一种用于提取线阵相机偏航模式数据斜纹角度的处理方法与流程
本技术属于相机成像,公开了一种用于提取线阵相机偏航模式数据斜纹角度的处理方法。
背景技术:
1、星载传感器在长期运行过程中,其影像会出现不同程度、不同种类的辐射不均匀问题,这是由于光学系统空间响应的不均匀性(如镜头各部分光学透过率的不同)、光栅狭缝不可能处处宽度一致、各个探测器响应的差异、探元的损坏、ccd的暗电流、ccd阵列外电子链路的不一致性等多种问题,从而导致红外图像的非均匀性,严重影响着红外传感器的成像质量。
2、相对辐射校正是一种常用的遥感图像处理方法,旨在消除由于地物表面反射率不均匀、大气散射和吸收等因素引起的图像辐射差异。这种校正方法可以提高遥感图像的质量,使其更符合实际地物的辐射特性。针对以上问题可以通过相对辐射校正消除由于传感器或电荷耦合器件探元的响应不一致引起的辐射不均匀效应,地面系统处理中相对辐射校正采用的是线性校正模型。
3、dnfinal=anonuniformity×dnde+bnonuniformity
4、式中dnfinal为经过辐射校正最终输出的dn值,dnde为前一步校正后的dn值,anonuniformity和bnonuniformity为非均匀校正系数,该系数同样与载荷工作状态有关,需要定期监控更新。
5、偏航定标是基于对地成像数据统计的相对辐射校正系数提取方法。在偏航模式下,由于ccd所有像元均可以对同一地物成像,可以基于偏航数据进行相对辐射校正。
6、正常推扫成像和偏航扫描成像过程如图2所示。图中将传感器固有非均匀性用1~5每个探元不同灰度来表示,正常扫描得到的图像,既包含传感器的非均匀性,又包含不同地物的差异,且二者很难分离。如果将传感器旋转90°,使探元空间维方向与扫描方向平行,则1~5所有探元均可依次扫描c\h\m\r\w地物。此时所得图像中就不包含地物本身的非均匀性,表现出的是传感器固有的非均匀性。这就是偏航数据可以用作相对辐射校正的原理。
7、偏航数据处理的第一步就是进行地物对齐(也称之为规定化),即让图像中相同地物处在同一行中,如图3所示。所以计算准确的偏航斜纹角度对于偏航定标流程是很重要的。
8、偏航定标数据具有数据量大、每次偏航定标斜纹角度不一致等特点。正常偏航数据在固定速高比下每次的斜纹角度理论上是一个标准定值。然而对于星载高光谱载荷而言,受地球自转的影响、采样频率的变化、速高比的变化等每一个外在变换都会使每次偏航数据斜纹角度不一致。地物对齐如果使用理论斜纹角度,会将上述误差引入系数计算中,从而导致高光谱影像无法进行相对辐射校正。为了消除该误差,需要尽可能的计算每次偏航数据的高精度斜纹角度,随着高光谱相机在各行各业广泛运用,推扫式高光谱相机偏航定标成为一种稳定可靠的定标模式。
9、在偏航模式下,由于ccd所有像元对同一地物成像,可以基于偏航数据进行相对辐射定标,然而偏航数据斜纹角度受相机线阵速度和帧频的影响,每一次偏航斜纹角度并非固定,对后续求取定标系数影响非常大,因此快速精准提取偏航数据斜纹角度成为一种新的需求。
10、武汉大学陈儒在《海洋一号d卫星海岸带成像仪偏航90°相对辐射定标》论文中针对hy-1d卫星海岸带成像仪的结构特点,提出了一种基于探元邻接关系的偏航数据自动标准化方法,有效地改善了海洋一号海岸带成像仪偏航图像非线性畸变的问题,保证了线阵电荷耦合器件ccd(charged coupled device)探元对同一地物成像的理论前提。利用hy-1d海岸带成像仪偏航90°辐射定标数据计算获得相机相对辐射定标系,对卫星正常推扫影像进行相对辐射定标实验,利用偏航辐射定标数据进行相对辐射定标后,陆地场景下传感器所有探元最大条纹系数优于0.33%,平均条纹系数优于0.04%,中位数条纹系数优于0.03%;海洋场景下传感器所有探元最大条纹系数优于0.48%,平均条纹系数优于0.07%,中位数条纹系数优于0.06%,各项指标均优于基于大量数据统计的在轨统计法。
11、中国空间技术研究院遥感卫星总体部梁德印在《星载高光谱成像仪在轨偏航定标方法》论文中提出一种基于卫星平台90°偏航机动的高光谱成像仪在轨偏航定标方法,包括偏航数据的获取及数据处理、分析方法。基于资源一号02d卫星在轨数据对此方法进行了验证,结果表明:该方法对高光谱成像仪的相对辐射校正具有良好的效果,探测器所有像元相对辐射定标精度可达1%,原始图像中的条纹噪声得到很好去除。文章提出的方法可以实现高光谱成像仪的高频次、全视场相对辐射校正,为后续高光谱数据的定量化应用打下基础。
12、中国专利cn113570523b公开了针对光学图像的相对辐射校正系数自动生成和外推方法,其步骤包括:利用卫星上的相机采集光学图像,解析卫星下传的偏航定标数据中的辅助数据,获得卫星上的相机的当前档位增益gcur和当前积分级数icur,并设定卫星上的相机的目标档位增益gtgt和目标积分级数itgt;对偏航影像数据进行斜线校正;计算各探元的灰度直方图和所有探元的综合直方图,对直方图进行匹配,获得相机当前档位的相对辐射校正系数;对相对辐射校正系数进行线性拟合,得到线性辐射校正系数;根据线性外推公式,计算卫星上的相机的目标档位的相对辐射校正系数。本方法不依赖人工进行图像的选取,可有效减小定标工作量,生成的相对辐射定标系数准确性较高,提升了定标系数质量。
13、现有技术中经常用于提取偏航斜纹角度算法有lsd和ransac:
14、中国专利cn117474874a公开了一种自动化光学遥感卫星在轨图像质量监测方法及系统中地物刃边特征区域选取环节采用lsd算法和基于阈值的特征集筛选等开展,且基于刃边信噪比进行了有效刃边特征筛选。
15、中国专利cn106909902a一种基于改进的层次化显著模型的遥感目标检测方法中提到从待检测的输入图像中自顶向下地提取出机场和油罐目标的先验特征,分别生成目标特征图。对于机场目标,利用lsd(line segment detector,直线检测算子)对待检测的输入图像进行直线检测,得到直线检测结果。
16、中国专利cn116563349a公开了高光谱图像处理方法、装置、电子设备及介质中提到采用surf算法从第一高光谱图像搜索出配准点;采用lsd算法从第一高光谱图像获取配准线对,根据配准线对进行次区域划分,其中次区域划分包括采用lsd算法获取的原始线段,根据梯度方向将原始线段的邻域划分为左邻域和右邻域,在每个线段的直线的邻域内,任意像素到该直线的距离以及到垂直的等分线的距离满足预设值时,以该直线作为配准线。采用ransac方法细化配准点,构造单应性矩阵矢量变量,在保持单应性矩阵矢量变量最小时,计算计待匹配图像之间变换的单应性矩阵,并通过svd算法对单应性矩阵进行计算并获取最小值,其中待匹配图像为配准点和配准线对应的第一高光谱图像。
17、中国专利cn114972625a公开了一种基于rgb光谱超分辨技术的高光谱点云生成方法中提到对于每个图像匹配对计算对极几何,通过ransac算法优化改善匹配对,特征点在匹配对中链式地传递下去,得到重构性最强,异常值最少的初始化图像对。
18、中国专利cn114218857a公开了一种多光谱采集的高光谱计算成像方法、系统及相关设备中提到按照所述对应点计算所述投影图片与其他所述光谱特征图片两两之间的所述投影变换矩阵,本发明实施例中能够得到7个所述投影变换矩阵,同时,在得到所述投影变换矩阵的过程中使用ransac算法(随机抽样一致性算法)对所述投影变换矩阵进行处理,确保所述投影变换矩阵的鲁棒性。
19、lsd算法对噪声具有一定的鲁棒性,能够处理具有噪声和细节复杂的图像,但在处理大图像时,计算复杂度较高。ransac可以与其他算法(如霍夫变换)结合使用,提高直线检测的效果,但需要设定合适的参数(如迭代次数和阈值),不当选择可能影响结果的准确性。这些算法在处理偏航数据时,暴露出时效性低、占用电脑资源高、计算精度低、不适用于自动化流程等问题。
技术实现思路
1、针对上述问题,本发明提出一种用于提取线阵相机偏航模式数据斜纹角度的处理方法,包括读取偏航数据,搭建计算每个角度下的最优标准差算子,逐波段进行计算,求取最优角度,实现高效精准提取相机偏航模式下数据斜纹角度的方法。为后续对偏航数据处理提供可靠角度参数。也为后续有同样需求的工程提供一种解决思路,本发明的内容如下:
2、本发明提供了一种用于提取线阵相机偏航模式数据斜纹角度的处理方法,其技术点在于,具体包括以下步骤:
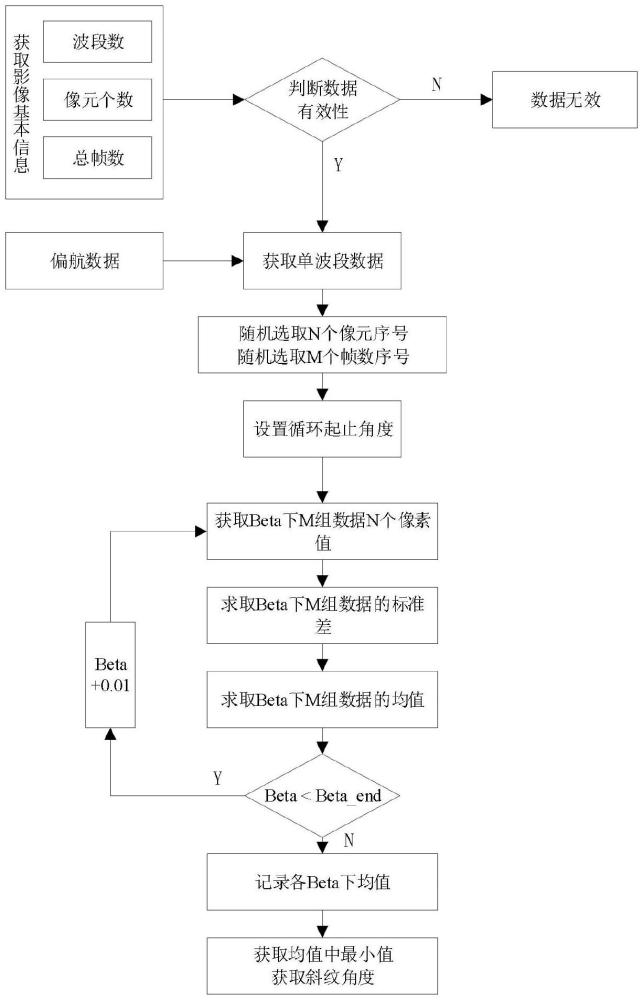
3、步骤1,读取偏航数据头文件信息,获取影像基本信息,包括波段数bands、像元个数samples和总帧数lines,读取影像并判断数据是否有效;
4、步骤2,将步骤1中的有效数据读入缓存中,获取单波段影像;
5、步骤3,对步骤2得到的单波段影像随机选取n个像元序号和m个帧号;
6、步骤4,设置循环起止角度βst和βend;
7、步骤5,循环遍历步骤4中起止角度βst和βend之间的数值,角度为β;
8、步骤6,循环遍历步骤3中m个帧号,帧号为m;
9、步骤7,过点(1,m),β为k,建立一条直线方程,该方程与n个像元序号所在列的交点数组记为数组i,通过公式计算数组i的标准差,其中为数组i的平均值;
10、步骤8,每个角度可获取长度为m的标准差数组ii,数组ii求平均为
11、步骤9,将步骤4止角度βst和βend之间所有角度对应的求最小值为βbest;
12、步骤10,βbest为该组数据的斜纹角度。
13、为了更好的实现上述技术方案,本发明的用于提取线阵相机偏航模式数据斜纹角度的处理方法中的描述步骤1中波段数bands、像元个数samples和总帧数lines满足liens>2*samples。
14、为了更好的实现上述技术方案,本发明的用于提取线阵相机偏航模式数据斜纹角度的处理方法中的描述步骤3中n个像元序号和m个帧号应满足:samples<m<liens-samples,1<n<samples。
15、为了更好的实现上述技术方案,本发明的用于提取线阵相机偏航模式数据斜纹角度的处理方法中的描述步骤4中角度βst和βend应满足:-90/180*pi<βst<βend<90/180*pi。
16、与现有技术相比,本发明的一种用于提取线阵相机偏航模式数据斜纹角度的处理方法有益效果为:
17、本发明用于提取线阵相机偏航模式数据斜纹角度的处理方法可以快速、精准提取偏航数据斜纹角度,不需要人为调参,将半自动定标流程转为全自动流程,此外该算法占用资源极少,时效性高,准确率高,为后续高光谱数据相对辐射定标提供可靠定标系数,也为后续有同样需求的工程提供一种解决思路。
- 还没有人留言评论。精彩留言会获得点赞!