一种基于深度学习射频指纹的无人机身份识别方法
本发明属于信号识别和无人机身份识别领域,涉及一种无人机身份识别方法。
背景技术:
1、无人机识别相关的机器学习技术分为:基于射频信号的无人机身份识别系统、基于可见光的无人机识别系统、基于声纹的无人机识别系统、基于雷达的无人机探测系统、还有混合的无人机识别系统。例如中国专利申请号为2017105254440,公开了一种无人机身份识别方法及管理平台系统,其中所述方法包括:获取用于指示无人机身份的二维码信息;对所述二维码信息进行解密,得到无人机的身份识别码;对所述身份识别码进行解析,得到无人机的身份信息;将所述身份信息与备案库中预存的各无人机对应的身份信息进行匹配;若匹配成功,则确定所述无人机身份认证成功;若匹配失败,则确定所述无人机身份认证失败。存在的技术缺陷是:1.生成二维码用于指示无人机身份有着极大的冒名顶替风险,很容易将注册过的无人机身份二维码仿制印刷在未注册过的无人机表面;2.二维码的数字签名公证并不安全;3.二维码生成过程较为繁琐;4.不同无人机存在发送相同的认证过的二维码信息的风险;5.二维码信息可以直接通过复制图片的形式伪造;6.无线通信的内容固定,被攻击破解的风险较大。
2、其中的基于射频信号的检测方法的优点是它可以在白天或晚上以及任何天气条件下运行。因此,与其他现有技术相比,基于射频的监控技术在无人机通信系统中显示出更高的潜力。
3、基于射频指纹的无人机身份识别的难点在于环境电磁噪声会干扰检测系统。为了减轻电磁背景噪声对射频信号清晰度的影响,需要探索先进的信号处理方法以增强从射频信号中提取判别性特征的能力,例如压缩感知和自适应滤波;开发具有自适应学习功能的机器学习模型,能够持续改进和适应无人机信号变化、环境变化和新的无人机身份识别模型;探索边缘计算技术与基于射频指纹的无人机身份识别系统的集成,以实现更快的处理速度,从而在动态和资源受限的环境中实现实时决策;研究增强基于射频指纹的无人机检测、及身份识别系统抵御对抗性攻击的新方法,包括入侵检测机制和加密协议。
4、深度学习架构在许多应用中都达到了最先进的水平,例如语音识别、计算机视觉、视频分析、自然语言处理和异常检测。深度学习可以使用人眼完全无法察觉的范例来识别模式。其中包括人类感官系统无法检测到的传输,例如射频、光学和音频。深度学习方法可以分为以下四种类型:监督学习、半监督学习、无监督学习和强化学习。大多数基于深度学习的无人机检测技术都利用监督学习。无人机的身份识别常用的监督学习有cnn、rnn。其中,cnn通过局部卷积操作提取图像特征,适用于大多数视觉任务和时间序列模式识别任务,特别是在计算资源有限的情况下。vit是一种与cnn应用场景一致的深度学习架构,它通过自注意力机制捕捉全局信息,能够处理比cnn更复杂的视觉任务,特别是有大规模数据集上和计算资源充足的情况下。具体来说,1维vit将 transformer 架构应用于一维数据处理,能够捕捉全局依赖关系,适合时间序列分析、文本处理等任务,特别是当数据量大且需要建模复杂的依赖关系时。目前还没有用vit来做基于射频指纹的无人机身份识别。
技术实现思路
1、为了克服已有无人机身份识别方法的不足,本发明提供一种计算速度快、无人机身份识别准确度高、不泄露信息的基于深度学习射频指纹的无人机身份识别方法。
2、为实现上述技术目的,本发明采用了一种基于深度学习射频指纹的无人机身份识别方法,包括以下步骤:
3、步骤1、无人机开机运行,并发射射频信号;
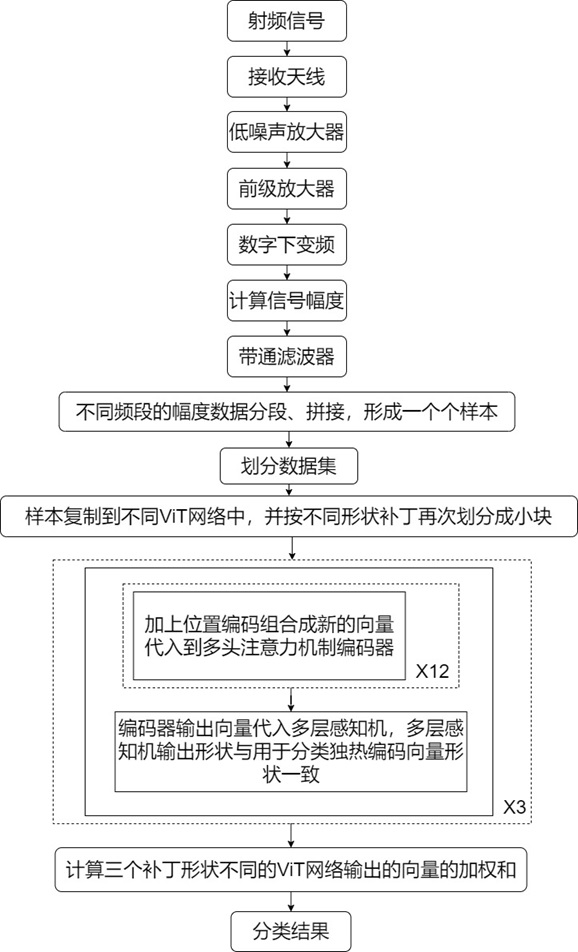
4、步骤2、天线接收空气中的射频信号,并将其传递给rf前端进行预处理,得到预处理后的射频信号;
5、步骤3、数字下变频处理,依次包括混频、低通滤波、抽取、生成iq信号;
6、步骤4、计算得到iq信号的幅度数据,幅度数据是接下来代入到网络进行训练或推理的原始数据;
7、步骤5、将幅度数据按设定固定长度划分,如果采集多个频段的射频信号,也就是同一时刻的射频信号有多个,则将多个一维幅度数据拼接在一起形成样本,即拼接后的幅度数据;
8、步骤6、按无人机的身份类别进行数据标注,标注采取独热编码,再按训练集测试集比例进行数据集的划分;
9、步骤7、样本代入到多尺度vit网络中,整个vit网络分为三个补丁形状不同的vit块和一个加权求和层;
10、将样本按64个为一个批次代入到其中一个vit块,首先通过卷积层提取划分为小块的特征,并将特征嵌入到高维空间,添加一个分类标记;添加位置编码,不改变维度;最终通过随机失活层(dropout)进行正则化;
11、然后进入到transformer编码器层,每个vit块中有12个相同的transformer编码器层,每一层包含自注意力机制和多层感知机mlp,并通过归一化层和残差连接提高训练效果;
12、将6个自注意力头的输出拼接在一起,与多头注意力层之前的归一化层的输入进行残差连接,通过随机深度层(stochasticdepth)保留残差;再通过归一化层和多层感知机,多层感知机的输出与在此之前的归一化层之前的输入进行残差连接,再经过一个全连接层,输出向量维度与无人机身份类别数一致;
13、将三个vit块的输出加权求和,输出向量即可推断无人机身份类别。
14、进一步,所述步骤2中,所述rf前端包括天线、低噪声放大器、带通滤波器和前级放大器,无线电信号经过天线采集后,依次通过低噪声放大器、带通滤波器和前级放大器进行信号处理;
15、低噪声放大器放大接收到微弱射频信号,同时尽量减少引入的噪声,提供足够的增益而不显著增加系统噪声,从而提高信号的信噪比(snr);
16、带通滤波器过滤掉不需要的频率成分,只允许特定频率范围的信号通过,减少来自其他频率源的干扰;
17、前级放大器进一步放大经过低噪声放大器和带通滤波器处理后的信号。
18、再进一步,所述步骤3中,混频是将预处理的射频信号与局部振荡器lo信号进行混频,以生成中频信号if;低通滤波移除混频后产生的高频分量,只保留目标频段的低频分量;抽取是降低信号的采样率以减少数据量,同时保留主要的信息内容;生成iq信号是指通过数字信号处理器dsp进行信号解调,分别提取信号的同相i和正交q分量。
19、所述步骤7中,自注意力机制有6个头学习不同特征,在每一个头中,已分块的序列使用三个不同的线性投影映射为查询q、键k 和值v 向量,公式为,
20、;
21、其中, w q , w k , w v为权重矩阵, x为分块嵌入后的矩阵;
22、通过点积计算查询q和键k之间的相似性,得到注意力得分矩阵,公式为,
23、;
24、其中, d k是投影维度, softmax将括号中的矩阵的每一行的数值转换为概率分布,使得每一行的数值和为1,softmax公式为,
25、;
26、其中,[ z 1 ,z 2 ,…,z n]为矩阵某一行的所有数值, z i表示某一行第i个数值,[ y 1 , y 2 ,…,y n]为softmax转化后的概率分布, y i表示第i个概率值;
27、将注意力得分矩阵与值向量 v相乘,得到每个位置的自注意力输出,公式为;
28、。
29、更进一步,所述步骤7中,在多尺度vit网络训练过程中,优化器为adam,损失函数为分类交叉熵损失,公式为,
30、;
31、其中, n是类别的数量, x i是该样本对应独热编码形式的标签中的代表不同无人机类别的分量,正确的类别位置下的分量 x i为1,其余位置 x i为0,是模型预测的概率分布,即通过 softmax 函数得到的每个类别的概率,log是对数函数,衡量指标是auc和分类准确度。
32、所述步骤7中,所述多层感知机的第一层输出维度为1024,第二层输出维度与输出矩阵的最后一维一致,激活函数类型为gelu,丢弃率为0。
33、本发明的基于深度学习射频指纹的无人机身份识别方法,是对某一段射频信号进行样本采集、数据处理、身份识别。本发明模型还可以学习区分没有无人机时的不断变化的环境中一直存在的射频信号,从而减少对无人机的误检。射频指纹是硬件工业生产时引入的随机瑕疵生成的无线电信号特征。通过深度学习模型进行无人机飞行时的射频指纹的特征提取,可以达到99%的无人机身份分类准确度。
34、本发明的有益效果主要表现在:1、相比已有的无线电通信识别无人机身份,射频指纹是物理层的特征,基于射频指纹识别无人机身份是没有身份泄露的风险;且由于产生射频指纹的硬件来源分析十分复杂;2、提出无人机身份识别方法并不涉及对信号 进行傅里叶变换处理,但可以做到相比包含傅里叶变换的其他机器学习方法更高的分类准确度。因此本案的方法极大地缩短了计算机处理时间,并明显减少计算机的内存消耗。整体架构基于vision transformer设计,是首个将vit应用到无人机射频信号分类。与已有的机器学习无人机身份识别技术相比,最终分类的准确度能大幅提高的原因在于基于vit的深度学习网络可以捕捉到不同区域的关联信息,而且本发明的多尺度vit网络,更是考虑了不同尺度下的信息并进行加权融合,使得网络在训练时能学习到更多的关键特征。
- 还没有人留言评论。精彩留言会获得点赞!