静态地图的生成方法、系统、电子设备及存储介质与流程
本发明涉及计算机,具体地涉及一种静态地图的生成方法、系统、电子设备及存储介质。
背景技术:
1、随着驾驶辅助系统的快速发展,驾乘人员的舒适性和安全性得到了极大的提升。但是由于驾驶辅助系统是众多主动安全系统共同构成的联合生态系统,包含预警类功能(如车道偏离预警功能、前向碰撞预警功能)和控制类功能(如车道保持辅助系统、紧急制动系统),因此在研发的不同阶段需要进行大量的测试来验证并提升功能的安全性及可靠性。
2、驾驶辅助系统在研发过程中需要进行实车测试和硬件在环仿真测试。实车测试可以更加真实地测试驾驶辅助系统的功能表现,但难以进行危险工况的测试,且在测试过程中需要测试人员手动操作车辆进行测试并记录测试过程,测试效率低且成本高。硬件在环仿真测试可以摆脱测试场景的限制,对于测试场景的设置更加灵活,可以弥补实车测试在危险工况测试的空白,且测试效率高。但是硬件在环仿真测试需要搭建大量的测试场景、以测试驾驶辅助系统在不同工况下的功能表现。
3、可见,测试地图是仿真测试的基础、地图库的质量将直接影响硬件在环仿真测试的质量。而当前,大多数的仿真测试侧重手动进行场景搭建,搭建效率低且搭建地图的质量受限于测试人员的经验,难以全面地反映真实的道路场景,因此急需找出一种地图生成方法,既可以真实、有效地体现道路特征,提高测试的覆盖度,又可以提高地图场景的生成速度。
技术实现思路
1、本发明实施例的目的是提供一种静态地图的生成方法、系统、电子设备及存储介质,用于全部或至少部分的解决上述现有技术中存在的技术问题。
2、为了实现上述目的,本发明实施例提供一种静态地图的生成方法,应用于驾驶辅助系统硬件在环仿真测试,包括:
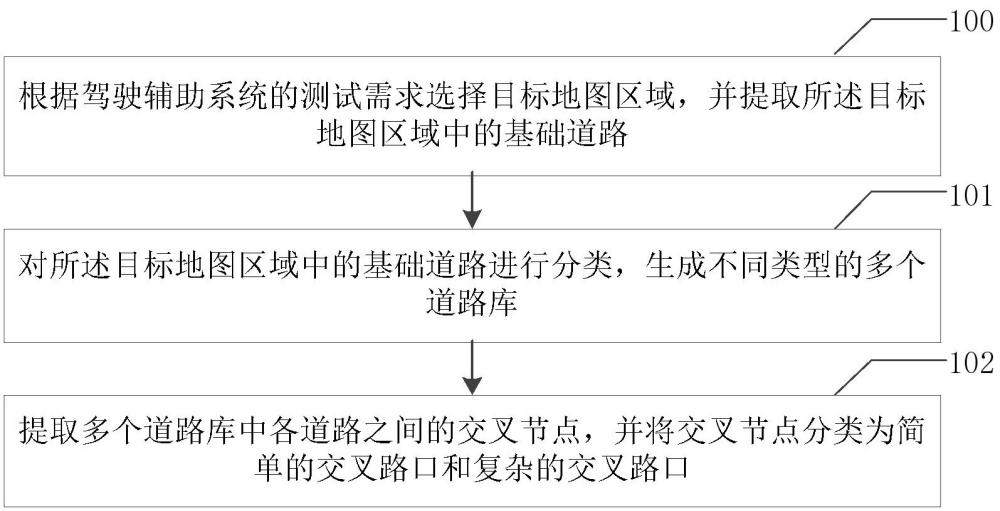
3、根据驾驶辅助系统的测试需求选择目标地图区域,并提取所述目标地图区域中的基础道路;
4、对所述目标地图区域中的基础道路进行分类,生成不同类型的多个道路库;
5、提取多个道路库中各道路之间的交叉节点,并将交叉节点分类为简单的交叉路口和复杂的交叉路口。
6、可选的,根据驾驶辅助系统的测试需求选择目标地图区域,并提取所述目标地图区域中的基础道路,包括:
7、根据驾驶辅助系统的测试需求选择目标地图区域,并从osm网站下载对应的osm地图;
8、通过仿真引擎对下载的osm地图进行读取和处理,并通过osm地图中的id信息及道路类型标签将osm地图中的所有车道提取出来;
9、遍历osm地图中的所有车道,将具有相同起点和相同终点的车道归为同一条基础道路,并将该基础道路储存在地图模板中。
10、可选的,对所述目标地图区域中的基础道路进行分类,生成不同类型的多个道路库,包括:
11、在基础道路上每隔预设距离设置一个采样点,并计算基础道路上每个采样点的航向角、航向角变化率以及该采样点沿基础道路相对于第一个采样点的距离;
12、将航向角变化率符合预设阈值的基础道路划分为直线道路和直角弯道;
13、针对除直线道路和直角弯道之外的基础道路,采用聚类的方法得到道路中弯道的数量;
14、将基础道路按照直线道路、直角弯道以及不同数量的弯道进行分类,生成不同类型的道路库。
15、可选的,针对除直线道路和直角弯道之外的基础道路,采用聚类的方法得到道路中弯道的数量,包括:
16、采用聚类的方法将所有采样点记为独立的簇,并设置转弯处相邻道路上两个采样点之间的最大距离,若转弯处相邻道路上两个采样点之间的距离大于最大距离,则确定这两个采样点属于两个不同的转弯,若转弯处相邻道路上两个采样点之间的距离小于最大距离,则确定这两个采样点属于同一个弯道;
17、遍历每一转弯处相邻道路上两个采样点之间的距离与最大距离之间的关系,得到道路中弯道的数量。
18、可选的,根据以下公式计算第i个采样点的航向角:
19、
20、式中, si[ x]是第 i个采样点的 x坐标, si+1[ x]是第 i+1个采样点的 x坐标, si[ y]是第 i个采样点的 y坐标, si+1[ y]是第 i+1个采样点的 y坐标, s表示采样点的集合。
21、可选的,根据以下公式计算航向角的变化率:
22、
23、式中, lsi表示第 i个采样点沿着基础道路距离第一个采样点的距离, lsi+1表示第 i+1个采样点沿着基础道路距离第一个采样点的距离, hsi表示第 i个采样点的航向角, hsi+1表示第 i+1个采样点的航向角, s表示采样点的集合。
24、可选的,提取多个道路库中各道路之间的交叉节点,并将交叉节点分类为简单的交叉路口和复杂的交叉路口,包括:
25、合并osm地图中的交叉路口的节点以及该节点相关的边,生成简单的交叉路口,其中,简单的交叉路口包括但不限于丁字路口、不同交叉角度的十字交叉路口;
26、提取osm地图中所有的交叉节点,设置交叉路口之间的最大间隔距离,并使用聚类方法合并交叉路口节点以及交叉节点相关的边得到复杂的交叉路口。
27、另一方面,本发明还提供一种静态地图的生成系统,应用于驾驶辅助系统硬件在环仿真测试,包括:
28、提取单元,用于根据驾驶辅助系统的测试需求选择目标地图区域,并提取所述目标地图区域中的基础道路;
29、分类单元,用于对所述目标地图区域中的基础道路进行分类,生成不同类型的多个道路库;
30、生成单元,用于提取多个道路库中各道路之间的交叉节点,并将交叉节点分类为简单的交叉路口和复杂的交叉路口。
31、另一方面,本发明还提供一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上进行运行的计算机程序,所述处理器执行所述程序时实现上述所述的静态地图的生成方法的步骤。
32、另一方面,本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述所述的静态地图的生成方法的步骤。
33、通过上述技术方案,从地图中提取基础道路、分类形成不同的道路库并生成不同的交叉路口,为驾驶辅助系统硬件在环仿真测试生成静态地图,通过在静态地图上添加其他道路参与者和道路设施完成硬件在环仿真测试,可以大大提高测试地图的搭建效率,同时生成的地图提取自真实的道路环境,更能反映真实的道路情况且覆盖度更高。
34、本发明实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!