一种基于堆垛的分布式调度系统及其路径规划方法与流程
本发明涉及堆垛的,更具体地说,它涉及一种基于堆垛的分布式调度系统及其路径规划方法。
背景技术:
1、立式货仓的货物收货和出货是通过堆垛设备实现的,堆垛机是一种用于垂直堆放货物的自动化设备,其能够高效地搬运和堆放货物,以节省空间和提高物流效率。
2、堆垛机在运行过程中是根据控制机来输出执行指令,堆垛机接收到任务后,规划路径准备执行,堆垛机按照指定路径移动到目标货位,将货物提升至指定的高度,并精确地放置在预定的货位上,垛机完成操作后,仓库管理系统会实时更新库存信息,记录货物的存放位置、时间等信息,确保库存数据的准确性。在整个收货和出货过程中,系统会实时监控堆垛机的运行状态,确保操作的精确性和安全性。一旦出现故障或异常情况,系统会及时发出警报,并采取相应措施,而且为了安全堆垛机配备了防撞传感器和紧急停止装置,确保在运行过程中避免碰撞或其他危险情况。
3、但是,现有的路径规划无法实时适应动态变化的仓库环境,例如突然的订单变化或临时占用的通道,导致堆垛机可能走冤枉路,降低效率,为了解决该问题目前采用变轨的方式来调控,例如公告号cn 113501242 a公开的一种堆垛机多巷道作业的方法及系统,该技术通过获取堆垛机运行情况和任务坐标,并根据堆垛机运行情况创建设备 地图,根据任务坐标创建任务地图,基于所述设备地图、任务地图和任务策略调动堆垛机处理任务;当任务源位置、目标位置和堆垛机位置均在同一巷道时,调动本巷道内的堆垛机处理任务,否则调动堆垛机进行换轨,换轨完成后再处理任务。综合考虑优先级、距离、时间,算出任务权重值,权重值高的优先。
4、再例如公告号cn115344050a,公开的一种基于改进的聚类算法堆垛机路径规划方法,通过先将任务节点映射进时间域中,并提出一种时间距离尺度(length of time ,lt)指标,并依据lt使得聚类思想得以应用,后针对聚类结果可能存在分配冲突的问题,提出一种迭代消除策略,最终实现基于时间距离尺度的聚类思想的堆垛机路径规划。
5、上述两个现有技术前者通过换轨策略灵活应对环境变化,后者则通过时间域聚类优化路径选择。
6、虽然换轨策略能够灵活应对环境变化,但换轨操作本身增加了系统的复杂性。频繁的换轨可能导致系统调度变得复杂,尤其是在多台堆垛机同时作业的情况下,可能出现轨道争用、调度冲突等问题,从而降低整体效率。
7、虽然时间域聚类算法在静态环境中能够优化路径,但在面对实时动态变化(如突然的订单增加、通道临时封闭等)时,算法的响应速度和灵活性可能不足。尤其是在任务频繁变动的情况下,聚类算法的重计算可能导致系统的实时性下降。
8、综上,目前需要能够实时响应仓库环境变化的路径规划算法,减少由于订单变化或通道占用导致的路径规划失效。引入动态路径调整机制,使堆垛机能够快速适应环境变化,避免冤枉路,提高作业效率。开发分布式调度系统,使得多个堆垛机能够独立决策并协同工作,减少中央调度的负担,提高系统的灵活性和扩展性。
技术实现思路
1、针对现有技术存在的不足,本发明的目的在于提供一种高效地管理和协调多个堆垛机的任务执行,实现动态环境下的路径优化和任务分配,著提高仓储作业的整体效率和可靠性堆垛的分布式调度系统及其路径规划方法。
2、为实现上述目的,本发明提供了如下技术方案:
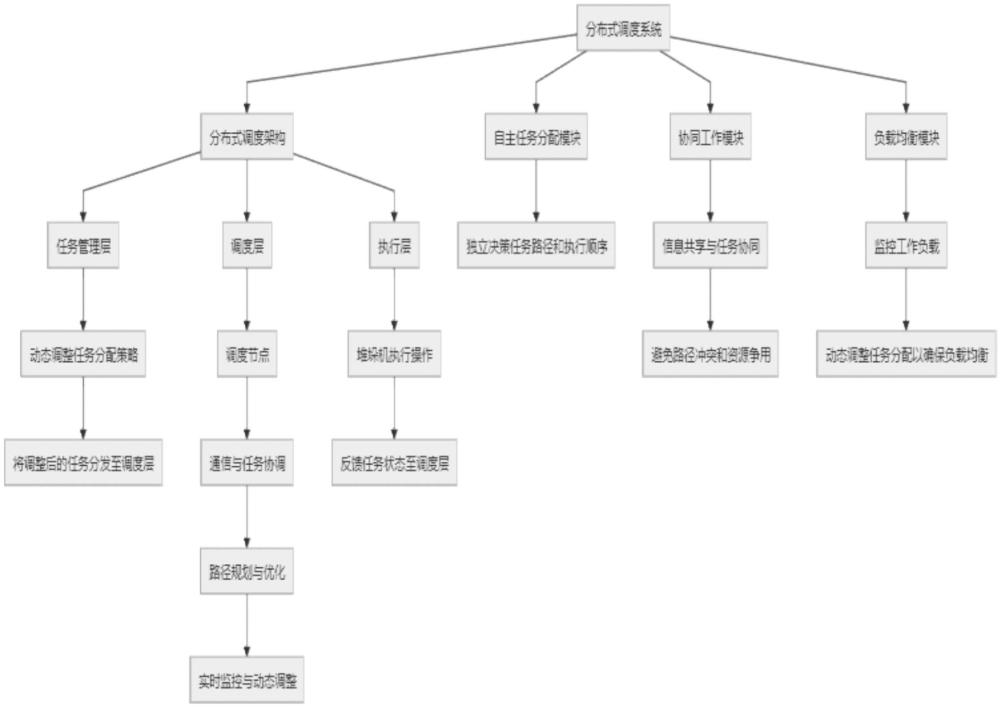
3、一种基于堆垛设备的分布式调度系统,包括以下模块:
4、分布式调度架构:包括任务管理层、调度层和执行层,
5、其中任务管理层能够根据实时订单数据和仓库环境,动态调整任务分配策略,并将调整后的任务分发至调度层;
6、调度层由若干个调度节点组成,各个调度节点通过实时通信协议和执行层的堆垛机进行通信,协调任务执行并优化路径规划,以避免路径冲突和资源争用,且能够实时监控堆垛机的状态和任务进度,并根据监控结果动态调整任务分配和路径规划;
7、执行层包括实际的堆垛机操作,堆垛机根据调度层的任务分配和路径规划指令执行物料搬运、堆垛和取货等操作,且在执行任务过程中能够实时反馈操作状态和任务进展至调度层,调度层根据反馈信息进行任务优化和调整;
8、自主任务分配模块:配置于每台堆垛机,用于根据任务的优先级、位置和当前状态,独立决策任务路径和执行顺序;
9、协同工作模块:采用实时通信协议,在堆垛机之间实现低延迟的信息共享和任务协同,避免路径冲突和资源争用;
10、负载均衡模块:实时监控各堆垛机的工作负载 ,动态调整任务分配,确保各堆垛机之间的负载均衡。
11、本发明进一步设置为:所述的自主任务分配模块包括任务路径规划和任务执行顺序管理,并通过协同工作模块实现多个堆垛机之间的任务协同和资源共享,确保全局任务执行的协调一致,
12、当自主任务分配模块在通信中断或协同工作模块不可用时,能够独立决策并继续执行当前任务,当通信恢复后,协同工作模块将重新同步任务状态并协调调整任务路径和执行顺序。
13、本发明进一步设置为:所述的协同工作模块根据路径冲突检测、优先级管理、资源锁定机制和动态任务再分配,确保多个堆垛机在同一任务空间内有效合作,避免路径冲突和资源争用。
14、本发明进一步设置为:所述的负载均衡模块包括冗余机制,当某台堆垛机发生故障时,备用堆垛机能够自动接管任务,确保系统的连续运行。
15、本发明进一步设置为:所述路径冲突检测包括:
16、当堆垛机在规划路径后,通过实时通信协议将路径信息共享给其他堆垛机,各堆垛机根据共享的路径信息进行路径预测,并自动调整路径或速度以避免冲突;
17、优先级管理包括:当多个堆垛机需要共享同一通道时,系统根据任务的紧急程度和堆垛机的位置,动态分配通行优先级,优先级较低的堆垛机自动调整路径或等待,确保关键任务的优先执行;
18、资源锁定机制包括:堆垛机在进入共享资源区域前,通过实时通信请求锁定该资源,其他堆垛机在收到锁定通知后,避免进入已锁定的资源区域,直至锁定解除;
19、所述的动态任务再分配包括:当某台堆垛机因任务变更或故障无法继续执行当前任务时,系统通过实时通信将该任务重新分配给其他堆垛机,重新分配的堆垛机在接收到新的任务后,立即调整路径并执行新任务,确保任务的及时完成。
20、一种基于堆垛的路径规划方法,包括以下步骤:
21、 s1、初始化算法相关参数与数据,包括堆垛机的运行状态、仓库环境数据、订单信息等,以建立路径规划的基础数据模型;
22、 s2、实时采集堆垛机的运行数据和仓库环境变化数据,并将这些数据传输至路径规划模块;
23、 s3、当检测到路径受阻或任务变化时,触发动态路径调整机制,采用增量式路径规划算法,仅对受影响的路径段进行重新规划;
24、 s4、结合机器学习算法,预测未来订单变化或通道占用情况,提前进行路径优化和任务分配;
25、 s5、输出优化后的路径规划结果,并实时更新堆垛机的执行指令。
26、本发明进一步设置为:所述的动态路径调整机制包括:
27、根据实时获取的环境数据,通过增量式a*算法快速计算新的最优路径;
28、在路径调整过程中,优先考虑任务的紧急程度、堆垛机的当前状态、以及路径的最小变化范围,以减少作业中断时间。
29、本发明进一步设置为:所述的预测模型采用深度学习,基于历史订单数据、仓库操作记录等进行训练,以提高未来订单波动和环境变化的预测精度。
30、本发明进一步设置为:所述堆垛机上具有gps定位系统、imu(惯性测量单元)、电量监控传感器,实时采集堆垛机的运行状态数据,并通过车载计算单元处理后传输至路径规划模块。
31、本发明进一步设置为:所采集到的数据通过实时通信协议传输至路径规划模块前要在本地进行初步处理,包括过滤噪声、数据融合和格式转换,其中部分数据会存储在数据库中,用于后续分析和机器学习算法的训练。
32、对比现有技术的不足,本发明的有益效果为:
33、配置于每台堆垛机的自主任务分配模块,能够根据任务优先级、堆垛机位置和当前状态,独立决策任务路径和执行顺序。这种独立性增强了系统的灵活性,使堆垛机能够快速响应任务变化,减少了对中央调度系统的依赖,并确保任务的高效完成。在路径受阻或任务变化时,增量式路径规划算法能够迅速调整路径,减少作业中断时间,确保任务在动态环境下的持续性和高效性。
34、结合机器学习算法,系统能够预测未来订单变化或通道占用情况,提前进行路径优化和任务分配。通过分析历史数据和实时环境变化,系统能够更精准地预测未来可能发生的情况,并提前进行调度优化,从而提高任务执行的准确性。
- 还没有人留言评论。精彩留言会获得点赞!