一种基于轮廓矢量配准的建筑物高程估计方法
本技术涉及摄影测量与遥感,尤其涉及一种基于轮廓矢量配准的建筑物高程估计方法。
背景技术:
1、城市建筑物的高度信息作为基础数据与重要参数,可以从侧面反映城市的纵向信息。目前,建筑物的高度主要通过传统测绘方法和基于遥感技术的测量方法测量得到。
2、其中,传统测绘方法包括全站仪测量、gps测量和激光扫描测量等,这种方式的技术成熟且测量精度高,但是测量成本高、耗时长,对人员的经验和设备操作水平有一定要求,需要大量人力,难以满足快速测量的需求。
3、基于遥感技术的测量方法主要包括阴影长度检测法、同名点影像匹配法和密集匹配法等,与传统测绘方法相比较,这些方法具有效率高、速度快、覆盖范围广等优点。其中,阴影长度检测法可以利用单张卫星影像中建筑物阴影长度结合影像摄影时间、方位等信息来估算建筑物高度,这种方式操作简单、实施成本低,但容易受到光照条件、地形等环境因素影响,在不利于检测的环境因素影响下会产生较大误差;同名点影像匹配法可以通过匹配多视卫星影像中同名建筑物的同名像点,并根据影像几何定位参数进行前方交会计算建筑物高度,然而同名点匹配的成功率和可靠性依赖影像纹理丰富程度,而一般情况下建筑物屋顶缺乏纹理,故严重降低了该方法的成功率和可靠性;密集匹配法则利用立体影像通过密集匹配算法重建建筑物三维表面信息,该方法同样受到建筑物屋顶影像缺乏纹理的影响。
4、由此,目前缺乏一种操作简单且能够快速、简便的获取建筑物高程信息的方法。
技术实现思路
1、本技术实施例提供一种基于轮廓矢量配准的建筑物高程估计方法、装置、设备及存储介质,用以解决上述相关技术中的缺陷,所述技术方案如下:
2、第一方面,本技术实施例提供一种基于轮廓矢量配准的建筑物高程估计方法,包括:
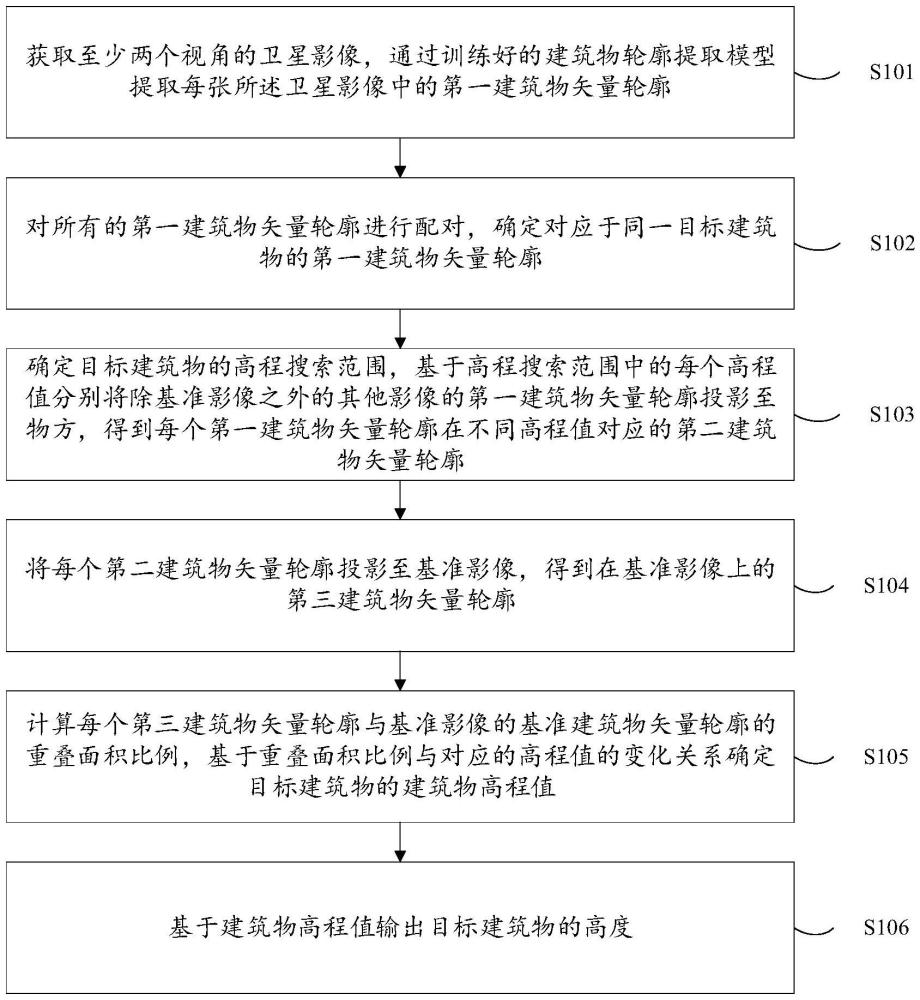
3、获取至少两个视角的卫星影像,通过训练好的建筑物轮廓提取模型提取每张所述卫星影像中的第一建筑物矢量轮廓;
4、对所有的所述第一建筑物矢量轮廓进行配对,确定对应于同一目标建筑物的第一建筑物矢量轮廓;
5、确定所述目标建筑物的高程搜索范围,基于所述高程搜索范围中的每个高程值分别将除基准影像之外的其他影像的第一建筑物矢量轮廓投影至物方,得到每个所述第一建筑物矢量轮廓在不同高程值对应的第二建筑物矢量轮廓;
6、将每个所述第二建筑物矢量轮廓投影至所述基准影像,得到在所述基准影像上的第三建筑物矢量轮廓;
7、计算每个所述第三建筑物矢量轮廓与所述基准影像的基准建筑物矢量轮廓的重叠面积比例,基于所述重叠面积比例与对应的高程值的变化关系确定所述目标建筑物的建筑物高程值;
8、基于所述建筑物高程值输出所述目标建筑物的高度。
9、在第一方面的一种可选方案中,所述对所有的所述第一建筑物矢量轮廓进行配对,确定对应于同一目标建筑物的第一建筑物矢量轮廓,包括:
10、基于每个所述第一建筑物矢量轮廓的地理位置、覆盖面积、矢量节点数量以及矢量轮廓形状计算每两个所述第一建筑物矢量轮廓之间的轮廓相似性;
11、计算所述轮廓相似性大于轮廓相似性阈值的第一建筑物矢量轮廓为所述对应于同一目标建筑物的第一建筑物矢量轮廓。
12、在第一方面的一种可选方案中,所述确定所述目标建筑物的高程搜索范围,包括:
13、根据数字高程模型以及所述目标建筑物在对应的卫星影像上覆盖的地理范围,得到所述地理范围内所有格网点的高程最大值和高程最小值,基于所述高程最大值和所述高程最小值确定得到所述高程搜索范围。
14、在第一方面的一种可选方案中,所述确定所述目标建筑物的高程搜索范围之后,还包括:
15、确定所述其他影像上的预设参照点在高程取所述高程最大值时,在物方对应的第一地面点,以及在高程取所述高程最小值时在物方对应的第二地面点;
16、将所述第一地面点和所述第二地面点分别投影至所述基准影像得到对应的投影点;
17、基于所述第一地面点与所述第二地面点之间的间距和所述投影点之间的间距的比值确定得到高程步距;
18、基于所述高程步距和所述高程最小值确定所述高程搜索范围中的每个高程值。
19、在第一方面的一种可选方案中,所述基于所述高程搜索范围中的每个高程值分别将除基准影像之外的其他影像的第一建筑物矢量轮廓投影至物方,得到每个所述第一建筑物矢量轮廓在不同高程值对应的第二建筑物矢量轮廓,包括:
20、基于所述高程最小值将所述第一建筑物矢量轮廓投影至物方,得到所述第一建筑物矢量轮廓在高程最小值时对应的所述第二建筑物矢量轮廓;
21、基于所述高程最小值累加所述高程步距以更新高程值,分别基于更新后的高程值执行所述将所述第一建筑物矢量轮廓投影至物方的步骤,得到所述第一建筑物矢量轮廓在当前高程值对应的所述第二建筑物矢量轮廓。
22、在第一方面的一种可选方案中,所述计算每个所述第三建筑物矢量轮廓与所述基准影像的基准建筑物矢量轮廓的重叠面积比例,包括:
23、分别获取每个所述第三建筑物矢量轮廓与所述基准建筑物矢量轮廓的重叠面积,计算得到每个所述重叠面积占所述基准建筑物矢量轮廓的重叠面积比例;
24、确定所有所述第三建筑物矢量轮廓对应的高程值与重叠面积比例的变化关系,得到所述重叠面积比例的最大值对应的高程值,基于所述重叠面积比例的最大值对应的高程值确定得到所述目标建筑物的建筑物高程值。
25、在第一方面的一种可选方案中,所述基于所述建筑物高程值输出所述目标建筑物的高度,包括:
26、获取所述目标建筑物所在区域的水平基准面的地面高程值;
27、计算所述建筑物高程值与所述地面高程值的差值,输出所述差值为所述目标建筑物的高度。
28、第二方面,本技术实施例还提供一种基于轮廓矢量配准的建筑物高程估计装置,包括:
29、轮廓提取模块,用于获取至少两个视角的卫星影像,通过训练好的建筑物轮廓提取模型提取每张所述卫星影像中的第一建筑物矢量轮廓;
30、轮廓配对模块,用于对所有的所述第一建筑物矢量轮廓进行配对,确定对应于同一目标建筑物的第一建筑物矢量轮廓;
31、矢量配准模块,用于确定所述目标建筑物的高程搜索范围,基于所述高程搜索范围中的每个高程值分别将除基准影像之外的其他影像的第一建筑物矢量轮廓投影至物方,得到每个所述第一建筑物矢量轮廓在不同高程值对应的第二建筑物矢量轮廓;
32、所述矢量配准模块还用于将每个所述第二建筑物矢量轮廓投影至所述基准影像,得到在所述基准影像上的第三建筑物矢量轮廓;
33、高度计算模块,用于计算每个所述第三建筑物矢量轮廓与所述基准影像的基准建筑物矢量轮廓的重叠面积比例,基于所述重叠面积比例与对应的高程值的变化关系确定所述目标建筑物的建筑物高程值;
34、所述高度计算模块还用于基于所述建筑物高程值输出所述目标建筑物的高度。
35、第三方面,本技术实施例还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现本技术实施例第一方面或第一方面的任意一种实现方式提供的方法。
36、第四方面,本技术还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现本技术实施例第一方面或第一方面的任意一种实现方式提供的方法。
37、本技术一些实施例提供的技术方案带来的有益效果至少包括:
38、本技术实施例通过深度学习的方法提取并匹配多视卫星影像中的建筑物矢量轮廓,估算建筑物屋顶高程的取值范围,即所述高程搜索范围,并计算搜索高程步距,在高程搜索范围内假定建筑物的屋顶高程;进一步,利用有理函数模型将其它影像的像方建筑物轮廓投影至物方、然后将物方建筑物轮廓投影至基准影像;随后,计算投影轮廓多边形与原始基准影像对应轮廓多边形的匹配度(通过计算重叠面积比例完成),并通过高程步距改变高程值来获得匹配度最佳的高程值作为该建筑物屋顶高程;最后,用建筑物屋顶高程减去地面高程即可确定建筑物高度,从而为建筑物的三维重建提供关键数据。本技术实施例具有操作简单、计算速度快、计算精度高等优势,可以为建筑物高程信息的获取提供新思路,可以为城市三维建模提供精确的数据支撑。
- 还没有人留言评论。精彩留言会获得点赞!