一种基于物联网的牙种植体三维扫描建模方法及系统与流程
本技术涉及三维建模,尤其是涉及一种基于物联网的牙种植体三维扫描建模方法及系统。
背景技术:
1、在口腔医学领域,牙种植体作为一种常见的修复手段,其精确的三维建模对于手术规划、种植体设计以及术后效果评估至关重要。近年来,随着物联网技术的快速发展,基于物联网的牙种植体三维扫描建模技术逐渐崭露头角,为牙种植体的精准治疗提供了新的可能性。然而,尽管现有技术在三维扫描和建模方面取得了显著进展,但在细节捕捉和模型精度方面仍存在诸多不足。
2、现有的三维扫描设备,虽然能够实现对口腔内部结构的快速扫描和初步建模,但在面对牙种植体这一高精度要求的领域时,其性能往往显得力不从心;具体而言,现有设备在扫描过程中往往难以准确捕捉牙种植体及其周围牙槽骨的细微结构,如骨小梁、骨密度变化等,这些细微结构对于种植体的稳定性和长期效果具有重要影响;此外,由于扫描精度和分辨率的限制,现有技术在构建三维模型时往往存在误差,导致模型与实际情况存在偏差,进而影响手术规划和治疗效果。
3、综上所述,提供一种高建模精度的牙种植体三维扫描建模技术具有实际的应用价值和意义。
技术实现思路
1、为了提供一种高建模精度牙种植体三维扫描建模技术,本技术提供一种基于物联网的牙种植体三维扫描建模方法及系统。
2、第一方面,本技术的发明目的采用如下技术方案实现:
3、一种基于物联网的牙种植体三维扫描建模方法,所述方法包括:
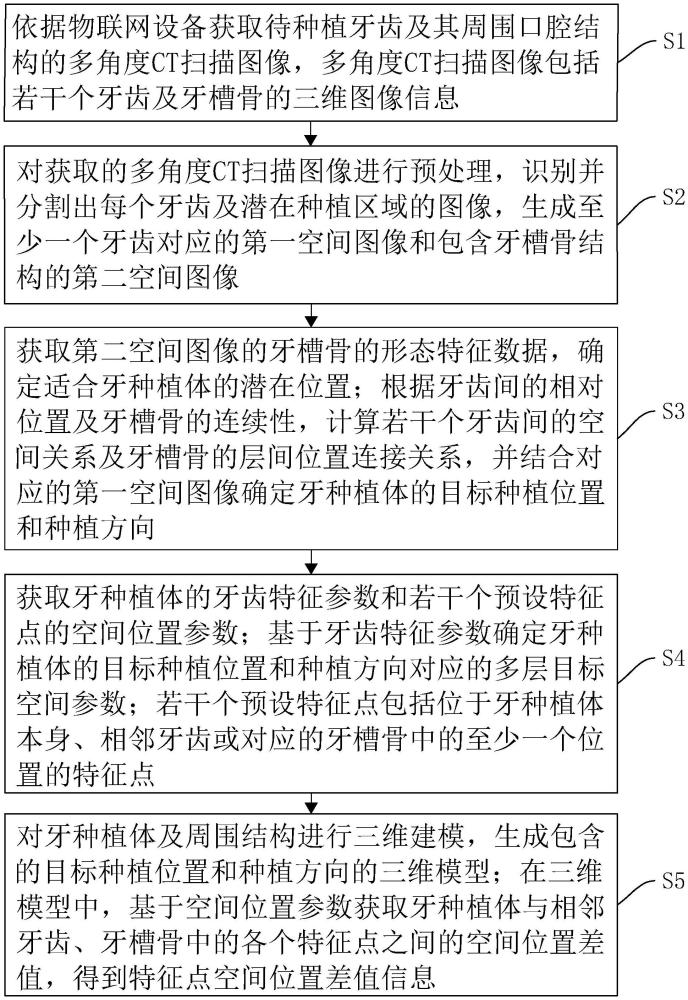
4、依据物联网设备获取待种植牙齿及其周围口腔结构的多角度ct扫描图像,所述多角度ct扫描图像包括若干个牙齿及牙槽骨的三维图像信息;
5、对获取的多角度ct扫描图像进行预处理,识别并分割出每个牙齿及潜在种植区域的图像,生成至少一个牙齿对应的第一空间图像和包含牙槽骨结构的第二空间图像;
6、获取所述第二空间图像的牙槽骨的形态特征数据,确定适合牙种植体的潜在位置;根据牙齿间的相对位置及牙槽骨的连续性,计算若干个牙齿间的空间关系及牙槽骨的层间位置连接关系,并结合对应的第一空间图像确定牙种植体的目标种植位置和种植方向;
7、获取牙种植体的牙齿特征参数和若干个预设特征点的空间位置参数;基于所述牙齿特征参数确定牙种植体的目标种植位置和种植方向对应的多层目标空间参数;若干个预设特征点包括位于牙种植体本身、相邻牙齿或对应的牙槽骨中的至少一个位置的特征点;
8、对牙种植体及周围结构进行三维建模,生成包含的目标种植位置和种植方向的三维模型;在所述三维模型中,基于所述空间位置参数获取牙种植体与相邻牙齿、牙槽骨中的各个特征点之间的空间位置差值,得到特征点空间位置差值信息。
9、通过采用上述技术方案,多角度ct扫描图像能够全面覆盖待种植牙齿牙齿及其周围口腔结构的各个细节,有效提升扫描精度,多角度扫描的方式有利于减少因单一视角而产生的信息缺失,提高细节捕捉能力;同时通过识别和分割每个牙齿及潜在种植区域的图像,有利于确保后续三维建模的精度,通过深入分析牙槽骨的形态特征数据,能够精确确定牙种植体的潜在位置,并通过计算的牙齿间的空间关系及牙槽骨的层间位置连接关系,为牙种植体的精确定位和种植方向的规划提供了科学依据,即实现种植牙的精确定位及规划,下一步通过获取牙种植体的牙齿特征参数和预设特征点的空间位置参数确定的多层目标空间参数,以使得设计的待种植牙的三维模型更贴合患者实际的口腔结构,三维模型的构建精度更高且有利于实现个性化牙种植体的三维模型构建,提高后续牙种植体的稳定性和舒适度,然后,为进一步监测和校验核准三维模型与实际的牙种植体模型健康度和模型还原精确度,本技术还基于空间位置参数获取牙种植体与相邻牙齿、牙槽骨中的各个特征点之间的空间位置差值,基于空间位置差值确定各个牙种植体与相邻牙齿、牙槽骨之间的空间位置差异情况,基于多个特征点的多处比较进行模型还原精确度的评价方式,模型精度效果评估数据更全面,数据更加精确,不仅提供了有利的数据支撑,还能使得构建的牙种植体三维模型有效协助医生更加精确地进行手术规划和操作,减少手术风险,从而实现了牙种植体三维扫描建模的精准化和智能化。
10、本技术在一较佳示例中:所述牙齿特征参数包括基于第一空间图像获取的牙齿形态、大小及缺陷特征信息;
11、所述基于所述牙齿特征参数确定牙种植体的目标种植位置和种植方向对应的多层目标空间参数,包括:
12、基于所述牙齿特征参数和对应的第二空间图像,分析牙槽骨的骨量、密度和形态,确定适合牙种植体的目标种植位置和种植方向;
13、计算待种植牙齿及其相邻牙齿、牙槽骨中关键结构的空间关系参数;所述空间关系参数包括距离参数和角度参数;
14、根据预设的智能评估算法,基于所述牙齿特征参数对应的空间关系参数确定满足预设条件的牙齿、牙槽骨结构作为对应的多层目标空间参数;所述预设条件基于空间大小、形态匹配度和骨量充足度进行预先设置。
15、通过采用上述技术方案,精确获取牙齿形态、大小及缺陷特征信息,并结合牙槽骨的骨量、密度和形态进行综合分析,以更准确地确定牙种植体的目标种植位置和种植方向,通过计算待种植牙齿及其相邻牙齿、牙槽骨中关键结构的空间关系参数,有效确保牙种植体与周围结构的完美匹配,实现精细化的空间分析,通过智能评估算法筛选出满足预设条件的牙齿、牙槽骨结构,以提高评估的准确性。
16、本技术在一较佳示例中:所述在所述三维模型中,基于所述空间位置参数获取牙种植体与相邻牙齿、牙槽骨中的各个特征点之间的空间位置差值,得到特征点空间位置差值信息之后,还包括:
17、在任一特征点的空间位置差值超出预设的差值范围时,触发空间位置信息收集指令,根据所述空间位置信息收集指令,获取实际手术环境的实时数据,所述实时数据包括患者口腔的实际尺寸变化、牙种植体与周围组织的初步接触信息;
18、基于所述特征点所在位置、对应的空间位置差值和实时数据,确定三维模型需要修正的修正区域和修正量,所述修正区域包括但不限于牙种植体的位置、方向、深度以及相邻牙齿和牙槽骨的形态;
19、基于所述修正区域和修正量对三维模型进行修正优化。
20、通过采用上述技术方案,基于实际手术环境的实时数据和实际的初步接触信息进行评估和修正优化的三维模型,模型还原度更高;,使得牙种植体的三维模型更符合实际手术现场的情况,使得医生能够根据实际手术环境进行动态调整,提高手术精度与安全性,基于特征点所在位置对应的空间位置差值和实时数据确定的修正区域和修正量,通过对牙种植体位置、相邻牙齿及牙槽骨的形态进行精准修正,有利于实现对手术区域的全面优化。
21、本技术在一较佳示例中:所述对获取的多角度ct扫描图像进行预处理,包括:
22、采用自适应阈值分割技术,根据牙齿和牙槽骨在多角度ct扫描图像中灰度差异,分割出牙齿和牙槽骨的轮廓,得到初始牙种植体图像;
23、对所述初始牙种植体图像进行形态学操作,去除所述牙种植体预处理图像中的噪声和伪影,得到去噪牙种植体图像;
24、利用预设的漫水填充算法对所述去噪牙种植体图像进行孔洞填充,得到预处理的多角度ct扫描图像。
25、通过采用上述技术方案,自适应阈值分割技术能够更准确得分割出牙齿和牙槽骨的轮廓,提高图像分割精度,利用漫水填充算法对去噪后的初始牙种植体图像进行孔洞填充,以利于修复初始牙种植体图像中因多种原因(如牙齿缺损、扫描伪影等)造成的孔洞或区域的有效方法,以为后续的单位建模提供更全面、准确的图像信息,从而有助于构件更精确、逼真的牙种植体的三维模型。
26、本技术在一较佳示例中:所述获取牙种植体的牙齿特征参数和若干个预设特征点的空间位置参数,包括:
27、获取牙种植体在多光谱光源照射下的多角度ct图像,基于所述多角度ct图像进行图像预处理和形态学分析,提取牙种植体的牙齿特征参数;所述牙齿特征参数包括产品特征和设计特征;
28、在牙种植体、相邻牙齿和对应的牙槽骨中选择若干个关键特征点作为预设特征点,所述预设特征点能够反映牙种植体与周围结构的空间位置关系;
29、基于若干个关键特征点分别一一获取对应的空间位置参数。
30、通过采用上述技术方案,在多光谱光源照射下的多角度ct图像更够更全面地捕抓牙种植体及周围环境的细微特征,提高牙齿特征参数的提取精准度,通过若干个预设特征点的预设方式,使其可以准确梵音牙种植体与周围结构的空间位置关系,有利于构建出准确性高且高度个性化的牙种植体三维模型。
31、第二方面,本技术的发明目的采用如下技术方案实现:
32、一种基于物联网的牙种植体三维扫描建模系统,包括:
33、物联网数据采集模块,用于依据物联网设备获取待种植牙齿及其周围口腔结构的多角度ct扫描图像,所述多角度ct扫描图像包括若干个牙齿及牙槽骨的三维图像信息;
34、ct图像处理与分割模块,用于对获取的多角度ct扫描图像进行预处理,识别并分割出每个牙齿及潜在种植区域的图像,生成至少一个牙齿对应的第一空间图像和包含牙槽骨结构的第二空间图像;
35、位置与关系计算模块,用于获取所述第二空间图像的牙槽骨的形态特征数据,确定适合牙种植体的潜在位置;根据牙齿间的相对位置及牙槽骨的连续性,计算若干个牙齿间的空间关系及牙槽骨的层间位置连接关系,并结合对应的第一空间图像确定牙种植体的目标种植位置和种植方向;
36、特征参数获取模块,用于获取牙种植体的牙齿特征参数和若干个预设特征点的空间位置参数;基于所述牙齿特征参数确定牙种植体的目标种植位置和种植方向对应的多层目标空间参数;若干个预设特征点包括位于牙种植体本身、相邻牙齿或对应的牙槽骨中的至少一个位置的特征点;
37、三维建模与差值计算模块,用于对牙种植体及周围结构进行三维建模,生成包含的目标种植位置和种植方向的三维模型;在所述三维模型中,基于所述空间位置参数获取牙种植体与相邻牙齿、牙槽骨中的各个特征点之间的空间位置差值,得到特征点空间位置差值信息。
38、通过采用上述技术方案,多角度ct扫描图像能够全面覆盖待种植牙齿牙齿及其周围口腔结构的各个细节,有效提升扫描精度,多角度扫描的方式有利于减少因单一视角而产生的信息缺失,提高细节捕捉能力;同时通过识别和分割每个牙齿及潜在种植区域的图像,有利于确保后续三维建模的精度,通过深入分析牙槽骨的形态特征数据,能够精确确定牙种植体的潜在位置,并通过计算的牙齿间的空间关系及牙槽骨的层间位置连接关系,为牙种植体的精确定位和种植方向的规划提供了科学依据,即实现种植牙的精确定位及规划,下一步通过获取牙种植体的牙齿特征参数和预设特征点的空间位置参数确定的多层目标空间参数,以使得设计的待种植牙的三维模型更贴合患者实际的口腔结构,三维模型的构建精度更高且有利于实现个性化牙种植体的三维模型构建,提高后续牙种植体的稳定性和舒适度,然后,为进一步监测和校验核准三维模型与实际的牙种植体模型健康度和模型还原精确度,本技术还基于空间位置参数获取牙种植体与相邻牙齿、牙槽骨中的各个特征点之间的空间位置差值,基于空间位置差值确定各个牙种植体与相邻牙齿、牙槽骨之间的空间位置差异情况,基于多个特征点的多处比较进行模型还原精确度的评价方式,模型精度效果评估数据更全面,数据更加精确,不仅提供了有利的数据支撑,还能使得构建的牙种植体三维模型有效协助医生更加精确地进行手术规划和操作,减少手术风险,从而实现了牙种植体三维扫描建模的精准化和智能化。
39、本技术在一较佳示例中:所述牙齿特征参数包括基于第一空间图像获取的牙齿形态、大小及缺陷特征信息;所述特征参数获取模块包括:
40、种植位置和种植方向确定单元,用于基于所述牙齿特征参数和对应的第二空间图像,分析牙槽骨的骨量、密度和形态,确定适合牙种植体的目标种植位置和种植方向;
41、空间关系计算单元,用于计算待种植牙齿及其相邻牙齿、牙槽骨中关键结构的空间关系参数;所述空间关系参数包括距离参数和角度参数;
42、智能评估单元,用于根据预设的智能评估算法,基于所述牙齿特征参数对应的空间关系参数确定满足预设条件的牙齿、牙槽骨结构作为对应的多层目标空间参数;所述预设条件基于空间大小、形态匹配度和骨量充足度进行预先设置。
43、第三方面,本技术的发明目的采用如下技术方案实现:
44、一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述一种基于物联网的牙种植体三维扫描建模方法的步骤。
45、第四方面,本技术的发明目的采用如下技术方案实现:
46、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述一种基于物联网的牙种植体三维扫描建模方法的步骤。
47、综上所述,本技术包括以下至少一种有益技术效果:
48、1. 多角度ct扫描图像能够全面覆盖待种植牙齿牙齿及其周围口腔结构的各个细节,有效提升扫描精度,多角度扫描的方式有利于减少因单一视角而产生的信息缺失,提高细节捕捉能力;同时通过识别和分割每个牙齿及潜在种植区域的图像,有利于确保后续三维建模的精度,通过深入分析牙槽骨的形态特征数据,能够精确确定牙种植体的潜在位置,并通过计算的牙齿间的空间关系及牙槽骨的层间位置连接关系,为牙种植体的精确定位和种植方向的规划提供了科学依据,即实现种植牙的精确定位及规划,下一步通过获取牙种植体的牙齿特征参数和预设特征点的空间位置参数确定的多层目标空间参数,以使得设计的待种植牙的三维模型更贴合患者实际的口腔结构,三维模型的构建精度更高且有利于实现个性化牙种植体的三维模型构建,提高后续牙种植体的稳定性和舒适度,然后,为进一步监测和校验核准三维模型与实际的牙种植体模型健康度和模型还原精确度,本技术还基于空间位置参数获取牙种植体与相邻牙齿、牙槽骨中的各个特征点之间的空间位置差值,基于空间位置差值确定各个牙种植体与相邻牙齿、牙槽骨之间的空间位置差异情况,基于多个特征点的多处比较进行模型还原精确度的评价方式,模型精度效果评估数据更全面,数据更加精确,不仅提供了有利的数据支撑,还能使得构建的牙种植体三维模型有效协助医生更加精确地进行手术规划和操作,减少手术风险,从而实现了牙种植体三维扫描建模的精准化和智能化;
49、2. 基于实际手术环境的实时数据和实际的初步接触信息进行评估和修正优化的三维模型,模型还原度更高;,使得牙种植体的三维模型更符合实际手术现场的情况,使得医生能够根据实际手术环境进行动态调整,提高手术精度与安全性,基于特征点所在位置对应的空间位置差值和实时数据确定的修正区域和修正量,通过对牙种植体位置、相邻牙齿及牙槽骨的形态进行精准修正,有利于实现对手术区域的全面优化;
50、3. 在多光谱光源照射下的多角度ct图像更够更全面地捕抓牙种植体及周围环境的细微特征,提高牙齿特征参数的提取精准度,通过若干个预设特征点的预设方式,使其可以准确梵音牙种植体与周围结构的空间位置关系,有利于构建出准确性高且高度个性化的牙种植体三维模型。
- 还没有人留言评论。精彩留言会获得点赞!