车载摄像头附着物检测方法、系统和终端与流程
本技术属于汽车自动驾驶,具体涉及一种车载摄像头附着物检测方法、系统和终端。
背景技术:
1、随着自动驾驶技术和高级驾驶辅助系统(adas)的快速发展,车辆对于周围环境的感知能力变得至关重要。车载摄像头作为感知系统的关键组成部分,其提供的视频数据质量直接影响到系统的决策准确性和行车安全。然而,车载摄像头镜头表面可能会因雨水、雪、冰、灰尘、昆虫残留或其他污染物的附着而导致视野模糊或遮挡,从而影响数据的清晰度和准确性。因此,及时检测并处理这些附着物是确保摄像头正常工作,进而保障自动驾驶和adas系统性能的重要前提。
2、传统的车载摄像头附着物检测方法通常依赖于图像处理技术,如边缘检测、模糊检测等来识别图像中的异常。这些方法在静态或控制环境下或许可行,但在实际应用中面临多重挑战。首先,这些方法往往需要对每一帧图像进行复杂的计算和模型分析,这不仅消耗大量的计算资源,而且难以实现实时性,不适用于需要快速响应的嵌入式系统。其次,传统方法在区分正常场景变化(如天气变化、光照变化)与附着物引起的异常变化时存在困难,容易受到环境因素的影响,导致误报或漏报。此外,对于动态变化的驾驶环境,如高速移动的车辆和不断变化的背景,传统检测方法的稳定性和准确性也会大打折扣。
技术实现思路
1、本技术的目的在于提供一种车载摄像头附着物检测方法、系统和终端,用于提高车载摄像头附着物检测的速度和准确性,同时降低对计算资源的需求。
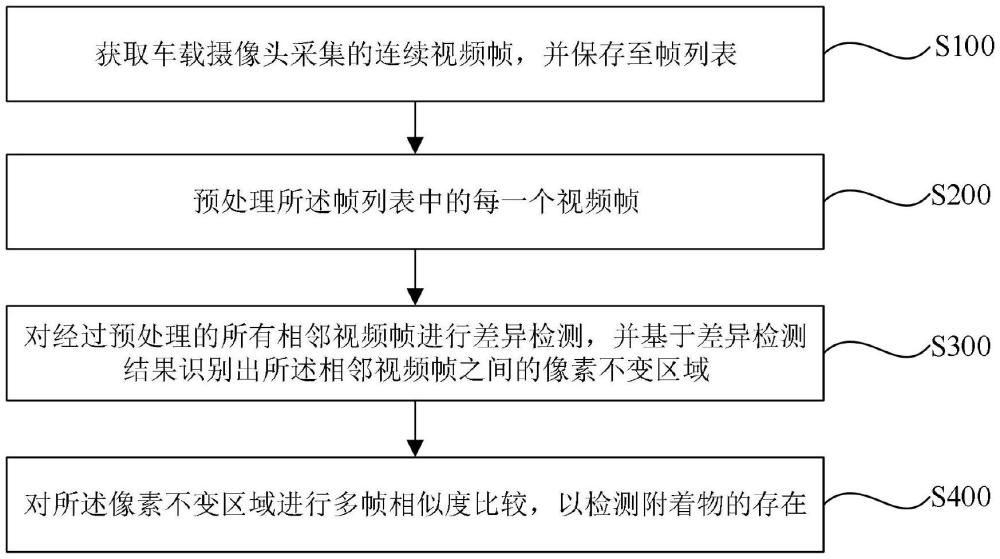
2、第一方面,本技术提供一种车载摄像头附着物检测方法,包括:获取车载摄像头采集的连续视频帧,并保存至帧列表;预处理所述帧列表中的每一个视频帧;对经过预处理的所有相邻视频帧进行差异检测,并基于差异检测结果识别出所述相邻视频帧之间的像素不变区域;对所述像素不变区域进行多帧相似度比较,以检测附着物的存在。
3、在第一方面的一种实现方式中,获取车载摄像头采集的连续视频帧,并保存至帧列表包括:
4、当车速超过第一预设阈值时,按照预设时间间隔控制所述车载摄像头进行图像采集,以获取所述连续视频帧;
5、将所述连续视频帧依次保存到所述帧列表中。
6、在第一方面的一种实现方式中,预处理所述帧列表中的每一个视频帧包括:
7、去除所述视频帧中的由于所述车载摄像头的拍摄角度限制而采集到的静态不变区域;
8、对保留在所述视频帧中的有效区域进行灰度化处理,以将原始的彩色图像转换为灰度图像;
9、对所述灰度图像进行二值化处理,以得到黑白图像。
10、在第一方面的一种实现方式中,对经过预处理的所有相邻视频帧进行差异检测,并基于差异检测结果识别出所述相邻视频帧之间的像素不变区域包括:
11、计算每组所述相邻视频帧之间对应位置像素的绝对差值;
12、判断所述绝对差值是否大于第二预设阈值;
13、若是,则将相应像素所在位置标记为像素变化区域;
14、否则将相应像素所在位置标记为像素不变区域。
15、在第一方面的一种实现方式中,对所述像素不变区域进行多帧相似度比较,以检测附着物的存在包括:
16、构建所有所述相邻视频帧之间的像素不变区域的轮廓集合,并将所述轮廓集合依次加入到像素不变区域面积列表;
17、计算所述像素不变区域面积列表中的相邻两个轮廓集合之间的相似度,并基于所述相似度计算结果检测所述附着物的存在。
18、在第一方面的一种实现方式中,构建所述相邻视频帧之间的像素不变区域的轮廓集合,并将所述轮廓集合依次加入到像素不变区域面积列表包括:
19、提取所述像素不变区域的轮廓;
20、获取所述轮廓的坐标信息以及面积;
21、判断是否存在面积大于第三预设阈值的轮廓;
22、若是,则组合所有面积大于第三预设阈值的轮廓,以构成轮廓集合li[li1,li2,…,lin],并将所述轮廓集合li[li1,li2,…,lin]加入到像素不变区域面积列表,其中lin表示第i组所述相邻视频帧之间第n个面积大于第三预设阈值的所述像素不变区域的轮廓,i∈[1,n-1],n为所述帧列表的长度,n和n均为自然数;
23、否则基于下一组所述相邻视频帧构建所述像素不变区域的轮廓集合li[li1,li2,…,lin]。
24、在第一方面的一种实现方式中,还包括:判断所述像素不变区域面积列表的长度是否超过第四预设阈值;若是,则移除最早加入所述像素不变区域面积列表的所述轮廓集合;否则基于下一组所述相邻视频帧构建所述像素不变区域的轮廓集合,直至所述像素不变区域面积列表的长度达到所述第四预设阈值。
25、在第一方面的一种实现方式中,计算所述像素不变区域面积列表中的相邻两个轮廓集合之间的相似度,并基于所述相似度计算结果检测所述附着物的存在包括包括:
26、基于所述轮廓的坐标信息,对所述相邻的两个轮廓集合中的轮廓进行一致性匹配,以得到若干个相互匹配的轮廓对;
27、计算每个所述轮廓对中的轮廓之间的相似度;
28、判断所述相似度是否连续q次大于第五预设阈值,其中q为自然数;
29、若是,则判定所述车载摄像头上存在附着物;
30、否则判定所述车载摄像头上不存在附着物。
31、第二方面,本技术提供一种车载摄像头附着物检测系统,包括:视频帧获取模块,用于获取车载摄像头采集的连续视频帧,并保存至帧列表;预处理模块,用于预处理所述帧列表中的每一个视频帧;差异检测模块,用于对经过预处理的所有相邻视频帧进行差异检测,并基于差异检测结果识别出所述相邻视频帧之间的像素不变区域;相似度比较模块,用于对所述像素不变区域进行多帧相似度比较,以检测附着物的存在。
32、第三方面,本技术提供一种终端,包括:处理器及存储器;所述存储器用于存储计算机程序;所述处理器用于执行所述存储器存储的计算机程序,以使所述终端执行上述任一项所述的车载摄像头附着物检测方法。
33、如上所述,本技术所述的车载摄像头附着物检测方法、系统和终端,具有以下有益效果:
34、(1)高精度检测:本技术利用连续视频帧之间的动态差异,并结合对像素不变区域的多帧相似度比较,能够有效区分正常的环境变化和由附着物引起的异常变化。即使在复杂的动态环境中,也能保持较高的准确率,从而显著提升了检测的准确性。
35、(2)实时性强:本技术的检测方法简单高效,支持车辆行驶中的实时检测,并能迅速响应附着物的存在。
36、(3)鲁棒性高:本技术对于各种环境变化表现出良好的适应能力。无论是在光照变化、不同天气条件(例如雨天或雪天),还是复杂的交通场景下,都能维持较高的性能水平。
37、(4)低成本实现:本技术仅依赖车载摄像头的视频帧数据,无需额外的传感器设备,不仅显著降低了系统硬件成本,同时也简化了系统设计及维护工作。
38、(5)高可靠性:本技术能够有效保障车载摄像头视野的清晰度,确保自动驾驶系统和高级驾驶辅助系统(adas)的正确感知和决策,减少事故风险,提升了整体行车安全性。
- 还没有人留言评论。精彩留言会获得点赞!