一种固定式线激光相机的标定方法与流程
本发明属于线激光测量,特别是涉及一种固定式线激光相机的标定方法。
背景技术:
1、对于3d线激光轮廓传感器(3d单线激光相机),其工作原理是单条激光线通过三角测量法可以获取物体表面的x与z向信息。市面上大部分的单线激光相机的应用都集中在扫描的场合,主要关注单线轮廓图的相对尺寸位置以及利用点云信息来做缺陷检测,这些应用往往不关注相机坐标系与外部基准坐标系的转换关系,相机标定往往不需要,即便有也是只能通过一些特定型块对部分自由度进行标定。而对于多个3d线激光轮廓传感器同步测量的场合,各个相机统一坐标系,而且是6自由度的坐标系转换与快速标定,就缺少一种可靠与快速的标定算法,因此提出一种固定式线激光相机的标定方法。
技术实现思路
1、本发明的目的在于提供一种固定式线激光相机的标定方法,解决现有的问题。
2、为解决上述技术问题,本发明是通过以下技术方案实现的:
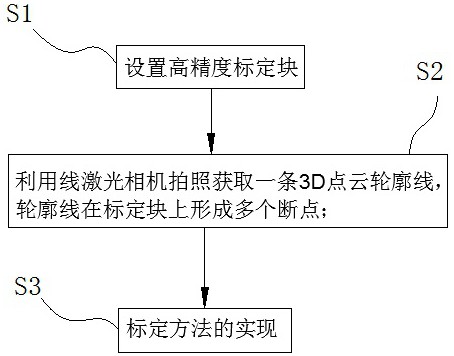
3、本发明为一种固定式线激光相机的标定方法,包括以下步骤:
4、s1、设置高精度标定块,标定块各个平面都是严格互相垂直与平行的,通过外部设备测量标定块上各平面位置,用于构建标定块坐标系;
5、s2、利用线激光相机拍照获取一条3d点云轮廓线,轮廓线在标定块上形成多个断点;
6、s201、所述断点记作:p1、p2、p3、p4、p5、p6、p7、p8;
7、s3、标定方法的实现;
8、s301、获取标定块各平面数据;
9、s302、按rx、ry、rz的旋转顺序来求取转换矩阵;
10、rx的旋转即激光平面的旋转,通过p2-p3与p6-p7的实际距离dh与标准块高度h可以求得:
11、rx=±arccos(h/dh);
12、式中:rx代表绕着标定块基准坐标系x轴的旋转角度;
13、根据rx构建的矩阵为rotx:
14、;
15、式中:rotx是相机绕着标定块基准坐标系旋转rx角度后构成的旋转矩阵;
16、利用p3-p4和p5-p6之间的点云,构建出一条空间直线,表达式记作:
17、;
18、式中:zc表示相机坐标系下每个点云坐标的z方向;xc表示相机坐标系下每个点云坐标的x方向;k为直线斜率;b为直线截距;
19、由于这条直线在标定块z=0的平面上,上式中的斜率k对应的角度即为ry,于是:
20、ry=arctan(k);
21、式中:ry代表绕着标定块基准坐标系y轴的旋转角度;
22、此时,经ry构成的变换矩阵roty是:
23、;
24、式中:roty是相机绕着标定块基准坐标系旋转ry角度后构成的旋转矩阵;
25、利用p3、p6两点的测量值的距离dl,结合标准块的长度l的关系,可以求得rz;
26、rz=±arccos(l/dl)
27、式中:rz代表绕着标定块基准坐标系z轴的旋转角度;
28、根据rz构建旋转矩阵rotz:
29、;
30、式中:rotz是相机绕着标定块基准坐标系旋转rz角度后构成的旋转矩阵;
31、依次是绕着x\y\z轴旋转,即zyx顺序旋转矩阵方式:
32、;
33、式中:rot代表相机坐标系相对于标定块坐标系的旋转变换矩阵;
34、s303、求平移量t;
35、从z向开始,根据p3-p4与p5-p6之间的点云,求平均得出,因为这些点云都在标定块坐标系下z=0的位置上;于是,
36、;
37、;
38、;
39、式中:ptcloud_cam为相机坐标系下的点云;
40、ptcloud_base为标定块坐标系下的点云;
41、ptcloud_base[z]为这些点的z坐标值;
42、tz为相机坐标系相对于标定块坐标系的z向平移量;
43、然后x向平移,tx,根据p3、p6两点均值来求出;其中p3在x=0位置,p6在x=l的位置;
44、;
45、;
46、;
47、式中:tx为相机坐标系相对于标定块坐标系的x向平移量;
48、rot代表相机坐标系相对于标定块坐标系的旋转变换矩阵;
49、p3_base为p3点在标定块坐标系的位置;
50、p6_base为p6点在标定块坐标系的位置;
51、p3_base[x]为p3点在标定块坐标系的x坐标值;
52、p6_base[x]为p6点在标定块坐标系的x坐标值;
53、l为标定块的边长;
54、最后求y向平移ty,根据p4点可求得,由于p4点在斜边上,这个斜边的直线方程,按照设计,如下:
55、;
56、式中:x、y都是斜边上的点在标定块坐标系下x与y轴方向的坐标值;
57、将相机坐标系下的p4经旋转变换至标定块坐标系下:
58、;
59、式中:p4_base 是相机坐标系下p4点经rot旋转变换后,在标定块坐标系下的点位置;
60、于是:
61、;
62、式中:p4_base[x]代表该坐标点的x值;
63、p4_base[y]代表该坐标点的y值;
64、ty为相机坐标系相对于标定块坐标系的x向平移量;
65、平移矩阵t为:
66、;
67、式中:t为相机坐标系原点相对于标定块坐标系原点的平移量;
68、tx为相机坐标系相对于标定块坐标系的x向平移量;
69、ty为相机坐标系相对于标定块坐标系的y向平移量;
70、tz为相机坐标系相对于标定块坐标系的z向平移量;
71、s304、最后相机相对于标定块坐标系的综合变换矩阵为:
72、;
73、式中:m为相机坐标系相对于标定块坐标系的变换矩阵。
74、进一步地,所述步骤s1中标定块包括凸台,所述凸台下表面固定有安装板,所述凸台固定于安装板上表面中部,所述安装板一表面设置有若干安装孔,所述凸台上表面设置有凹槽,所述凹槽一边为斜对角边,所述凸台上表面中心对称设置有定位销。
75、进一步地,所述定位销为设计给定的,用于反向构建标定块坐标系。
76、进一步地,所述凸台为正方体结构,所述凸台上表面正方形边长需要大于相机激光线有效长度的一半,所述凸台高度大于相机纵向深度的一半。
77、进一步地,所述凹槽的设计,用于在相机图像中准确捕捉斜边上的点,并用这些数据计算激光线在标定块坐标系下的y方向的位置。
78、本发明具有以下有益效果:
79、本发明采用一种高精度凸台的机械结构,研发出一种能够快速标定3d单线激光相机的方法;该标定方法的优点:能够快速、准确获得3d单线激光相机坐标系相对于基准坐标系的转换矩阵;既可以作为相机初次安装的首次标定使用,也可以作为相机更换后的快速恢复标定,大大提高现场调试的效率与操作难度,有效降低停机时间造成的损失。
80、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
- 还没有人留言评论。精彩留言会获得点赞!