基于几何特征建模的薄膜型液化天然气储罐容量测量方法与流程
本发明属于lng薄膜罐容量测量,具体涉及基于几何特征建模的薄膜型液化天然气储罐容量测量方法。
背景技术:
1、大型lng(液化天然气)薄膜罐是由一个薄的钢质主容器(即薄膜)、绝热层和预应力混凝土罐体共同组成的能储存低温液体的复合结构。其优势是更低的材料成本、更好的结构独立性、气密性和高度的模块化。相较于全容罐,薄膜罐的内罐容积没有理论极限,可以设计容量更大的储罐。液化天然气进口贸易交接采用的船舶舱货物计量方式进行,考虑到船舶受到波浪、倾斜和形变等因素影响,液化天然气立式储罐计量比其有更好的计量准确性。企业在生产运行时,也需对储存量进行监控和校验,以确保液化天然气储量准确、受控。因此,对液化天然气储罐容量准确计量的具有重要意义。
2、由于lng薄膜罐内部结构复杂、体积巨大、且处于超低温工作状态,其容量计量的准确性难以有效保证。然而,国内外的技术规范尚无大型lng薄膜罐容量方法,传统的石油储罐采用三维激光扫描仪、全站仪、钢卷尺、径向偏差测量仪等设备测量储罐的几何形状的方法不能完全满足lng薄膜储罐的测量需求。另外,理论上lng薄膜罐其截面为正五十六边形,然而薄膜型lng储罐内表面为数量众多的波纹钢组成,其内部空间巨大、结构形状复杂,传统三维激光扫描仪难以实现对其高分辨率扫描,因此实现低分辨率条件对复杂波纹表面重建薄膜型液化天然气储罐容量计量的技术难点。
3、基于此,本技术提供提供一种基于几何特征建模的薄膜型液化天然气储罐容量测量方法,基于最小二乘拟合原理研究lng薄膜储罐正五十六边形截面拟合算法,基于几何特征建模构建薄膜型液化天然气储罐容量测量方法。研究结果表明,基于几何特征建模的方法可以实现薄膜型储罐的容量准确计量,对lng 薄膜储罐的容量计量具有重要的指导意义。
技术实现思路
1、为了弥补现有技术的不足,本发明目的在于提供基于几何特征建模的薄膜型液化天然气储罐容量测量方法,以解决现有薄膜型储罐的容量计量不准确的问题。为实现该目的,本技术具体技术方案如下:
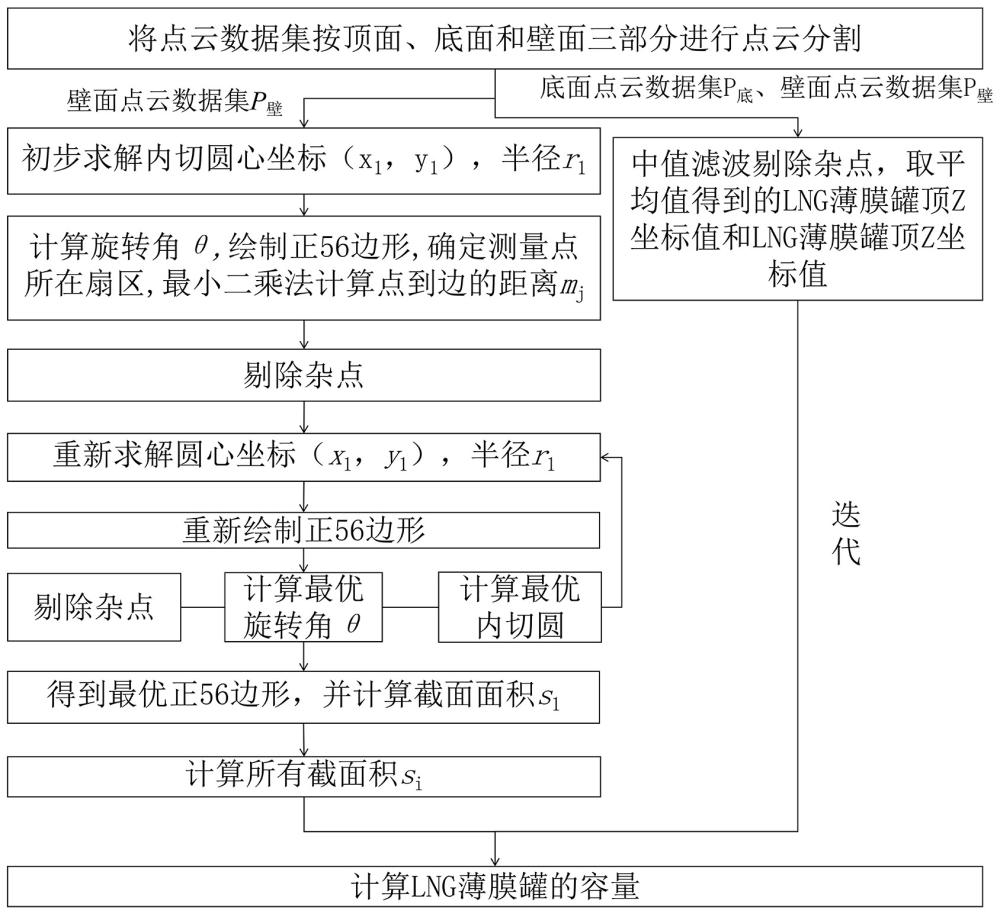
2、所述的基于几何特征建模的薄膜型液化天然气储罐容量测量方法,具体流程包括:
3、s1. 基于最小二乘拟合圆算法,初步确定lng薄膜罐正五十六边形的内切圆心坐标( x1, y1)、半径 r1;
4、s2. 根据角点离圆心距离最远原则,计算旋转角 θ,并绘制正五十六边形,确定测量点所在扇区;
5、s3. 基于最小二乘法计算点到边的距离 m i,剔除杂点,计算截面面积 s i;
6、s4. 通过多次迭代,剔除杂点,得到的lng薄膜罐底z坐标值和lng薄膜罐顶z坐标值;
7、s5. 计算lng薄膜罐的容量。
8、进一步地,所述步骤s1的具体计算步骤如下:
9、s11. 将扫描测量的薄膜型液化天然气储罐点云数据集在三维点云处理软件上按顶面、底面和壁面三部分进行点云分割,并导出顶面点云数据集 p顶、底面点云数据集 p底、壁面点云数据集 p壁; p顶( xi, yi, zi), i=1,2,…, j; p底( xi, yi, zi), i=1,2,…, k; p壁( xi, yi, zi), i=1,2,…, m0;
10、s12. 将壁面点云数据集 p壁( xi, yi, zi), i=1,2,…, m0,截取选取壁面中段数据按z坐标截取一段500mm点云, p壁( xi, yi, zi), z1 -250 <zi <z1 +250,取点云的x、y坐标,基于最小二乘拟合正五十六边形的内切圆算法,初步确定罐壁正五十六边形的内切圆心坐标( x1, y1);
11、s13. 将步骤s12截取的点云在z坐标方向按每10mm一层分割成若干个点云数据集 p壁j( xi, yi, zi), i=1,2,…, m2, zj-5 <zi <zj +5,根据步骤s12计算获得的罐壁正五十六边形的内切圆心坐标( x1, y1),计算每层半径 rj,记录半径 rj最小时 zj的值 zjmin,其中,
12、;
13、s14. 根据步骤s13计算所得 zjmin可以确定lng薄膜罐横向褶皱所在位置的z坐标,避开横向褶皱位置,将罐壁点云数据集 p壁( xi, yi, zi), i=1,2,…, m0,按200mm一层将罐壁点云截取形成若干个点云数据集 pn( xi, yi, zi);
14、s15. 将步骤s14的点云数据集 pn( xi, yi, zi),取第一个数据集 p1( xi, yi, zi)进行计算,首先最小二乘拟合正五十六边形的内切圆算法,初步确定lng薄膜罐正五十六边形的内切圆心坐标( x1, y1)、半径 r1。
15、进一步地,所述步骤s12中,选取壁面中段数据按z坐标截取一段500mm点云,根据壁面点云数据集 p壁( xi, yi, zi), i=1,2,…, m1 ,计算中段位置z坐标值:,取 z1-250 < m1 <z1 +250的点云数据集;最小二乘拟合正五十六边形的内切圆算法:
16、,
17、,
18、,
19、,
20、,
21、则有:,,,罐壁正五十六边形的内切圆心坐标( x1, y1)和半径 r1的估计拟合值为:
22、,,。
23、进一步地,所述步骤s14中,在罐壁点云数据集 p壁( xi, yi, zi), i=1,2,…, m0,截取若干个点云数据集 pn( xi, yi, zi),使各个点云数据集满足z坐标和,。
24、进一步地,所述步骤s2的具体算法如下:
25、计算数据集 p1( xi, yi, zi)中各个点到内切圆心坐标( x1, y1)的距离,使该距离最大的点( xj, yj)即为角点,对于正多边形,其旋转角 θ可以通过角点坐标计算:。
26、进一步地,所述步骤s3的具体算法如下:
27、s31. 计算各点到对应边的距离 m i,将点到对应边的距离超过阈值的点当做杂点剔除,在小范围内改变内切圆心坐标( x1, y1)、半径 r1和旋转角 θ的值,使各点到对应边的距离 m i值的平方和最小,记录该圆心坐标( x1, y1)、半径 r1和旋转角 θ;
28、s32. 将步骤s31重复3~4次,期间逐步缩小阈值m1的大小,得到最优正五十六边形内切圆圆心坐标( x1, y1)、半径 r1,并计算该截面面积:
29、;
30、s33. 计算所有截面积:
31、。
32、进一步地,所述步骤s31中,对于正边形,其扇区夹角为:
33、,
34、第 j个扇区角平分线与 x轴的夹角为:
35、 ,
36、因此,在第j扇区上的某点,其在该扇区角平分线上的投影长度为:
37、,
38、根据投影长度与其内切圆半径之间的差值,计算得到各点到对应的边的距离:
39、 ,
40、设定阈值m1,将的点当做杂点剔除;
41、在小范围内改变圆心坐标( x1, y1)、半径 r1和旋转角 θ,根据最小二乘原理拟合使各点到对应边的距离 m i值的平方和最小,记录此时的圆心坐标( x1, y1)、半径 r1和旋转角 θ,则:
42、。
43、进一步地,所述步骤s4中,将底面点云数据集 p底( xi, yi, zi), i=1,2,…, k,采用中值滤波方式剔除异常点,再求解点云数据集 z坐标值的平均值:
44、 ;
45、将 p顶( xi, yi, zi), i=1,2,…, j,采用中值滤波方式剔除异常点,再求解点云数据集 z坐标值的平均值:
46、。
47、进一步地,所述步骤s5中,根据计算得到的lng薄膜罐底z坐标值和lng薄膜罐顶z坐标值,确定lng薄膜罐横向褶皱所在位置的z坐标:,将lng薄膜罐若干层,计每层高度为,从下至上依次计算各层,其表示式为:
48、,
49、式中,为第层的面积;为第层的层高,单位为mm;为各层的序号;
50、lng薄膜罐在 h高度时体积为:
51、,,
52、则lng薄膜罐的总容量 v为:
53、,
54、式中,为lng薄膜罐内褶皱的附加体积以及罐内导向管等附件的体积。
55、与现有技术相比,本发明有以下优点:本发明基于最小二乘拟合原理设计lng薄膜储罐正五十六边形截面拟合算法,通过计算截面面积 s i和lng薄膜罐底z坐标值z底和lng薄膜罐顶z坐标值z顶,继而计算lng薄膜罐的总容量 v;该方法实用性较好,测量效率、数据处理效率和准确度均较高,具有很好的推广应用价值。
- 还没有人留言评论。精彩留言会获得点赞!