一种基于拟合的地面目标分割方法与流程
本发明属于三维数据处理分析,具体涉及一种基于拟合的地面目标分割方法。
背景技术:
1、目前,国内外已有多种基于lidar的地表目标分割方法,主要有5种:基于网格、基于拟合、基于特征、基于图形和基于学习。
2、基于网格的方法将点云数据投影到二维高程图中,并在每一栅格上建立地表属性。该方法可以快速获得分割结果,但可能会错误地分割道路上的悬垂点和平面点,从而导致后续的感知任务缺乏足够的点云信息。
3、基于拟合的方法通常将一个点云划分为多个区域,并在每个区域使用平面模型或直线模型来拟合地面。这种算法对坡度较大的道路有很好的适应性,但是其分割效果很大程度上依赖于种子点的选取。
4、基于特征的方法利用相邻点之间的几何关系对地表和非地表进行分类,该方法可以准确地获得非地点,但由于噪声点而容易发生错误分割。
5、基于图形的方法通常使用图模型来分割点,而基于学习的方法使用神经网络来分割点,这两种方法在地面分割方面都具有优异的性能,但都很耗时;此外,基于学习的方法需要大量的标记数据来训练模型,并且它不能很好地用于与训练数据集不同的不同类型的传感器或场景。
6、地面分割作为许多感知任务的预处理任务,应满足以下两个要求,首先,地表划分必须要有足够的速度,以便能够更有效地操作感知系统;其次,对地表的分割要有较强的鲁棒性。
7、综上,目前急需一种新的基于拟合的地面目标分割方法解决现有的基于拟合的方法存在的欠分割问题。
技术实现思路
1、本发明要解决的技术问题是提供一种能增强算法对噪声和复杂环境的适应能力;减少数据处理量,提高算法整体效率的基于拟合的地面目标分割方法。
2、本发明的技术方案为:一种基于拟合的地面目标分割方法,包括以下步骤:
3、(1)、初步筛选:通过垂直点滤波器去除明显的非地面点;
4、(2)、极坐标网格划分:使用极坐标网格图构建点云,激光雷达坐标系统的原点是坐标原点,坐标在极坐标的方向上被划分为k段,每段划分为l个网格,使用以下公式将点云数据转换为极坐标系,并将这些数据映射到一个离散的极坐标网格中:
5、
6、其中,k表示极坐标网格中的角度索引,l表示极坐标网格中的径向索引,ri,j表示点(i,j)到原点的径向距离,θi,j表示极坐标系中的方位角角度,rmax表示点云的最大径向距离,xi,j和yi,j分别表示点(i,j)的x和y坐标;
7、(3)、地面点分类:计算极性网格中每个网格的高度值,并采用加权均值滤波方法对地表高程值格进行光滑化,设定一个阈值,若网格的高度值小于该阈值则认为该点为地面点,否则为非地面点;所述计算极性网格中每个网格的高度值的计算公式为:
8、
9、其中,d表示相邻两个网格之间的距离,w表示最终的加权平均值,表示极性网格中每个网格的高度值,wu表示第u个值的权重,zu表示第u个值的地面高度,n表示邻域点的数量;
10、(4)、迭代优化,包括以下步骤:
11、s1、将极性网格中的每个网格的高度值更新为该网格点地点的最小高度值z,而不包含地点的其他网格的高度值保留为空;
12、s2、用线性插值法填充两个非空网格之间的空网格;
13、s3、将极性网格中的每个网格的高度值进行平滑处理;
14、s4、将极性网格中的每个网格的高度值扩展到相邻网格;
15、s5、若极性网格中的每个网格的高度值小于步骤(3)中的阈值,则将该非地面点重新分类为地面点;
16、(5)、后处理:对初步分类结果进行后处理,去除噪声点,并修正误分类的点。
17、进一步地,所述垂直点滤波器去除明显的非地面点的方法为:设置一个垂直阈值,筛选出与地面相关的点云数据,即:zp<threshold,其中,zp表示点p在z轴上的坐标值,threshold表示垂直阈值。
18、进一步地,所述加权均值滤波方法对地表高程值格进行光滑化步骤中处理边界的方法为镜像边界处理法,所述镜像边界处理法包括以下步骤:
19、(1)、确定边界;
20、(2)、创建虚拟网格:对于每个边界网格,根据边界的方向,在其外部创建一个或多个虚拟网格;
21、(3)、赋值:虚拟网格的高程值设定为与最近的边界网格相同的高程值;
22、(4)、计算权重:虚拟网格的权重根据其与边界网格之间的距离确定,距离越近,权重越大;距离越远,权重越小;
23、(5)、加权平均:将边界网格及其邻居网格的高程值进行加权平均,得到边界网格的最终高程值。
24、更进一步地,所述加权平均的计算公式为:
25、
26、其中,表示边界网格的最终高程值,n表示邻居网格的数量,zi表示第i个邻居网格的高程值,wi表示权重。
27、更进一步地,所述距离的计算公式为:
28、
29、其中,d表示虚拟网格点与边界网格点之间的欧几里得距离,rv表示虚拟网格点的径向距离,rb表示边界网格点的径向距离,θv表示虚拟网格点的极坐标角度,θb表示边界网格点的极坐标角度;
30、所述权重的计算公式为:
31、
32、其中,wi是第i个网格单元的权重,d表示虚拟网格点与边界网格点之间的欧几里得距离。
33、进一步地,所述阈值的计算公式为:
34、trect(x,y)=μ(x,y)+k·σ(x,y),
35、其中,trect(x,y)表示点(x,y)处的自适应阈值,μ(x,y)表示点(x,y)处的局部均值,σ(x,y)表示点(x,y)处的局部标准差,k表示调整阈值敏感度的一个常数。
36、进一步地,所述线性插值法填充两个非空网格之间的空网格的步骤为:
37、(1)、确定需要插值的空网格;
38、(2)、找到相邻的两个非空网格,设定这两个非空网格为(k1,l1)和(k2,l2),则它们的高度分别为zk1,l1和zk2,l2;
39、(3)、计算插值权重:
40、
41、其中,l1表示第一个非空网格的位置,,l2表示第二个非空网格的位置,l表示插值的位置,w1表示第一个非空网格的插值权重,w2表示第二个非空网格的插值权重;
42、(4)、计算插值高度:
43、
44、其中,zk,l表示空网格的高度值,w1表示第一个非空网格的插值权重,w2表示第二个非空网格的插值权重,zk1,l1表示第一个非空网格的高度值,zk2,l2表示第二个非空网格的高度值;
45、(5)、将计算得到的高度值zk,l赋值给该空网格;
46、(6)、对所有的空网格重复上述步骤(1)至步骤(5),直到所有的空网格都被填充为止。
47、进一步地,所述步骤s3中的平滑处理的表达式为:
48、
49、其中,表示当前网格单元的地面高度值,表示当前网格单元左侧相邻网格单元的地面高度值,表示当前网格单元右侧相邻网格单元的地面高度值。
50、进一步地,所述步骤s4中将极性网格中的每个网格的高度值扩展到相邻网格的表达式为:
51、
52、其中,表示当前网格单元的地面高度值,表示邻近网格的地面高度值,(k′,l′)∈n表示邻域中的网格坐标。
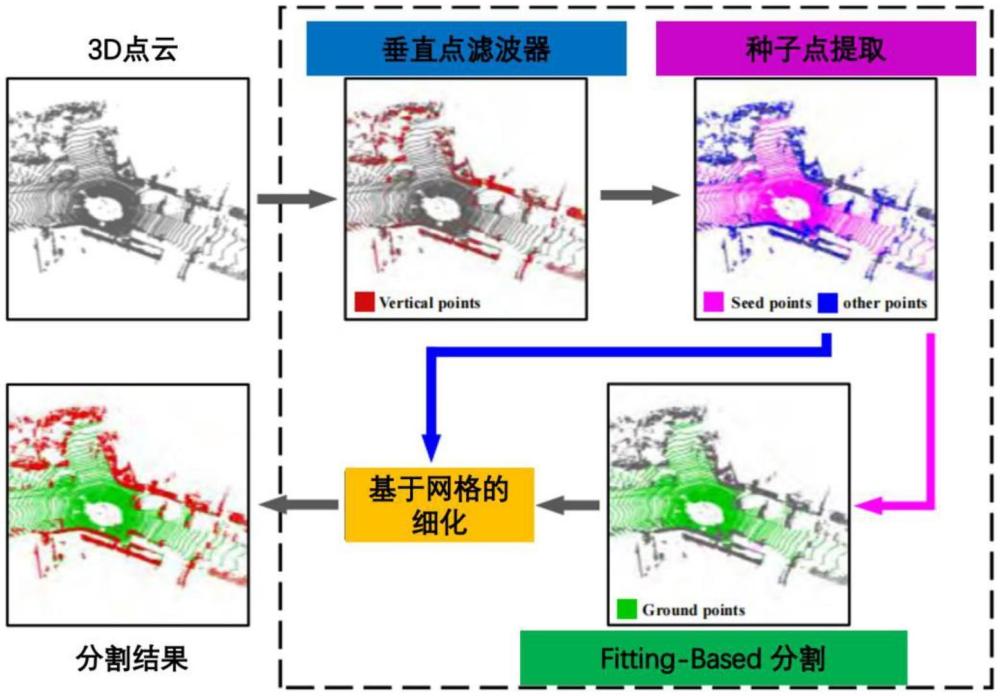
53、本发明的有益效果:本发明的一种基于拟合的地面目标分割方法通过垂直点滤波器(vpf)和种子点提取(spe)的联合使用,有效减少了噪声数据的影响,在此基础上,改进了种子点选取的质量,从而改善了地表拟合精度;基于网格的细化(gbr)能够对初步拟合得到的粗分割结果进行细化,解决了部分分割不足的问题,确保了最终分割结果的完整性;整体框架的设计考虑到了不同场景下的复杂性和变化性,通过多步骤的处理流程增强了算法对噪声和复杂环境的适应能力;通过预先过滤和基于网格的处理,大大减少了数据处理量,从而提高了算法的整体效率。
- 还没有人留言评论。精彩留言会获得点赞!