基于空间定位分析的AR数字望远镜方位角生成方法与流程
本技术涉及增强现实相关领域,尤其涉及基于空间定位分析的ar数字望远镜方位角生成方法。
背景技术:
1、在增强现实(ar)技术的快速发展中,ar数字望远镜作为一种创新的交互设备,为用户提供了前所未有的沉浸式体验。这类设备不仅结合了传统望远镜的远距离观测功能,还融入了ar技术,使得用户能够在观测的同时获取到丰富的数字信息。然而,在ar应用中,一个关键的技术挑战是如何准确地将用户通过ar数字望远镜观察到的目标图像与现实世界中的实际位置相对应,即确定目标图像在现实世界中的精确方位。目前,在增强现实应用中,确定目标图像方位角的方法主要依赖于单一的图像识别技术,这种方法通过比对目标图像与预存图像库中的图像,寻找最相似的匹配项,并据此推断目标图像的大致位置和方向。然而,单一的图像识别技术容易受到光照条件、视角变化、图像质量等因素的影响,导致匹配结果不够精确,进而影响到方位角的计算精度。
2、现阶段相关技术中,ar数字望远镜方位角生成方法存在计算精度不高的技术问题。
技术实现思路
1、本技术通过提供基于空间定位分析的ar数字望远镜方位角生成方法,采用利用高精度的空间定位系统实时获取ar数字望远镜在地球坐标系中的精确位置和姿态信息,通过ar数字望远镜的图像采集设备捕获目标图像,并进行预处理,对预处理后的目标图像进行特征提取,得到目标特征描述符,同时,获取目标场景的全景图并进行特征提取,得到全景特征描述符,通过特征匹配算法找到两者之间的匹配点,根据匹配点在全景图中的地球坐标系位置,结合ar数字望远镜的位置和姿态信息,通过空间几何计算,最终得到目标图像的精确方位角等技术手段,达到了提高方位角计算的准确性的技术效果。
2、本技术提供基于空间定位分析的ar数字望远镜方位角生成方法,包括:
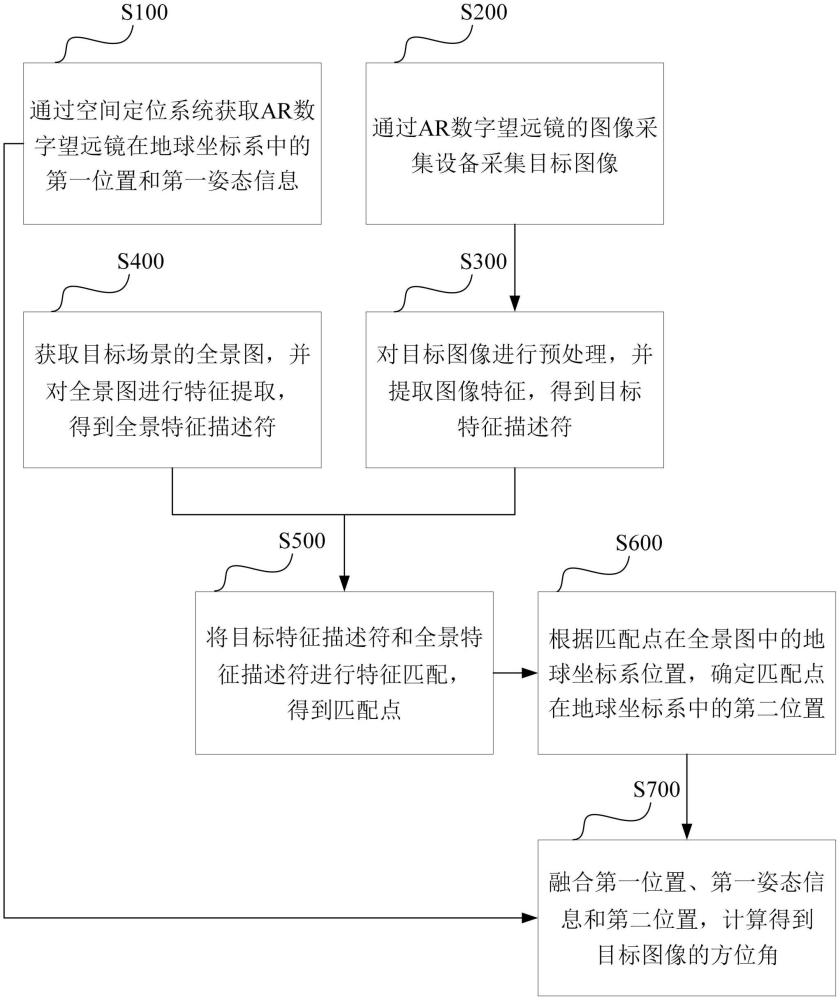
3、通过空间定位系统获取所述ar数字望远镜在地球坐标系中的第一位置和第一姿态信息;通过ar数字望远镜的图像采集设备采集目标图像;对所述目标图像进行预处理,并提取图像特征,得到目标特征描述符;获取目标场景的全景图,并对所述全景图进行特征提取,得到全景特征描述符;将所述目标特征描述符和所述全景特征描述符进行特征匹配,得到匹配点;根据所述匹配点在全景图中的地球坐标系位置,确定所述匹配点在地球坐标系中的第二位置;融合所述第一位置、第一姿态信息和第二位置,计算得到所述目标图像的方位角。
4、在可能的实现方式中,执行以下处理:
5、所述第一姿态信息包括ar数字望远镜的俯仰角、偏航角和翻滚角。
6、在可能的实现方式中,所述融合所述第一位置、第一姿态信息和第二位置,计算得到所述目标图像的方位角,执行以下处理:
7、确定所述第一位置和第二位置之间的基础方向向量;将所述第一姿态信息中的俯仰角、偏航角和翻滚角转换为旋转矩阵;将所述基础方向向量与所述旋转矩阵进行融合,得到校正方向向量;利用球面三角学计算所述校正方向向量相对于地理北方的角度,得到所述目标图像的方位角。
8、在可能的实现方式中,执行以下处理:
9、所述目标图像的方位角计算公式如下:α'=arctan2(vy”,vx”)+δαdynamic;其中,α'是目标图像的方位角,vy”,vx”分别是所述校正方向向量v”在笛卡尔坐标系中的x和y分量,δαdynamic是传感器的动态误差修正因子;所述校正方向向量v”的计算公式如下:v”=r×v',其中,r是所述旋转矩阵,v'是修正方向向量;所述旋转矩阵r的计算公式如下:其中,是偏航角绕z轴的旋转矩阵,是翻滚角绕y轴的旋转矩阵,是俯仰角绕x轴的旋转矩阵,的旋转矩阵如下:
10、所述修正方向向量v'的计算公式如下:其中,v是所述基础方向向量,δr是基于wgs84椭球模型的椭球半径误差校正量,是地球表面的法向量,δh是第一位置和第二位置的高度差,是高度方向的单位向量;所述基础方向向量v的计算公式如下:v=(x2-x1,y2-y1,z2-z1),其中,x1,y1,z1是第一位置的笛卡尔坐标,x2,y2,z2是第二位置的笛卡尔坐标。
11、在可能的实现方式中,所述对所述目标图像进行预处理,并提取图像特征,得到目标特征描述符,执行以下处理:
12、对所述目标图像进行噪声去除、对比度增强、边缘增强和尺度归一化预处理,得到标准目标图像;对所述标准目标图像进行自适应特征提取,得到所述目标特征描述符。
13、在可能的实现方式中,所述对所述标准目标图像进行自适应特征提取,得到所述目标特征描述符,执行以下处理:
14、分别基于lbp算法、sift算法、canny算法和refinenet模型,构建纹理特征提取通道、角点特征提取通道、边缘特征提取通道和高级语义特征提取通道;将纹理特征提取通道与角点特征提取通道、边缘特征提取通道、高级语义特征提取通道中的任意一个组合,构建第一特征提取通道,将纹理特征提取通道与角点特征提取通道、边缘特征提取通道、高级语义特征提取通道中的任意两个组合,构建第二特征提取通道,将纹理特征提取通道与角点特征提取通道、边缘特征提取通道、高级语义特征提取通道组合,构建第三特征提取通道;将所述第一特征提取通道、第二特征提取通道和第三特征提取通道并行连接,构建自适应特征提取通道;通过所述自适应特征提取通道,对所述标准目标图像进行特征提取,得到所述目标特征描述符。
15、在可能的实现方式中,所述通过所述自适应特征提取通道,对所述标准目标图像进行特征提取,得到所述目标特征描述符,执行以下处理:
16、对所述标准目标图像进行评价,生成目标图像评价结果;构建特征提取通道自适应映射链路;根据所述目标图像评价结果,从所述特征提取通道自适应映射链路映射提取目标适应关系;基于所述目标适应关系,从所述自适应特征提取通道中调用目标特征提取通道,对所述标准目标图像进行特征提取,得到所述目标特征描述符。
17、在可能的实现方式中,所述构建特征提取通道自适应映射链路,执行以下处理:
18、获取所述目标场景的第一样本图像,对所述第一样本图像进行评价,生成第一样本图像评价结果;将所述第一样本图像输入三种特征提取通道分别进行特征提取,得到多个特征提取结果;对所述多个特征提取结果进行评分,建立评分极大值对应的特征提取通道与所述第一样本图像评价结果之间的第一适应关系;获取所述目标场景的多个样本图像,根据所述多个样本图像建立多个图像评价结果与多个评分极大值对应的特征提取通道之间的多个适应关系;对所述多个适应关系进行聚类,构建特征提取通道自适应映射链路。
19、拟通过本技术提出的基于空间定位分析的ar数字望远镜方位角生成方法,首先通过空间定位系统获取ar数字望远镜在地球坐标系中的第一位置和第一姿态信息,然后通过ar数字望远镜的图像采集设备采集目标图像,接着对目标图像进行预处理,并提取图像特征,得到目标特征描述符,同样地,获取目标场景的全景图,并对全景图进行特征提取,得到全景特征描述符,进而将目标特征描述符和全景特征描述符进行特征匹配,得到匹配点,再根据匹配点在全景图中的地球坐标系位置,确定匹配点在地球坐标系中的第二位置,最后融合第一位置、第一姿态信息和第二位置,计算得到目标图像的方位角,达到了提高方位角计算的准确性的技术效果。
- 还没有人留言评论。精彩留言会获得点赞!