一种用于显示屏异物分层检测的定位方法、系统及装置与流程
本技术涉及显示,尤其涉及一种用于显示屏异物分层检测的定位方法、系统及装置。
背景技术:
1、显示模组通常由若干层组成,例如oled显示模组由上往下一般包括cg层(盖板玻璃),oca层(光学胶),pol层(偏光片),panel层(像素层),sf层(支撑膜),tu层(复合胶带)。这些不同的层次结构在组装贴合成形的工艺工程中,会不可避免地出现在其中夹入异物的现象,造成夹层异物缺陷。这种夹层异物缺陷会不同程度上降低显示屏产品的显示质量,影响用户的视觉感受和使用体验,因此需要在显示模组生产过程中进行夹层异物缺陷的检测。
2、现有技术中,对异物缺陷的分层检测需要首先确认一个拍图的基准位置,如像素层位置。在确认基准位置时,传统方法是通过人工手动调整显微镜头聚焦位置来定位像素层,但这种方法存在检测成本高、主观性强、对检测技术人员的经验和技能要求较高等不足。此外还存在一些自动定位基准位置的方法,如在某一设定高度范围内采集一组图片,并对每一幅图像进行清晰度分析,进而实现像素层的定位。但该方法需要控制相机在不同高度位置拍摄多张图像,确定基准位置的耗费时间较长,导致显示屏异物分层检测的整体效率低下,且无法满足高速生产线的节拍需求。
技术实现思路
1、本技术提供了一种用于显示屏异物分层检测的定位方法、系统及装置,用于在显示屏异物分层检测中快速定位相机拍图的基准位置,提升显示屏异物分层检测的效率。
2、本技术第一方面提供了一种用于显示屏异物分层检测的定位方法,包括:
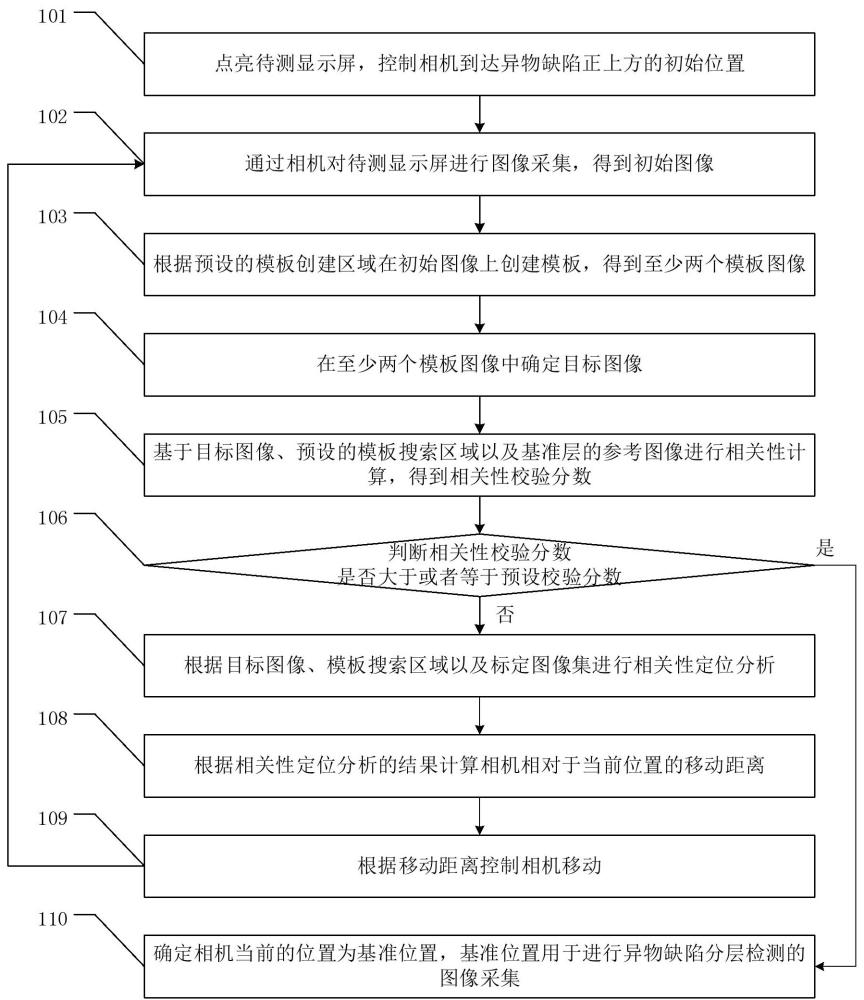
3、点亮待测显示屏,控制相机到达异物缺陷正上方的初始位置;
4、通过所述相机对所述待测显示屏进行图像采集,得到初始图像;
5、根据预设的模板创建区域在所述初始图像上创建模板,得到至少两个模板图像;
6、在所述至少两个模板图像中确定目标图像;
7、基于所述目标图像、预设的模板搜索区域以及基准层的参考图像进行相关性计算,得到相关性校验分数;
8、判断所述相关性校验分数是否大于或者等于预设校验分数;
9、若所述相关性校验分数小于所述预设校验分数,则根据所述目标图像、所述模板搜索区域以及标定图像集进行相关性定位分析;
10、根据所述相关性定位分析的结果计算所述相机相对于当前位置的移动距离;
11、根据所述移动距离控制所述相机移动,并再次执行图像采集、创建模板和相关性计算的步骤,直至计算得到的所述相关性校验分数大于或者等于所述预设校验分数时,则确定所述相机当前的位置为基准位置,所述基准位置用于进行异物缺陷分层检测的图像采集。
12、可选的,基于所述目标图像、所述模板搜索区域以及所述标定图像集进行相关性计算,得到相关性分数集合;
13、基于所述相关性分数集合中的最大值在所述标定图像集中确定索引图像;
14、所述根据所述相关性定位分析的结果计算所述相机相对于当前位置的移动距离,包括:
15、根据所述索引图像计算所述相机相对于当前位置的移动距离。
16、可选的,所述标定图像集包括粗搜标定图像集和精搜标定图像集,所述基于所述目标图像、所述模板搜索区域以及所述标定图像集进行相关性计算,得到相关性分数集合,包括:
17、基于所述目标图像和所述模板搜索区域,对所述粗搜标定图像集中的所有图像进行相关性计算,得到粗搜结果;
18、根据所述粗搜结果确定索引区间;
19、基于所述目标图像和所述模板搜索区域,对所述精搜标定图像集中在所述索引区间内的图像进行相关性计算,得到相关性分数集合。
20、可选的,在所述判断所述相关性校验分数是否大于或者等于预设校验分数之后,所述定位方法还包括:
21、若所述相关性校验分数小于所述预设校验分数,则判断所述相关性校验分数是否大于上一次计算得到的相关性校验分数;
22、若是,则根据所述目标图像、所述模板搜索区域以及标定图像集进行相关性定位分析,并根据所述相关性定位分析的结果计算所述相机相对于当前位置的移动距离;
23、若否,则根据上一次计算得到的移动距离的负两倍确定所述相机相对于当前位置的移动距离。
24、可选的,所述在所述至少两个模板图像中确定目标图像,包括:
25、计算所述至少两个模板图像的灰度均值,根据所述灰度均值和预设阈值对所述至少两个模板图像进行筛选,排除所述灰度均值小于所述预设阈值的模板图像;
26、在剩余的模板图像中确定目标图像。
27、可选的,所述在剩余的模板图像中确定目标图像,包括:
28、确定剩余的模板图像的数量,并判断所述数量是否小于预设数量;
29、若是,则重新进行所述初始图像的采集;
30、若否,则根据剩余的模板图像的灰度均值的中值确定目标图像。
31、可选的,所述相关性计算和所述相关性定位分析采用phash感知哈希方法、ssim结构相似性方法、直方图距离度量方法以及ncc归一化互相关计算方法中的任一种方法。
32、本技术第二方面提供了一种用于显示屏异物分层检测的定位系统,包括:
33、第一控制单元,用于点亮待测显示屏,控制相机到达异物缺陷正上方的初始位置;
34、采集单元,用于通过所述相机对所述待测显示屏进行图像采集,得到初始图像;
35、创建单元,用于根据预设的模板创建区域在所述初始图像上创建模板,得到至少两个模板图像;
36、确定单元,用于在所述至少两个模板图像中确定目标图像;
37、第一相关性分析单元,用于基于所述目标图像、预设的模板搜索区域以及基准层的参考图像进行相关性计算,得到相关性校验分数;
38、第一判断单元,用于判断所述相关性校验分数是否大于或者等于预设校验分数;
39、第二相关性分析单元,若所述相关性校验分数小于所述预设校验分数,则根据所述目标图像、所述模板搜索区域以及标定图像集进行相关性定位分析;
40、距离计算单元,用于根据所述相关性定位分析的结果计算所述相机相对于当前位置的移动距离;
41、第二控制单元,用于根据所述移动距离控制所述相机移动,并再次执行图像采集、创建模板和相关性计算的步骤,直至计算得到的所述相关性校验分数大于或者等于所述预设校验分数时,则确定所述相机当前的位置为基准位置,所述基准位置用于进行异物缺陷分层检测的图像采集。
42、可选的,所述第二相关性分析单元具体用于:
43、基于所述目标图像、所述模板搜索区域以及所述标定图像集进行相关性计算,得到相关性分数集合;
44、基于所述相关性分数集合中的最大值在所述标定图像集中确定索引图像;
45、所述距离计算单元具体用于:
46、根据所述索引图像计算所述相机相对于当前位置的移动距离。
47、可选的,所述标定图像集包括粗搜标定图像集和精搜标定图像集,所述第二相关性分析单元具体还用于:
48、基于所述目标图像和所述模板搜索区域,对所述粗搜标定图像集中的所有图像进行相关性计算,得到粗搜结果;
49、根据所述粗搜结果确定索引区间;
50、基于所述目标图像和所述模板搜索区域,对所述精搜标定图像集中在所述索引区间内的图像进行相关性计算,得到相关性分数集合。
51、可选的,所述系统还包括第二判断单元,用于:
52、若所述相关性校验分数小于所述预设校验分数,则判断所述相关性校验分数是否大于上一次计算得到的相关性校验分数;
53、若是,则根据所述目标图像、所述模板搜索区域以及标定图像集进行相关性定位分析,并根据所述相关性定位分析的结果计算所述相机相对于当前位置的移动距离;
54、若否,则根据上一次计算得到的移动距离的负两倍确定所述相机相对于当前位置的移动距离。
55、可选的,所述确定单元具体用于:
56、计算所述至少两个模板图像的灰度均值,根据所述灰度均值和预设阈值对所述至少两个模板图像进行筛选,排除所述灰度均值小于所述预设阈值的模板图像;
57、在剩余的模板图像中确定目标图像。
58、可选的,所述确定单元具体还用于:
59、确定剩余的模板图像的数量,并判断所述数量是否小于预设数量;
60、若是,则重新进行所述初始图像的采集;
61、若否,则根据剩余的模板图像的灰度均值的中值确定目标图像。
62、可选的,所述相关性计算和所述相关性定位分析采用phash感知哈希方法、ssim结构相似性方法、直方图距离度量方法以及ncc归一化互相关计算方法中的任一种方法。
63、本技术第三方面提供了一种用于显示屏异物分层检测的定位装置,所述装置包括:
64、处理器、存储器、输入输出单元以及总线;
65、所述处理器与所述存储器、所述输入输出单元以及所述总线相连;
66、所述存储器保存有程序,所述处理器调用所述程序以执行第一方面以及第一方面中任一项可选的方法。
67、本技术第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质上保存有程序,所述程序在计算机上执行时执行第一方面以及第一方面中任一项可选的方法。
68、从以上技术方案可以看出,本技术具有以下优点:
69、首先点亮待测显示屏,并将相机移动到初始位置进行图像采集,得到初始图像。根据预设的模板创建区域在初始图像上创建至少两个模板图像,并从中确定目标图像。然后,基于目标图像、预设的模板搜索区域和基准层的参考图像进行相关性计算,得到相关性校验分数。若相关性校验分数低于预设值,则通过目标图像、模板搜索区域和标定图像集进行相关性定位分析,计算相机的移动距离,并控制相机移动后再次执行图像采集和相关性计算。如此循环直至相关性校验分数达到预设值,则确定相机当前位置为基准位置。而基准位置能够将相机固定在最佳拍摄距离,相机在基准位置进行图像采集得到基准层图像,通过该基准层图像能够准确的确定缺陷位置并生成缺陷分割图像,从而实现显示屏异物分层检测。
70、本技术通过相关性分析来快速定位基准位置,能够显著减少轴的动作次数和拍照张数,缩短在显示屏异物分层检测中相机拍图的基准位置的定位时间,从而提升用于显示屏异物分层检测的定位效率,进而使得在硬件条件不支持飞拍的情况下,也能极大提升定位节拍效率,满足生产需求。
- 还没有人留言评论。精彩留言会获得点赞!