基于多功能道路检测车的道路检测方法与流程
本发明涉及图像处理,具体涉及一种基于多功能道路检测车的道路检测方法。
背景技术:
1、随着城市化进程的加快,城市道路网络迅速扩张,交通流量不断增加,为了保证道路的安全性、舒适性和寿命,必须进行定期的道路检测和维护。传统的人工检测方法往往效率低、准确性差,且难以覆盖广泛的道路网络。因此,开发和应用多功能道路检测车成为现代道路管理和维护的需求,多功能道路检测车通过系统化、自动化的检测,能够在车辆正常行驶状态下,自动完成道路路面图像、路面形状、道路设施立体图像、平整度及道路几何参数等数据采集、分析、分类与存储,为道路附属设施的数字化管理提供有效的数据。
2、但是道路检测车在对道路检测过程中,不能自动化识别出路面污迹以及行道树荫,不利于对道路状况进行检测,导致检测效率降低,设备实用性降低的问题。
技术实现思路
1、为了解决道路检测车在对道路检测过程中,不能自动化识别出路面污迹以及行道树荫,不利于对道路状况进行检测,导致检测效率降低,设备实用性降低的技术问题,本发明的目的在于提供一种基于多功能道路检测车的道路检测方法,所采用的技术方案具体如下:
2、本发明提供一种基于多功能道路检测车的道路检测方法,应用于多功能道路检测车,所述方法包括:
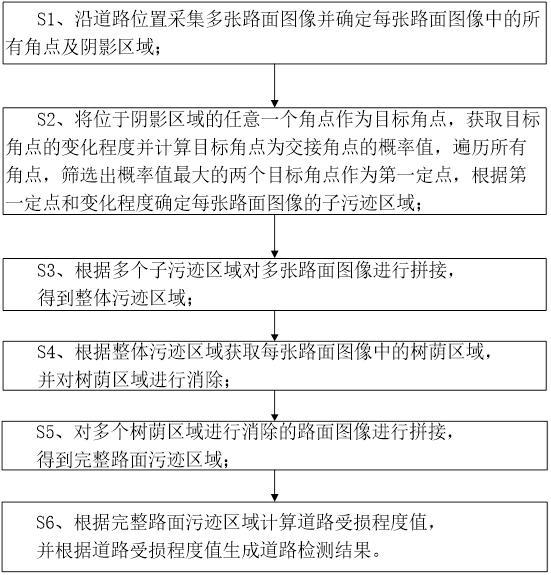
3、沿道路位置采集多张路面图像;
4、获取每张路面图像中的子污迹区域;
5、对多个子污迹区域进行拼接,得到整体污迹区域;
6、根据整体污迹区域获取每张路面图像中的树荫区域,并对树荫区域进行消除;
7、对多个树荫区域进行消除的路面图像进行拼接,得到完整路面污迹区域;
8、根据完整路面污迹区域计算道路受损程度值,并根据道路受损程度值生成道路检测结果。
9、作为优选,所述获取每张路面图像中的子污迹区域的步骤,包括:
10、对每张路面图像进行harris角点检测,得到每张路面图像中的所有角点;
11、对每张路面图像进行阈值分割,并根据阈值分割结果得到路面异常区域和路面正常区域;
12、根据预设条件获取路面异常区域中的阴影区域;
13、随机选取一张路面图像作为目标图像,并获取目标图像中位于阴影区域的任意一个角点作为目标角点,并分别构建目标角点的左侧邻域与右侧邻域,其中,左侧邻域与右侧邻域分别包括数量相同的第一角点和第二角点;
14、获取目标角点在左侧邻域中每个第一角点与相邻的第一角点之间的第一距离变化程度值;
15、获取目标角点在左侧邻域中每个第一角点与相邻的第一角点之间的第一角度变化程度值;
16、获取目标角点在右侧邻域中每个第二角点与相邻的第二角点之间的第二距离变化程度值以及每个第二角点与相邻的第二角点之间的第二角度变化程度值;
17、根据第一距离变化程度值、第一角度变化程度值计算目标角点的第一变化值;
18、根据第二距离变化程度值、第二角度变化程度值计算目标角点的第二变化值;
19、根据第一距离变化程度值、第一角度变化程度值、第二距离变化程度值、第二角度变化程度值计算目标角点属于交界角点的概率值;
20、返回所述获取目标图像中位于阴影区域的任意一个角点作为目标角点的步骤,以遍历所有角点,得到所有目标角点对应的概率值;
21、对所有概率值进行排序,将概率值最大的两个目标角点作为第一定点;
22、判断所有目标角点所对应的第一变化值、第二变化值是否均小于第一预设值;
23、若存在至少一个目标角点所对应的第一变化值、第二变化值均小于第一预设值,将小于预设值所对应的至少一个目标角点作为第二定点;
24、绘制第一定点与第二定点之间的连接线,得到目标图像的子污迹区域;
25、遍历所有路面图像,得到每张路面图像的子污迹区域。
26、作为优选,所述获取目标角点在左侧邻域中每个第一角点与相邻的第一角点之间的第一距离变化程度值的步骤,包括:
27、获取左侧邻域中所有第一角点的角点总数;
28、获取左侧邻域中每个第一角点与相邻的第一角点的距离值;
29、根据第一角点的角点总数和两个距离值计算第一距离变化程度值,其中,计算公式为:
30、;
31、其中,表示第个目标角点的第一距离变化程度值,表示第个目标角点在左侧邻域中第个第一角点与相邻的第一角点之间的距离;表示第个目标角点在左侧邻域中所有第一角点的角点总数,表示第个目标角点的左侧邻域中所有第一角点与相邻的第一角点之间的距离值的最大值,第个目标角点的左侧邻域中所有第一角点与相邻的第一角点之间的距离值的最小值。
32、作为优选,所述获取目标角点在左侧邻域中每个第一角点与相邻的第一角点之间的第一角度变化程度值的步骤,包括:
33、获取左侧邻域中所有第一角点的角点总数;
34、获取左侧邻域中每个第一角点与相邻的第一角点的斜率,并根据多个斜率计算第一角点与相邻的第一角点的斜率的平均值;
35、根据第一角点的角点总数和平均值计算第一角度变化程度值,其中,计算公式为:
36、 ;
37、其中,表示第个目标角点的第一角度变化程度值,表示第个角点在左侧邻域中第个角点与相邻的第一角点之间的斜率;表示第个目标角点在左侧邻域中第一角点与相邻的第一角点的斜率的平均值;表示第个角点的左侧邻域中所有第一角点的角点总数;表示绝对值函数。
38、作为优选,所述遍历所有路面图像,得到每张路面图像的子污迹区域的步骤之后,包括:
39、基于orb特征提取算法对所有路面图像进行对齐;
40、获取每张路面图像的子污迹区域在相邻路面图像中的预测区域;
41、对所有路面图像的子污迹区域进行膨胀处理和腐蚀处理,并基于连通域分析算法对子污迹区域和预测区域进行识别并合并,得到整体污迹区域。
42、作为优选,所述获取每张路面图像的子污迹区域在相邻路面图像中的预测区域的步骤,包括:
43、获取每张路面图像的采集时间,并根据采集时间获取每张路面图像与相邻路面图像的间隔时间;
44、获取车辆行驶速度,并根据车辆行驶速度和间隔时间计算采集每张路面图像至与相邻路面图像过程中的车辆行驶距离;
45、根据车辆行驶距离获取每张路面图像的子污迹区域在相邻路面图像中的预测区域。
46、作为优选,对所有路面图像的子污迹区域进行膨胀处理和腐蚀处理的步骤之前,还包括:
47、获取每张路面图像的子污迹区域的面积以及第一亮度均值;
48、获取每张路面图像中的路面正常区域,并获取路面正常区域的第二亮度均值;
49、根据子污迹区域的面积、第一亮度均值以及第二亮度均值计算每个子污迹区域的受损程度值,其中,计算公式为:
50、 ;
51、其中,表示子污迹区域的编号,表示第个子污迹区域的受损程度值;表示第个子污迹区域的面积;表示第个子污迹区域的第一亮度均值;表示正常路面区域的第二亮度均值;表示线性归一化函数,将数据值归一化至区间内;表示绝对值函数。
52、作为优选,得到整体污迹区域的步骤之后,包括:
53、获取每张路面图像中的阴影区域;
54、将整体污迹区域与阴影区域进行对比,得到每张路面图像的重叠部分;
55、去除重叠部分,得到每张路面图像的树荫区域。
56、作为优选,所述去除重叠部分,得到每张路面图像的树荫区域的步骤之后,包括:
57、对阴影区域进行划分,将阴影区域中被树荫区域遮挡住的子污迹区域作为遮挡区域,未被树荫区域遮挡住的子污迹区域作为未遮挡区域,除遮挡污迹区域、未遮挡污迹区域之外的阴影区域作为子树荫区域;
58、基于图像克隆技术将未遮挡污迹区域的像素复制至所述遮挡污迹区域;
59、获取路面正常区域的像素,并将路面正常区域的像素复制到所述子树荫区域,以对子树荫区域进行消除。
60、作为优选,所述根据完整路面污迹区域计算道路受损程度值,并根据道路受损程度值生成道路检测结果的步骤,包括:
61、获取每个子污迹区域所对应的受损程度值;
62、获取多个子污迹区域的总数,并根据受损程度值和总数计算完整路面污迹区域的道路受损程度值,其中,计算公式为:
63、;
64、其中,表示完整路面污迹区域的道路受损程度值;表示第个子污迹区域的受损程度值;表示子污迹区域的数量,表示子污迹区域的编号,表示第个子污迹区域在子污迹数量区间内时所有子污迹区域的受损程度值的最大值,表示第个子污迹区域在子污迹数量区间内时所有子污迹区域的受损程度值的最小值。
65、判断所述道路受损程度值是否大于或等于第二预设值;
66、若所述道路受损程度值大于或等于第二预设值,将与道路受损程度值对应的完整路面污迹区域的道路检测结果判定为造成影响;
67、若所述道路受损程度值小于第二预设值,将与道路受损程度值对应的完整路面污迹区域的道路检测结果判定为不造成影响。
68、本发明具有如下有益效果:
69、多功能道路检测车在道路上进行行驶时沿道路位置采集多张路面图像,再对路面图像进行图像处理,以获取每张路面图像中的子污迹区域,通过对多个子污迹区域所对应的路面图像进行拼接,能够得到整体污迹区域,由于整体污迹区域和位置在路面上是固定的,因此可将完整的污迹区域与每张路面图像中的阴影区域(污迹、树荫)进行对比,将污迹部分去除,则得到每张路面中树荫区域,这样能够达到自送识别出路面污迹和行道树荫的技术效果,再将树荫区域进行消除,对多个树荫区域进行消除的路面图像进行拼接,得到完整路面污迹区域,通过对完整路面污迹区域进行道路受损程度值的计算,能够通过道路受损程度值生成道路检测结果,由于避免了树荫区域对道路检测造成的不良影响,因此能够使得检测结果更加准确,提高了检测效率以及多功能道路检测车的实用性。
- 还没有人留言评论。精彩留言会获得点赞!