一种毫米波雷达高压线探测的3D矢量重构方法与流程
本技术涉及毫米波雷达防撞的领域,尤其是涉及一种毫米波雷达高压线探测的3d矢量重构方法。
背景技术:
1、飞机在低空飞行过程中,面临各种复杂地形环境,诸如高山、峡谷、树木及高压线、电力杆和建筑物等障碍物对航行安全构成了严重威胁。由于高压线难以肉眼识别,对低空飞行器威胁最大。高压线探测3d矢量重构能提高环境感知能力,将高压线更直观地展示给飞行器,实现低空飞行器的安全航行。
2、目前的3d目标检测技术主要采用相机、激光雷达与毫米波雷达三种传感器,其中相机虽然成本较低,但受天气影响严重,激光雷达成本较高,且遇到复杂环境易出现噪点,毫米波雷达成本中等,可以穿透雨雾,检测距离较远。但基于毫米波雷达的高压线探测技术,对障碍物的显示较为简单,难以清晰地展示周围环境,为低空飞行提供精准的安全航道。
技术实现思路
1、有鉴于此,本技术提供一种毫米波雷达高压线探测的3d矢量重构方法,解决了现有技术中的问题,提高了高压线矢量重构的实时性以及高压线三维图像的真实感。
2、本技术提供的一种毫米波雷达高压线探测的3d矢量重构方法采用如下的技术方案:
3、一种毫米波雷达高压线探测的3d矢量重构方法,包括:
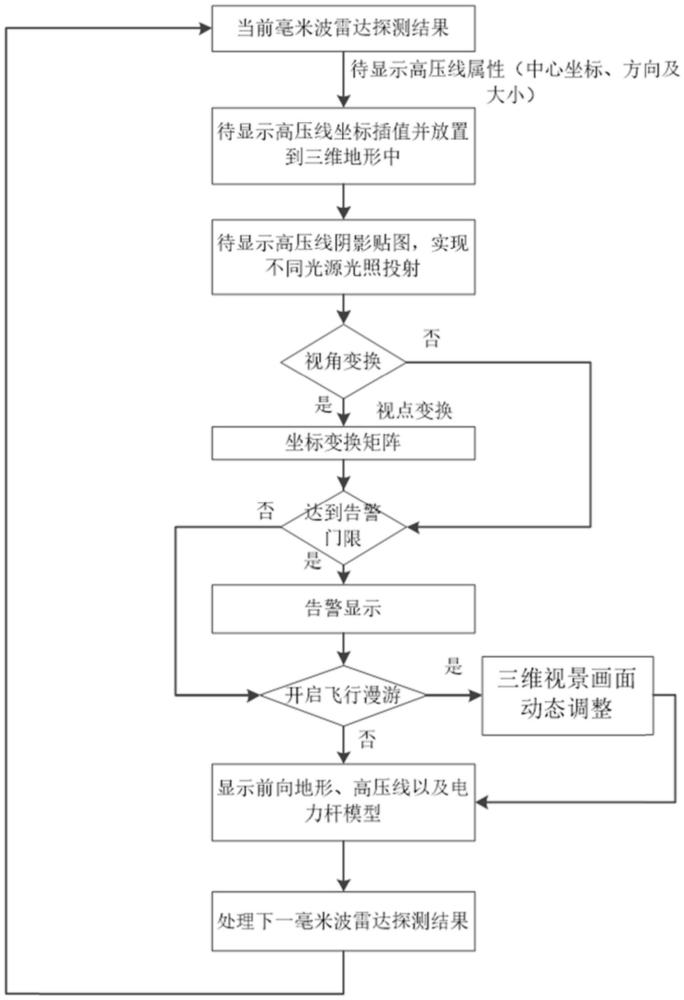
4、步骤1,读取载入毫米波雷达融合的地形探测数据,加载地形高程数据、高压线中心点坐标、高压线方向和大小信息、电力杆中心点坐标、电力杆方向和大小信息、高压线模型数据、电力杆模型数据以及视景画面显示所需的纹理数据;
5、步骤2,对当前得到的地形与高压线信息进行坐标处理:对地形高程数据分割、对地形三维顶点数据拼装、对飞行器定点数据拼装、对高压线与电力杆模型三维顶点数据拼装、计算高压线与电力杆模型三维坐标相对地形高程数据的坐标插值;
6、步骤3,根据计算的高压线三维矢量顶点数据,将高压线的不同模块赋予不同颜色值和不透明度,在视景画面中绘制出对应地形模型、飞行器模型、高压线模型以及电力杆模型,在高压线中心点坐标放置电力杆模型,根据方向信息调整电力杆与高压线方向,根据大小信息缩放电力杆与高压线,将所有模型放置到位,读取不同模型的纹理信息,进行一次渲染;
7、步骤4,对步骤3得到的图像通过阴影贴图,进行二次渲染,实现不同场景的光照投射,增强高压线与电力杆的三维图像真实性;
8、步骤5,判断是否需要进行视角变换,通过改进的矩阵变换实现模型的变换和空间坐标的改变,进而实现视角变换;
9、步骤6,判断当前高压线的威胁度,如果没有达到告警门限,将待显示高压线的信息输入到矢量重构模块,对达到告警门限的高压线设置为告警颜色;
10、步骤7,通过pcie接口或网口传入飞机飞行状态下飞行参数信息,利用飞行参数信息信息,通过视点变换,实现视场变换,完成三维视景画面的动态调整;
11、步骤8,处理下一行数据,重复步骤1至步骤7。
12、可选的,计算高压线与电力杆模型三维坐标相对地形高程数据的坐标插值的方法包括:
13、通过双线性插值的方式,计算高压线与地形最接近的4个采样点高度,根据4个采样点的高度插值计算出高压线模型坐标下的地形高度;
14、定义高压线的探测点坐标为p(x,y),高压线与地形最接近的4个采样点的坐标分别为a11(x1,y1)、a12(x2,y1)、a21(x1,y2)和a22(x2,y2);
15、根据a11(x1,y1)和a12(x2,y1)的高度值在x方向上插值计算出r1(x,y1)的高度f(r1)以及a21(x1,y2)和a22(x2,y2)的高度计算出的r2(x,y2)的高度f(r2),
16、然后通过r1(x,y1)和r2(x,y2)在y方向上插值计算最终的p(x,y)的高度值f(p),
17、可选的,所述步骤3具体包括:
18、通过pcie接口或网口接收到高压线中心点坐标、方向与大小信息,在电力杆探测点的中心点坐标放置电力杆模型,已知待显示高压线的方向为大小为α,将电力杆模型与高压线模型乘缩放矩阵r1,得到对应大小的电力杆与高压线,再将电力杆模型与高压线模型乘旋转矩阵r2,得到对应方向的电力杆与高压线,其中,矩阵r1和矩阵r2分别为:
19、
20、通过检测电力杆模型边缘最高处的最左侧、最右侧与中心点坐标,得到高压线连接点,查询高压线所在的行序号,分别连接每一行高压线;
21、最高处最左侧坐标为(xmin,ymax,zmax),最高处最右侧坐标为(xmax,ymax,zmax),最高处中心点坐标为(xmid,ymax,zmax),其中,
22、读取纹理数据对三维图像进行一次渲染。
23、可选的,所述步骤具体4包括:
24、构建一个自定义帧缓冲区,将阴影纹理附加到自定义帧缓冲区,构建变换矩阵b,从光照空间转换到纹理空间,其中矩阵b为:
25、
26、将光源视角的mvp矩阵与b矩阵相乘,得到阴影纹理矩阵shadowmvp:
27、shadowmvp=b*mvp;
28、将shadowmvp矩阵传入顶点着色器与片段着色器中的统一变量,启用阴影纹理,对已经放置的高压线与电力杆模型进行二次渲染,得到附加了阴影的高压线与电力杆三维图像。
29、可选的,所述步骤5中,如果需要进行视角变换,将视点转换到对应模型坐标系上的坐标值,直接对地形、飞行器、电力杆与高压线模型进行平移变换,对每个模型从视线方向呈现当前区域的三维视景画面;
30、已知当前视点为p0(x0,y0,z0),视角切换后视点变为pnow(xnow,ynow,znow),切换后移动步长为step,角度为β,其中:
31、
32、找到视角切换后视点pnow最接近的4个地形采样点,分别为pa(x1,y1,za),pb(x2,y1,zb),pc(x1,y2,zc),pd(x2,y2,zd),则znow通过双线性内插法求得:
33、
34、将xnow,ynow和znow分别代入地形、飞行器、电力杆与高压线模型的平移变换矩阵,实现视角切换。
35、可选的,所述步骤7具体包括:
36、定义绕着x轴的旋转为pitch角度,绕着y轴的旋转为yaw角度,绕着z轴的旋转为roll角度,通过旋转pitch、yaw、roll角度,并将视点移到预设位置,通过位置和速度得到平移矩阵为t,得到视角变换矩阵为:view=t*rroll*ryaw*rpitch;
37、已知当前视点为p0(x0,y0,z0),运动后视点变为pfly(xfly,yfly,zfly),其中,pfly=viewp0;
38、将运动后视点pfly输入平移变换矩阵,得到飞行器飞行过程中的运动画面与姿态。
39、可选的,所述步骤1中,纹理数据包括地形纹理、天空纹理、飞行器模型纹理以及高压线与电力杆纹理。
40、可选的,所述步骤7中,通过pci e接口或网口传入飞机飞行状态下的飞行参数信息包括飞行姿态、飞机位置和飞行速度,三维视景画面的动态调整包括视景画面的运动和飞机模型的姿态调整。
41、综上所述,本技术包括以下有益技术效果:
42、针对高压线三维显示不够直观的情况,本发明对高压线探测信息进行了坐标插值处理,对高压线的矢量重构、方向、大小、光照、阴影进行了处理,实时显示高压线与地形相对位置,提升了高压线三维图像的真实感。
43、针对飞行过程三维场景变换坐标转换矩阵参数复杂的情况,本技术的处理流程基于雷达与dem融合的地形数据,根据接收到的高压线探测信息,优化坐标转换流程,在屏幕坐标系上动态调整三维视景画面,实现三维场景漫游,降低了视角变换复杂度,提高了高压线矢量重构的实时性。
- 还没有人留言评论。精彩留言会获得点赞!