一种基于深度学习的无人机数据故障识别方法及相关设备
本技术属于无人机控制,尤其涉及一种基于深度学习的无人机数据故障识别方法及相关设备。
背景技术:
1、为了推动大型无人机的高速发展,实现智能自主与安全飞行,还需要克服众多困难与挑战,其中之一就是飞行数据的智能识别问题。目前,大型无人运输机存在飞行状态评估可靠性低、故障识别准确性较低与表决不及时等问题。
2、由于无人机的系统结构复杂,分系统设备众多,一旦某设备发生故障,且并未及时识别该故障,就会错过处理故障的最佳时机,导致故障升级从而造成飞行事故,造成无法挽回的重大损失。
3、目前无人机故障识别方法主要可以分为基于系统模型的方法、基于知识的方法和基于数据的方法。考虑无人运输机存在模型强耦合、强非线性、高动态、强不确定性等特点,基于系统模型的方法变得十分困难且可靠性低。基于知识的方法虽然不需要依赖精确的数学模型,但是该方法的准确性很大程度上取决于知识库的质量,存在较大的局限性。基于数据的方法是指利用机器学习等技术对复杂多源传感器数据进行解析,实现对无人机的故障识别,但常规无人机故障识别方法易受噪声干扰,难以捕捉数据的关键特征,从而导致无人机数据故障识别的准确率较低。
技术实现思路
1、本技术提供了一种基于深度学习的无人机数据故障识别方法及相关设备,可以解决无人机数据故障识别的准确率较低的问题。
2、第一方面,本技术提供了一种基于深度学习的无人机数据故障识别方法,包括:
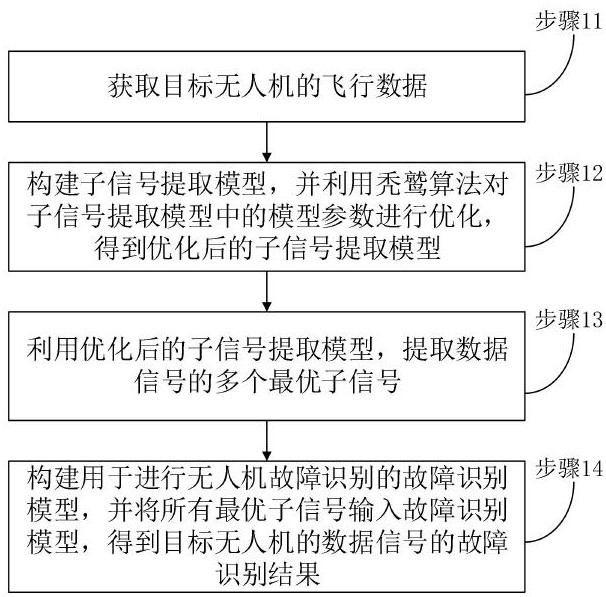
3、获取目标无人机的飞行数据;飞行数据为目标无人机上传感器采集的用于描述目标无人机飞行状态的数据信号;
4、构建子信号提取模型,并利用秃鹫算法对子信号提取模型中的模型参数进行优化,得到优化后的子信号提取模型;子信号提取模型用于将数据信号分解为多个子信号,子信号用于描述数据信号的数据特征;
5、利用优化后的子信号提取模型,提取数据信号的多个最优子信号;
6、构建用于进行无人机故障识别的故障识别模型,并将所有最优子信号输入故障识别模型,得到目标无人机的数据信号的故障识别结果;故障识别模型包括第一自注意力层、第二自注意力层、第三自注意力层、加法层、lstm层、全连接层、softmax层以及分类层,第一自注意力层、第二自注意力层以及第三自注意力层的输入端均用于接收多个最优子信号,第一自注意力层、第二自注意力层以及第三自注意力层的输出端均连接加法层的输入端,加法层的输出端连接lstm层的输入端,lstm层的输出端连接全连接层的输入端,全连接层的输出端连接softmax层的输入端,softmax层的输出端连接分类层的输入端,分类层的输出端输出数据信号的故障识别结果。
7、可选的,子信号提取模型的表达式如下:
8、
9、
10、
11、其中,表示第个子信号,,表示分解的子信号的总个数,为待优化的模型参数,表示第个子信号的中心频率,表示拉格朗日算子,表示惩罚因子,为待优化的模型参数,表示对时间t求偏导数,表示狄拉克函数,表示时间原点处的冲激信号,表示虚数单位,表示时间,表示复指数,表示原始信号,表示正则化参数,表示第个子信号在频域的表示,,表示第个子信号在第次迭代中的频域表示,,表示迭代次数,表示原始信号的频域表示,表示正则化参数的频域表示,表示频率,表示第次迭代的模态的中心频率,表示微分。
12、可选的,利用秃鹫算法对子信号提取解模型中的模型参数进行优化,包括:
13、步骤i,构建惩罚因子和子信号的总个数对应的初始种群;初始种群包括多个种群个体,每个种群个体为和组成的行向量,不同种群个体对应的行向量互不相同;
14、步骤ii,分别计算初始种群中每个种群个体的适应度值,并根据适应度值,从多个种群个体中确定参与计算的最优个体;
15、步骤iii,计算最优个体的饥饿率,根据饥饿率确定初始种群的个体更新策略,并根据个体更新策略对初始种群进行更新,得到中间种群;个体更新策略包括第一个体更新策略、第二个体更新策略以及第三个体更新策略,不同个体更新策略对应的饥饿率范围互不相同;
16、步骤iv,若中间种群满足预设更新终止条件,则将中间种群中最优个体对应的模型参数作为最优模型参数,根据最优模型参数对子信号提取模型进行优化,得到优化后的子信号提取模型;否则,将中间种群作为步骤ii中的初始种群,返回执行步骤ii。
17、可选的,若饥饿率的绝对值大于1,则确定采用第一个体更新策略对初始种群进行更新;若饥饿率的绝对值小于1,且饥饿率的绝对值大于0.5,则确定采用第二个体更新策略对初始种群进行更新;若饥饿率的绝对值小于0.5,则确定采用第三个体更新策略对初始种群进行更新;
18、采用第一个体更新策略对初始种群进行更新,包括:
19、分别针对初始种群中的每个种群个体,通过计算公式
20、 ;
21、得到种群个体更新后的位置;其中,表示种群代数,表示第代种群的最优个体,表示种群个体与最优个体之间的距离,f表示饥饿率,表示0至1之间的随机数,表示探索阶段选择不同更新策略的概率,表示介于0到1之间的随机数,表示寻优的上边界,表示寻优的下边界,表示介于0到2之间的随机数,表示种群个体更新前的位置;
22、采用第二个体更新策略对初始种群进行更新,包括:
23、分别针对初始种群中的每个种群个体,通过计算公式
24、
25、得到种群个体更新后的位置;其中,表示介于0到1之间的随机数,表示当前个体与当前迭代过程中所选择参与计算的最优个体之间的距离,表示开发第一阶段选择不同更新策略的概率,和均表示中间参数。
26、采用第三个体更新策略对初始种群进行更新,包括:
27、分别针对初始种群中的每个种群个体,通过计算公式
28、
29、得到种群个体更新后的位置;其中,表示和均表示中间参数,表示0至1之间的随机数,表示开发第二阶段选择不同更新策略的概率,表示当前种群中的最优个体,表示当前种群中的次优个体,表示莱维飞行策略,表示优化变量的维度,表示介于0到1之间的随机数,表示参数,表示可调节参数,默认值为1.5。
30、第二方面,本技术提供了一种基于深度学习的无人机数据故障识别装置,包括:
31、数据获取模块,用于获取目标无人机的飞行数据;飞行数据为目标无人机上传感器采集的用于描述目标无人机飞行状态的数据信号;
32、模型构建模块,用于构建子信号提取模型,并利用秃鹫算法对子信号提取模型中的模型参数进行优化,得到优化后的子信号提取模型;子信号提取模型用于将数据信号分解为多个子信号,子信号用于描述数据信号的数据特征;
33、信号分解模块,用于利用优化后的子信号提取模型,提取数据信号的多个最优子信号;
34、故障识别模块,用于构建用于进行无人机故障识别的故障识别模型,并将所有最优子信号输入故障识别模型,得到目标无人机的数据信号的故障识别结果;故障识别模型包括第一自注意力层、第二自注意力层、第三自注意力层、加法层、lstm层、全连接层、softmax层以及分类层,第一自注意力层、第二自注意力层以及第三自注意力层的输入端均用于接收多个最优子信号,第一自注意力层、第二自注意力层以及第三自注意力层的输出端均连接加法层的输入端,加法层的输出端连接lstm层的输入端,lstm层的输出端连接全连接层的输入端,全连接层的输出端连接softmax层的输入端,softmax层的输出端连接分类层的输入端,分类层的输出端输出数据信号的故障识别结果。
35、第三方面,本技术提供了一种终端设备,包括存储器、处理器以及存储在存储器中并可在处理器上运行的计算机程序,处理器执行计算机程序时实现上述的基于深度学习的无人机数据故障识别方法。
36、第四方面,本技术提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,计算机程序被处理器执行时实现上述的基于深度学习的无人机数据故障识别方法。
37、本技术的上述方案有如下的有益效果:
38、本技术提供的基于深度学习的无人机数据故障识别方法,通过构建子信号提取模型,对子信号提取模型进行优化,再利用优化后的子信号提取模型提取飞行数据的最优子信号,可以提高最优子信号提取的准确性,并降低多个子信号带来的噪声的干扰,从而提高无人机故障识别的准确性;构建的故障识别模型基于最优子信号进行故障识别,能够输出准确的无人机数据故障识别结果。
39、本技术的其它有益效果将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!