一种基于极值相位差分特征的近场空间谱相似度评估方法与流程
本发明涉及数据处理,特别是指一种基于极值相位差分特征的近场空间谱相似度评估方法。
背景技术:
1、通过将实际测试得到的、与目标位置对应的近场空间谱,称为测量空间谱。通过仿真得到的,所有搜索空间中潜在的目标位置所对应的近场空间谱,称为模版空间谱。利用从测量空间谱提取的查询特征,可以用于检索具有相关特征的模版空间谱,用于目标定位。但是,由于电磁场的叠加特性,多目标测量空间谱的特征矢量容易受到破坏,一方面导致检索出过多的无效模版空间谱,另一方面不能用查询特征直接进行相似度评估。
技术实现思路
1、本发明为了解决测量空间谱容易受多种因素影响产生失真导致不能使用查询特征相似度评估的难题,提出一种基于极值相位差分特征的近场空间谱相似度评估方法,包括以下步骤:
2、一种基于极值相位差分特征的近场空间谱相似度评估方法,包括以下步骤:
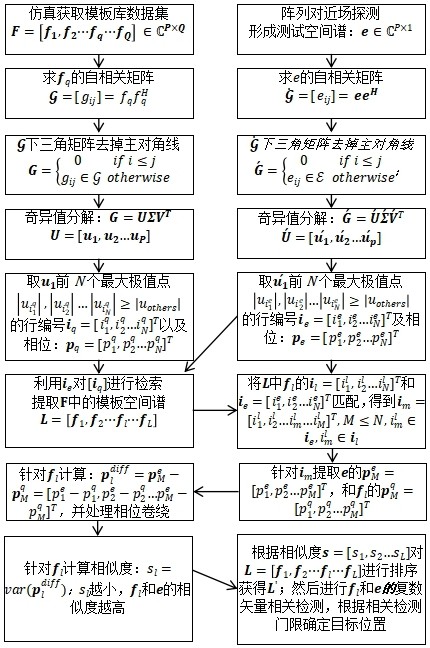
3、步骤1,针对每一幅模版空间谱,计算复数自相关矩阵的下三角矩阵,并将主对角线置零,得到矩阵;对每一个矩阵进行奇异值分解:,获得左奇异向量矩阵<mi>u</mi><mi>=[</mi><msub><mi>u</mi><mn>1</mn></msub><mi>,</mi><msub><mi>u</mi><mn>2</mn></msub><mi>…</mi><msub><mi>u</mi><mi>p</mi></msub><mi>]</mi>;取的前n个最大极值点,将n个最大极值点的行编号<msub><mi>i</mi><mi>q</mi></msub><mi>=</mi><mi>[</mi><msubsup><mi>i</mi><mn>1</mn><mi>q</mi></msubsup><mi>,</mi><msubsup><mi>i</mi><mn>2</mn><mi>q</mi></msubsup><mi>…</mi><msubsup><mi>i</mi><mi>n</mi><mi>q</mi></msubsup><msup><mi>]</mi><mi>t</mi></msup>作为模板空间谱的检索矢量,并将n个最大极值点的相位<msub><mi>p</mi><mi>q</mi></msub><mi>=[</mi><msubsup><mi>p</mi><mn>1</mn><mi>q</mi></msubsup><mi>,</mi><msubsup><mi>p</mi><mn>2</mn><mi>q</mi></msubsup><mi>…</mi><msubsup><mi>p</mi><mi>n</mi><mi>q</mi></msubsup><msup><mi>]</mi><mi>t</mi></msup>作为相似度评估的基础数据;其中,n为设定值;
4、步骤2,针对测量空间谱,计算复数自相关矩阵的下三角矩阵,并将主对角线置零,得到矩阵,对矩阵进行奇异值分解:,获得左奇异向量矩阵<mover><mi>u</mi><mo stretchy="true">́</mo></mover><mi>=[</mi><mover><msub><mi>u</mi><mn>1</mn></msub><mo stretchy="true">́</mo></mover><mi>,</mi><mover><msub><mi>u</mi><mn>2</mn></msub><mo stretchy="true">́</mo></mover><mi>…</mi><mover><msub><mi>u</mi><mi>p</mi></msub><mo stretchy="true">́</mo></mover><mi>]</mi>;取的前n个最大极值点,将n个最大极值点的行编号<msub><mi>i</mi><mi>e</mi></msub><mi>=[</mi><msubsup><mi>i</mi><mn>1</mn><mi>e</mi></msubsup><mi>,</mi><msubsup><mi>i</mi><mn>2</mn><mi>e</mi></msubsup><mi>…</mi><msubsup><mi>i</mi><mi>n</mi><mi>e</mi></msubsup><msup><mi>]</mi><mi>t</mi></msup>作为测量空间谱的检索矢量,并将n个最大极值点的相位<msub><mi>p</mi><mi>e</mi></msub><mi>=[</mi><msubsup><mi>p</mi><mn>1</mn><mi>e</mi></msubsup><mi>,</mi><msubsup><mi>p</mi><mn>2</mn><mi>e</mi></msubsup><mi>…</mi><msubsup><mi>p</mi><mi>n</mi><mi>e</mi></msubsup><msup><mi>]</mi><mi>t</mi></msup>作为相似度评估的基础数据;其中,n为设定值;
5、步骤3,利用对进行检索,提取模板库数据集中和测量空间谱相关的模板空间谱数据集;
6、步骤4,针对模板空间谱数据集中的每一个模板空间谱,将对应的特征矢量<msub><mi>i</mi><mi>l</mi></msub><mi>=[</mi><msubsup><mi>i</mi><mn>1</mn><mi>l</mi></msubsup><mi>,</mi><msubsup><mi>i</mi><mn>2</mn><mi>l</mi></msubsup><mi>…</mi><msubsup><mi>i</mi><mi>n</mi><mi>l</mi></msubsup><msup><mi>]</mi><mi>t</mi></msup>与<msub><mi>i</mi><mi>e</mi></msub><mi>=[</mi><msubsup><mi>i</mi><mn>1</mn><mi>e</mi></msubsup><mi>,</mi><msubsup><mi>i</mi><mn>2</mn><mi>e</mi></msubsup><mi>…</mi><msubsup><mi>i</mi><mi>n</mi><mi>e</mi></msubsup><msup><mi>]</mi><mi>t</mi></msup>进行匹配,找出两者共有的特征点集合<msub><mi>i</mi><mi>m</mi></msub><mi>=[</mi><msubsup><mi>i</mi><mn>1</mn><mi>l</mi></msubsup><mi>,</mi><msubsup><mi>i</mi><mn>2</mn><mi>l</mi></msubsup><mi>…</mi><msubsup><mi>i</mi><mi>m</mi><mi>l</mi></msubsup><msup><mrow><mi>…</mi><msubsup><mi>i</mi><mi>m</mi><mi>l</mi></msubsup><mi>]</mi></mrow><mi>t</mi></msup><mi>, m≤n, </mi><msubsup><mi>i</mi><mi>m</mi><mi>l</mi></msubsup><mi>∈</mi><msub><mi>i</mi><mi>e</mi></msub><mi>,</mi><msubsup><mi>i</mi><mi>m</mi><mi>l</mi></msubsup><mi>∈</mi><msub><mi>i</mi><mi>l</mi></msub>;
7、步骤5,针对,提取共同特征点在测量空间谱中的特征相位<msubsup><mi>p</mi><mi>m</mi><mi>e</mi></msubsup><mi>=[</mi><msubsup><mi>p</mi><mn>1</mn><mi>e</mi></msubsup><mi>,</mi><msubsup><mi>p</mi><mn>2</mn><mi>e</mi></msubsup><mi>…</mi><msubsup><mi>p</mi><mi>m</mi><mi>e</mi></msubsup><msup><mi>]</mi><mi>t</mi></msup>,以及在模板空间谱中的特征相位<msubsup><mi>p</mi><mi>m</mi><mi>q</mi></msubsup><mi>=[</mi><msubsup><mi>p</mi><mn>1</mn><mi>q</mi></msubsup><mi>,</mi><msubsup><mi>p</mi><mn>2</mn><mi>q</mi></msubsup><mi>…</mi><msubsup><mi>p</mi><mi>m</mi><mi>q</mi></msubsup><msup><mi>]</mi><mi>t</mi></msup>;
8、步骤6,计算模板空间谱匹配的特征相位与测量空间谱匹配的特征相位的差:<msubsup><mi>p</mi><mi>l</mi><mi>diff</mi></msubsup><mi>=</mi><msubsup><mi>p</mi><mi>m</mi><mi>e</mi></msubsup><mi>-</mi><msubsup><mi>p</mi><mi>m</mi><mi>q</mi></msubsup><mi>=</mi><mi>[</mi><msubsup><mi>p</mi><mn>1</mn><mi>e</mi></msubsup><mi>-</mi><msubsup><mi>p</mi><mn>1</mn><mi>q</mi></msubsup><mi>,</mi><msubsup><mi>p</mi><mn>2</mn><mi>e</mi></msubsup><mi>-</mi><msubsup><mi>p</mi><mn>2</mn><mi>q</mi></msubsup><mi>…</mi><msubsup><mi>p</mi><mi>m</mi><mi>e</mi></msubsup><mi>-</mi><msubsup><mi>p</mi><mi>m</mi><mi>q</mi></msubsup><msup><mi>]</mi><mi>t</mi></msup>;
9、步骤7,针对空间谱相位差数组,计算构成元素的方差,使用方差作为模版空间谱和测量空间谱的相似度:越小,和的相似度越高,函数代表方差函数,获得所有的相似度数据集;
10、步骤8,根据子空间模板空间谱的相似度数据<mi>s</mi><mi>=[</mi><msub><mi>s</mi><mn>1</mn></msub><mi>,</mi><msub><mi>s</mi><mn>2</mn></msub><mi>…</mi><msub><mi>s</mi><mi>l</mi></msub><mi>…</mi><msub><mi>s</mi><mi>l</mi></msub><mi>]</mi>从高到低的顺序,对模板空间谱数据集进行排序获得。
11、由于采用了上述技术方案,本发明与现有技术相比的有益效果在于:
12、本发明把空间谱的多个极值元素之间的相位差矢量作为相似度评估依据,摆脱绝对相位数据约束,反映了空间谱的内部结构的相位关系,捕捉了空间谱在不同方向上的相位变化模式,对于频率偏移、时间延迟、系统相位零值变化、目标特性变化等具有不变性,解决了测量空间谱容易受多种因素影响产生失真的难题,更适合作为相似度评估依据,可以增强相似度评估的鲁棒性。基于若干极值相位差分量特征的相似度评估方法提高了目标早期检出概率、减小了定位过程中的复数相关计算量,提高了目标定位的实时性。
- 还没有人留言评论。精彩留言会获得点赞!