一种辅助车辆变道和横向位置的定位方法及装置与流程
本发明涉及计算机应用,具体为一种辅助车辆变道和横向位置的定位方法及装置。
背景技术:
1、近年来,随着交通条件的改善和对驾驶安全需求的提升,实时提供车辆的横向位置信息在辅助驾驶和高级驾驶辅助系统中显得尤为重要。这种信息可以帮助车辆根据所在车道,结合地图数据优化行驶路线。尤其是在高速公路的非出入口区域,准确提供车辆的横向位置信息,不仅可以辅助车辆快速变道,还能避免错过高速公路出口。
2、目前在高速主干道场景下车辆定位主要通过车道级地图或高精地图定位来确定车辆位置,但普通地图现仍得不到准确的车辆位置信息。其中,专利申请号为cn201710487137.8和cn201811393431.3,其主要通过深度学习算法为基础进行可行驶区域检测,对于低性能车机而言,复杂的网络结构和庞大的参数量算法很难实时运行且占用大量内存资源。为此,提出了一种辅助车辆变道和横向位置的定位方法及装置。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明的一个目的在于提出一种辅助车辆变道和横向位置的定位方法及装置。
2、为实现上述目的,本发明提供如下技术方案:
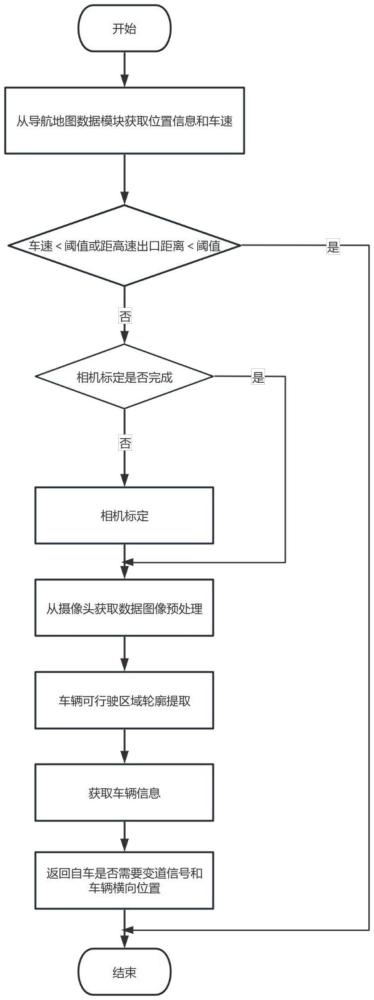
3、一种辅助车辆变道和横向位置的定位方法,包括以下步骤:
4、s1.从导航模块获取车辆位置信息和车速;
5、s2.进行相机内参标定和相机外参标定;
6、s3.从摄像头获取图像数据预处理;
7、s4.提取车辆可行驶区域轮廓;
8、s5.获取车辆的相关信息;
9、s6.确定车辆可变道信号和车辆横向位置。
10、作为本发明的进一步优化方案,在步骤s2中,对于相机内参标定,通过kalibr标定工具或opencv进行标定,使用内参标定获取图像坐标系中x方向和y方向焦距fx,fy;
11、光心坐标为cx,cy从而得到相机内参矩阵m1=[fx,0,cx;0,fy,cy;0,0,1],同时,通过相机内参标定获取畸变系数畸变数学模型的5个参数d=(k1,k2,p1,p2,k3);
12、对于相机外参标定,选取摄像头位置在地面投影点为原点,按右手坐标系,水平向右为x轴正方向,车辆行驶方向为y轴正方向,z轴垂直地面向上为正方向,通过灭点计算相机外参数矩阵m2,同时,标定摄像头距离左侧车轮的横向距离sl和摄像头距离右侧车轮的横向距离s2,相机到地面高度h。
13、作为本发明的进一步优化方案,在步骤s4中,对于segformer模型decoder阶段修改,首先对不同层的feature分别经过linear层且确保channel维度相同,其次均反卷积到原分辨率并加权平均,再用一个linear层融合,应用1x1卷积核进行卷积来减少卷积核参数简化模型,最后一个linear层预测结果;
14、
15、
16、
17、fconv=conv1×1(f),
18、m=linear(c,ncls)(fconv)
19、作为本发明的进一步优化方案,在步骤s4中,对于segformer模型损失函数的修改,表示为:
20、ljoint_seg=lce+lenergy
21、
22、lenergy=s*e(i,j),
23、其中:
24、其中,为归一化权重,s为权重超参数,d表示图像i的空间像素位置,g是一个实质上的高斯核过滤器。
25、作为本发明的进一步优化方案,在步骤s4中,对于可行驶区域轮廓分割,首先对图像进行预处理,加载segformer模型和权重,根据损失函数并采用adam优化器,在训练的过程中调整超参数以提高模型性能,最后应用训练好的改进segformer模型加载步骤s3中部分预处理后的图像进行可行驶区域轮廓分割。
26、作为本发明的进一步优化方案,在步骤s4中,对于可行驶区域轮廓后处理,具体步骤为:
27、s401.基于douglas-peucker算法中的opencv对应函数为approxpolydp对可行驶区域轮廓点进行多边形拟合,得到多边形点集;
28、s402.遍历多边形点集并查询符合条件的第一个点且按照一定顺序重新存储多边形点集;
29、s403.当多边形点集合个数小于阈值时将所有多边形点集作为可行驶区域轮廓关键点,否则,基于重新存储的多边形点集进行关键点选择;
30、s404.对于可行驶区域轮廓关键点的选择,每次取三个点分别为当前点和当前点后第二个点及三个点,并分别与当前点计算欧式距离、横向距离、纵向距离,将欧式距离、横向距离、纵向距离与设定阈值做比较,确定关键点选择的遍历步长并将符合条件的点作为关键点存储;
31、s405.基于上述关键点获根据相邻两点的斜率、水平距离、垂直距离和欧式距离及关键点横坐标与阈值做比较,来确定可行驶区域轮廓左边界点集和右边界点集合;
32、s406.基于斜率和底边界交点特征进一步优化边界点集得到最优边界点集,优化后的点集包括边界的顶端点和低端点,并将顶点和低端点转回原图坐标,基于相机标定的内参矩阵和外参矩阵转化为世界坐标系中坐标,并计算可行度。
33、作为本发明的进一步优化方案,在步骤s5中,基于语义分割网络改进后的segformer提取自车周围的其他移动物体,筛选出自车车道前后或相邻左右车道最近的移动障碍物,根据相机内参矩阵m1和外参矩阵m2和畸变矩阵d,将障碍物的距离自车的像素坐标转换成世界坐标系中的实际距离。
34、作为本发明的进一步优化方案,在步骤s6中,对于确定车辆横向位置,首先根据步骤s4中获取的可行驶区域边界,分别比较左右边界的置信度和设定阈值比较,当置信度大于阈值时,计算对应边界的横坐标均值s,并根据所在道路的车道宽度wd推算车辆位置为对应可行驶区域边界的第floor(s/wd)+条车道,其中floor为向下取整操作。
35、作为本发明的进一步优化方案,在步骤s6中,对于确定车辆可变道信号,根据步骤s4中获取的可行驶区域边界,左右边界的置信度分别和设定阈值比较,当置信度大于阈值时,计算对应边界的横坐标均值s1,根据步骤s5中的车道线参数方程参数方程,分别采样数个点计算对应横坐标的均值s2;
36、计算公式为:d=abs(s1-s2),其中abs()为取绝对值运算。
37、一种辅助车辆变道和横向位置的定位装置,包括:
38、存储器,用于存储计算机程序;
39、处理器,用于执行所述计算机程序时实现如辅助车辆变道和横向位置定位方法的步骤。
40、与现有技术相比,本发明的有益效果是:
41、本发明通过导航和gps模块获得车辆当前位置信息和速度,当检测到车辆在非高速出入口区域且车速大于阈值时,进入可行驶区域检测功能,通过获取的可行驶区域轮廓并最终获得可行驶区域的左右边界,基于相机外参标定信息,将自车距离可行驶区域左右边界的横向像素转化为距离,一方面,可根据自车到左右可行驶区域边界的距离确定车辆的横向位置;另一方面,通过获取自车所在车道线信息和可行驶区域轮廓边界作比较并基于周围车辆信息确定是否可以变道。通过轻量级模型、实时图像处理和相机标定技术,实现了在低性能车机上实时、准确地进行车辆横向位置定位和可变道判断。
- 还没有人留言评论。精彩留言会获得点赞!