一种作业现场安全监管方法、系统、设备和介质与流程
本发明涉及电力系统,尤其涉及作业现场安全监管方法、系统、设备和介质。
背景技术:
1、电力营销现场作业的作业行为具体是指装电表、接电、对用电的检查、业扩查勘等,对于电力企业来说,只有保证了设备的安全、电网的安全以及人身安全才是其发展的首要条件,因此,对电力营销现场作业的安全管控尤为重要。
2、随着社会经济的高速发展,电气营销的现场作业安全性也引起了人们的关注。目前,电气营销作业现场环境复杂多样,违章判断载体容易和背景相混淆,现有的作业现场安全监管方法依靠人力进行监管,监管效率低下,人力成本高,极易出现监管盲区问题,现场情况难以全面及时掌控,导致安全监管结果准确度低。
技术实现思路
1、本发明提供了一种作业现场安全监管方法、系统、设备和介质,解决了现有的现场作业安全监管方法依靠人力进行监管,极易出现监管盲区问题,难以全面及时掌控现场情况,导致安全监管结果准确度低的技术问题。
2、本发明提供的一种作业现场安全监管方法,包括:
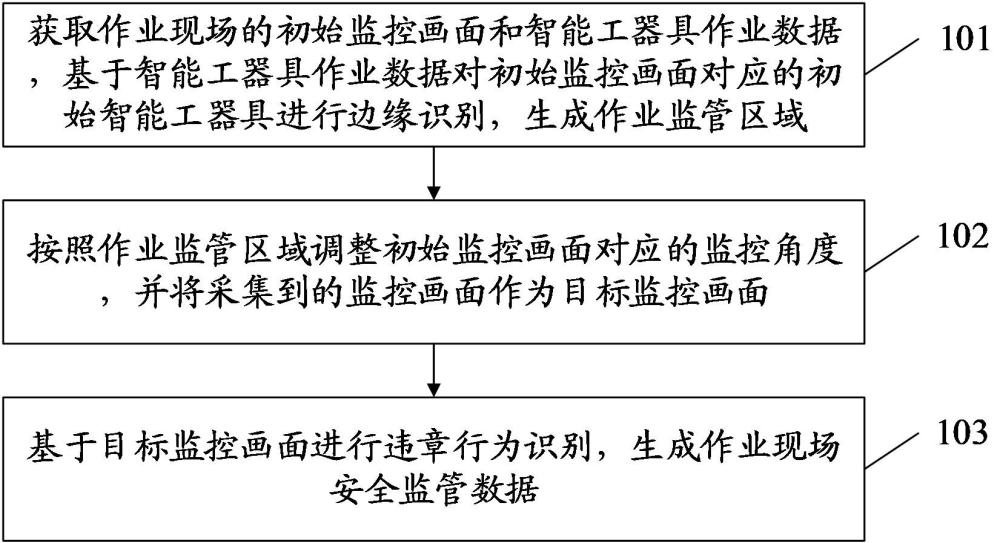
3、获取作业现场的初始监控画面和智能工器具作业数据,基于所述智能工器具作业数据对所述初始监控画面对应的初始智能工器具进行边缘识别,生成作业监管区域;
4、按照所述作业监管区域调整所述初始监控画面对应的监控角度,并将采集到的监控画面作为目标监控画面;
5、基于所述目标监控画面进行违章行为识别,生成作业现场安全监管数据。
6、可选地,所述基于所述智能工器具作业数据对所述初始监控画面对应的初始智能工器具进行边缘识别,生成作业监管区域的步骤,包括:
7、选取所述初始监控画面中与所述智能工器具作业数据对应的初始智能工器具,生成目标智能工器具;
8、基于所述目标智能工器具对应的位置数据对所述初始监控画面进行特征提取,生成多个原特征点;
9、选取所述初始监控画面中与所述原特征点对应的特征点,生成多个匹配特征点;
10、基于所述匹配特征点将所述初始监控画面进行分割并进行灰度处理,生成多个目标灰度单元块;
11、分别将所述目标灰度单元块的区域边界连接起来,生成作业监管区域。
12、可选地,所述选取所述初始监控画面中与所述智能工器具作业数据对应的初始智能工器具,生成目标智能工器具的步骤,包括:
13、当所述智能工器具作业数据对应的作业状态为验电作业时,将所述初始监控画面中的智能验电器和绝缘手套作为目标智能工器具;
14、当所述智能工器具作业数据对应的作业状态为接地作业时,将所述初始监控画面中的智能接地线和绝缘手套作为目标智能工器具;
15、当所述智能工器具作业数据对应的作业状态为接地线异常时,将所述初始监控画面中的智能接地线和绝缘手套作为目标智能工器具;
16、当所述智能工器具作业数据对应的作业状态为登高作业时,判断所述智能工器具作业数据对应的安全带识别数据是否为预设识别数据;
17、若所述安全带识别数据为预设识别数据,则将所述初始监控画面中的智能手环和安全带作为目标智能工器具;
18、若所述安全带识别数据不为所述预设识别数据,则将所述初始监控画面中的智能手环、安全带和扶梯作为目标智能工器具。
19、可选地,所述基于所述目标智能工器具对应的位置数据对所述初始监控画面进行特征提取,生成多个原特征点的步骤,包括:
20、按照所述目标智能工器具对应的位置数据和预设分辨率数据将所述初始监控画面进行多次平滑处理,构建所述初始监控画面对应的图像金字塔;
21、分别选取所述图像金字塔中各图像的图像边缘对应的特征点,生成多个图像特征点;
22、分别采用所述图像特征点在图像边缘上对应的切线方向作为所述图像特征点的方向向量,生成所述图像特征点对应的原特征点。
23、可选地,所述基于所述匹配特征点将所述初始监控画面进行分割并进行灰度处理,生成多个目标灰度单元块的步骤,包括:
24、按照全部所述匹配特征点和预设分割尺寸将所述初始监控画面进行分割,生成多个单元块;
25、分别将所述单元块进行灰度处理,生成多个初始灰度单元块;
26、将所述初始灰度单元块分别与相邻的单元块进行灰度值比较,生成所述初始灰度单元块对应的多个比较数据;
27、当所述比较数据存在预设比较阈值时,将所述初始灰度单元块作为目标灰度单元块。
28、可选地,所述基于所述目标监控画面进行违章行为识别,生成作业现场安全监管数据的步骤,包括:
29、采用所述作业现场对应的作业现场违章视频图像集进行分类标注,构建典型违章行为样本库;
30、采用所述典型违章行为样本库对初始深度学习模型进行模型训练,生成目标深度学习模型;
31、通过所述目标深度学习模型对所述目标监控画面进行违章行为识别,生成作业现场安全监管数据。
32、可选地,所述通过所述目标深度学习模型对所述目标监控画面进行违章行为识别,生成作业现场安全监管数据的步骤,包括:
33、通过目标深度学习模型采用所述目标监控画面对应的个人防护标准对所述目标监控画面中的作业人员进行个人防护识别,生成个人防护识别数据;
34、当所述个人防护识别数据为异常时,采用所述个人防护识别数据,构建第一作业现场安全监管数据;
35、当所述个人防护识别数据为正常时,通过目标深度学习模型对所述目标监控画面对应的智能工器具工作数据进行器具工作状态识别,生成器具工作状态数据;
36、当所述器具工作状态数据为异常时,采用所述器具工作状态数据,构建第二作业现场安全监管数据;
37、当所述器具工作状态数据为正常时,通过目标深度学习模型将所述目标监控画面中的作业行为与对应的典型违章行为进行行为比对,生成行为比对数据;
38、当所述行为比对数据为相同时,采用所述行为比对数据,构建第三作业现场安全监管数据;
39、当所述行为比对数据为不相同时,将第四作业现场安全监管数据设置为作业现场无违章行为。
40、本发明还提供了一种作业现场安全监管系统,包括:
41、作业监管区域生成模块,用于获取作业现场的初始监控画面和智能工器具作业数据,基于所述智能工器具作业数据对所述初始监控画面对应的初始智能工器具进行边缘识别,生成作业监管区域;
42、目标监控画面确定模块,用于按照所述作业监管区域调整所述初始监控画面对应的监控角度,并将采集到的监控画面作为目标监控画面;
43、作业现场安全监管数据生成模块,用于基于所述目标监控画面进行违章行为识别,生成作业现场安全监管数据。
44、本发明还提供了一种电子设备,包括存储器及处理器,所述存储器中储存有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行实现如上述任一项作业现场安全监管方法的步骤。
45、本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被执行时实现如上述任一项作业现场安全监管方法。
46、从以上技术方案可以看出,本发明具有以下优点:
47、本发明通过对初始监控画面对应的初始智能工器具进行边缘识别,及时调整监控角度,避免出现监管盲区问题,全面掌控现场情况。通过对调整监控角度后采集得到的目标监控画面进行违章行为识别,能够及时发现违章行为,保障作业人员的人身安全,提高安全监管结果准确度。解决了现有的现场作业安全监管方法依靠人力进行监管,极易出现监管盲区问题,难以全面及时掌控现场情况,导致安全监管结果准确度低的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!