一种图像阴影矫正的方法、系统及相关装置与流程
本技术涉及图像阴影矫正的,尤其涉及一种图像阴影矫正的方法、系统及相关装置。
背景技术:
1、由于照明不均匀、相机拍摄视角倾斜等原因,图像中常常会出现阴影,这些阴影会影响图像的质量和后续的图像处理任务。为了改善这一问题,需要对图像进行阴影矫正处理,图像阴影矫正是计算机视觉和图像处理领域的关键技术,目前已广泛应用于医学影像、遥感图像、视频监控等领域。
2、现有技术中的部分阴影矫正算法在去除阴影时需要经过颜色空间转换,可能导致图像信息失真,影响图像质量。也有些另一些阴影矫正算法效果显著,但计算复杂度高,处理时间长,难以满足实时应用场景的需求。且这些阴影矫正算法往往仅对特定类型的阴影和特定场景效果较好,面对不同场景或不同类型的阴影则表现不佳,通用性和适应性不足。
技术实现思路
1、本技术提供了一种图像阴影矫正的方法、系统及相关装置,用于针对不同的阴影分布情况灵活调整补偿模式,在更广泛的应用场景中保证高效和精准的阴影矫正效果。
2、本技术第一方面提供了一种图像阴影矫正的方法,包括:所述方法包括通过方式一或/和方式二对待矫正图像进行补偿矫正;
3、所述方式一包括:
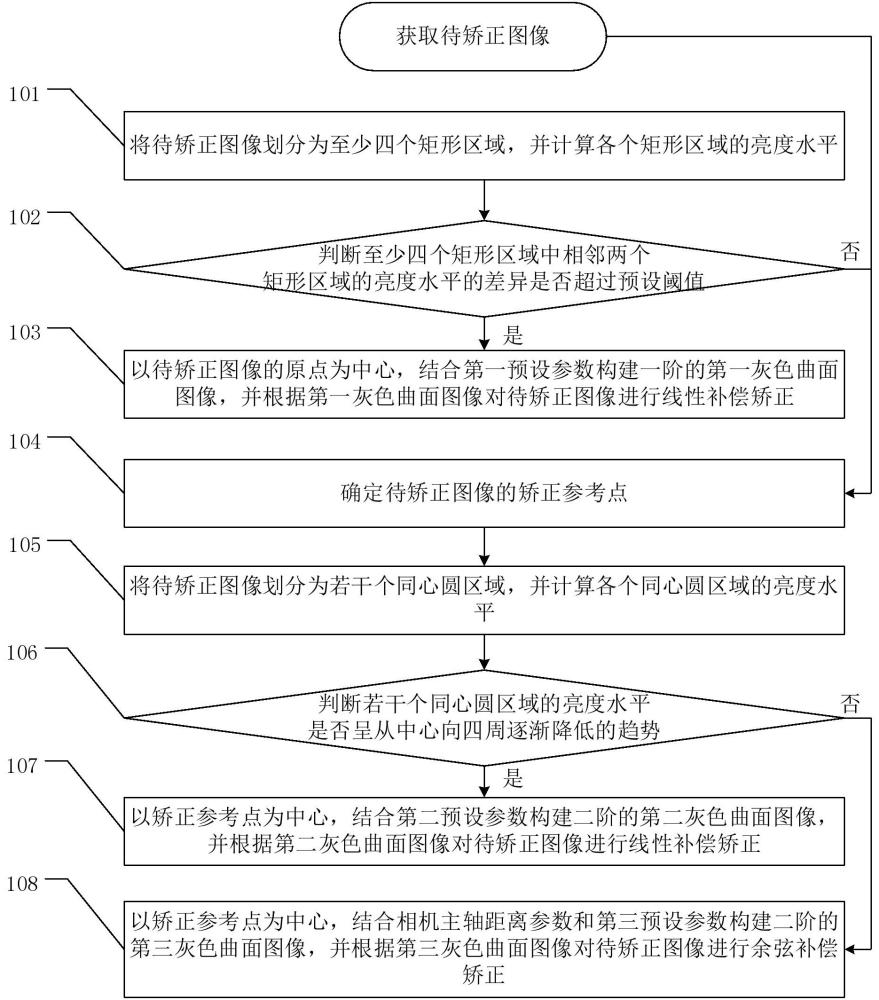
4、获取所述待矫正图像,将所述待矫正图像划分为至少四个矩形区域,并计算各个矩形区域的亮度水平;
5、判断所述至少四个矩形区域中相邻两个矩形区域的亮度水平的差异是否超过预设阈值;
6、若是,则以所述待矫正图像的原点为中心,结合第一预设参数构建一阶的第一灰色曲面图像,并根据所述第一灰色曲面图像对所述待矫正图像进行线性补偿矫正;
7、所述方式二包括:
8、获取所述待矫正图像,确定所述待矫正图像的矫正参考点;
9、将所述待矫正图像划分为若干个同心圆区域,并计算各个同心圆区域的亮度水平;
10、判断所述若干个同心圆区域的亮度水平是否呈从中心向四周逐渐降低的趋势;
11、若是,则以所述矫正参考点为中心,结合第二预设参数构建二阶的第二灰色曲面图像,并根据所述第二灰色曲面图像对所述待矫正图像进行线性补偿矫正;
12、若否,则以所述矫正参考点为中心,结合相机主轴距离参数和第三预设参数构建二阶的第三灰色曲面图像,并根据所述第三灰色曲面图像对所述待矫正图像进行余弦补偿矫正。
13、可选的,所述根据所述第二灰色曲面图像对所述待矫正图像进行线性补偿矫正,包括:
14、通过第一目标公式对所述第二灰色曲面图像进行线性变换;
15、将经过线性变换后的第二灰色曲面图像与所述待矫正图像相乘,得到线性补偿矫正后的输出图像。
16、可选的,所述第一目标公式为:
17、v' = v * (ratio_2-ratio_1)/max+ ratio_1;
18、其中,v为所述第二灰色曲面图像,ratio_1和ratio_2为线性补偿系数,max为所述第二灰色曲面图像的最大灰度值,v'为线性变换后的第二灰色曲面图像。
19、可选的,所述根据所述第三灰色曲面图像对所述待矫正图像进行余弦补偿矫正,包括:
20、通过第二目标公式对所述第三灰色曲面图像进行余弦变换;
21、将经过余弦变换后的第三灰色曲面图像与所述待矫正图像相乘,得到余弦补偿矫正后的输出图像。
22、可选的,所述第二目标公式为:
23、;
24、其中,v为所述第三灰色曲面图像,level为大于1的正整数,v'为线性变换后的第三灰色曲面图像。
25、可选的,所述确定所述待矫正图像的矫正参考点,包括:
26、将所述待矫正图像转换为灰度图像,并计算所述灰度图像的亮度直方图和累积直方图;
27、根据所述累积直方图确定亮度阈值,并基于所述亮度阈值在所述灰度图像中确定发亮区域;
28、根据所述发亮区域的重心确定所述待矫正图像的矫正参考点。
29、可选的,所述根据所述发亮区域的重心确定所述待矫正图像的矫正参考点,包括:
30、统计所述发亮区域的个数,并计算每个所述发亮区域的灰度平均值;
31、根据所述灰度平均值对每个所述发亮区域进行加权处理;
32、根据加权处理后的所有发亮区域的重心确定所述待矫正图像的矫正参考点。
33、本技术第二方面提供了一种图像阴影矫正的系统,包括:第一补偿矫正单元或/和第二补偿矫正单元,所述第一补偿矫正单元和第二补偿矫正单元用于获取待矫正图像,并对所述待矫正图像进行补偿矫正;
34、所述第一补偿矫正单元包括:
35、第一划分模块,用于将所述待矫正图像划分为至少四个矩形区域,并计算各个矩形区域的亮度水平;
36、第一判断模块,用于判断所述至少四个矩形区域中相邻两个矩形区域的亮度水平的差异是否超过预设阈值;
37、第一矫正模块,用于当第一判断模块的判断结果为是时,以所述待矫正图像的原点为中心,结合第一预设参数构建一阶的第一灰色曲面图像,并根据所述第一灰色曲面图像对所述待矫正图像进行线性补偿矫正;
38、所述第二补偿矫正单元包括:
39、确定模块,用于确定所述待矫正图像的矫正参考点;
40、第二划分模块,用于将所述待矫正图像划分为若干个同心圆区域,并计算各个同心圆区域的亮度水平;
41、第二判断模块,用于判断所述若干个同心圆区域的亮度水平是否呈从中心向四周逐渐降低的趋势;
42、第二矫正模块,用于当所述第二判断模块的判断结果为是时,以所述矫正参考点为中心,结合第二预设参数构建二阶的第二灰色曲面图像,并根据所述第二灰色曲面图像对所述待矫正图像进行线性补偿矫正;
43、第三矫正模块,用于当所述第二判断模块的判断结果为否时,以所述矫正参考点为中心,结合相机主轴距离参数和第三预设参数构建二阶的第三灰色曲面图像,并根据所述第三灰色曲面图像对所述待矫正图像进行余弦补偿矫正。
44、可选的,所述第二矫正模块具体用于:
45、通过第一目标公式对所述第二灰色曲面图像进行线性变换;
46、将经过线性变换后的第二灰色曲面图像与所述待矫正图像相乘,得到线性补偿矫正后的输出图像。
47、可选的,所述第一目标公式为:
48、v' = v * (ratio_2-ratio_1)/max+ ratio_1;
49、其中,v为所述第二灰色曲面图像,ratio_1和ratio_2为线性补偿系数,max为所述第二灰色曲面图像的最大灰度值,v'为线性变换后的第二灰色曲面图像。
50、可选的,所述第三矫正模块具体用于:
51、通过第二目标公式对所述第三灰色曲面图像进行余弦变换;
52、将经过余弦变换后的第三灰色曲面图像与所述待矫正图像相乘,得到余弦补偿矫正后的输出图像。
53、可选的,所述第二目标公式为:
54、;
55、其中,v为所述第三灰色曲面图像,level为大于1的正整数,v'为线性变换后的第三灰色曲面图像。
56、可选的,所述第二获取模块具体用于:
57、将所述待矫正图像转换为灰度图像,并计算所述灰度图像的亮度直方图和累积直方图;
58、根据所述累积直方图确定亮度阈值,并基于所述亮度阈值在所述灰度图像中确定发亮区域;
59、根据所述发亮区域的重心确定所述待矫正图像的矫正参考点。
60、可选的,所述第二获取模块具体还用于:
61、统计所述发亮区域的个数,并计算每个所述发亮区域的灰度平均值;
62、根据所述灰度平均值对每个所述发亮区域进行加权处理;
63、根据加权处理后的所有发亮区域的重心确定所述待矫正图像的矫正参考点。
64、本技术第三方面提供了一种图像阴影矫正的装置,所述装置包括:
65、处理器、存储器、输入输出单元以及总线;
66、所述处理器与所述存储器、所述输入输出单元以及所述总线相连;
67、所述存储器保存有程序,所述处理器调用所述程序以执行第一方面以及第一方面中任一项可选的图像阴影矫正的方法。
68、本技术第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质上保存有程序,所述程序在计算机上执行时执行第一方面以及第一方面中任一项可选的图像阴影矫正的方法。
69、从以上技术方案可以看出,本技术具有以下优点:
70、通过划分矩形区域和同心圆区域,并利用灰色曲面图像进行线性或余弦补偿矫正,降低了计算复杂度和处理时间,能够满足实时应用的需求。此外,本方法在方式一中通过判断矩形区域亮度水平差异,以及方式二中根据同心圆区域判断亮度水平趋势,选择不同的一阶或二阶灰色曲面图像进行线性或余弦的多模式阴影矫正补偿,提高了对不同类型阴影和各种场景的适应性,可针对不同的阴影分布情况灵活调整补偿模式,能够在更广泛的应用场景中保证高效和精准的阴影矫正效果。且本技术直接在原始颜色空间中通过灰色曲面进行补偿矫正,有效地避免了颜色空间转换过程中可能引入的色彩偏差和失真问题,确保了图像的真实性和细节的完整保留。
71、尤其在显示面板缺陷检测的场景下,相机利用侧视角度拍摄能更容易捕捉到mura类缺陷现象,但会造成图像亮度不均匀,此时尤其适用本技术提供的图像阴影矫正方法,能够根据图像实际情况合理且高效的矫正阴影,并且对不同拍摄情况造成的阴影自适应选择不同的矫正模式,同时保证算法节拍,最大化提升图像质量和检测效果。
- 还没有人留言评论。精彩留言会获得点赞!