基于高光谱遥感和水质序列的高锰酸盐指数多点反演方法与流程
本发明属于水资源监测领域,具体涉及一种基于高光谱遥感和水质序列的高锰酸盐指数多点反演方法。
背景技术:
1、河流、湖泊等内陆水体对于维系生态平衡发挥着重要作用,但随着近年来社会经济的高速发展,水体的污染和破坏不断加重。因此,对流域内的重要点位进行精确、实时的有机物污染监测是生态治理和修复的长远之基。高锰酸盐指数(codmn)是指单位水体中还原性物质在规定条件下被氧化时消耗的氧化剂量,是反映流域内有机物污染的重要指标,对其进行监测具有相当重要的意义。
2、传统codmn的地面测定依赖于实验室采样测定或自动站测定,其存在人力物力财力消耗大且测定周期长的问题。随着遥感技术的不断发展,利用卫星影像进行水质反演逐渐成为主流,但codmn的遥感反演模型既难以捕捉codmn与光谱波段的相关性,同时又对于水质采样点密度要求较高,导致反演精度差的同时,模型的迁移性较弱。
3、除以上两种主流方式外,依靠水质时间序列进行预测的方法也在水质监测技术中逐步发展,其预测精度较高但应对环境突发变化的能力弱。
4、目前,现有的codmn遥感反演方法对于光谱相关性和水质采样点分布的要求较高,导致常规遥感反演模型难以适应采样点稀疏的场景。而单纯依靠水质时间序列进行codmn预测又难以捕捉水质的突发变化,无法进行实际运用。
技术实现思路
1、本发明提供一种基于高光谱遥感和水质序列的高锰酸盐指数多点反演方法,结合待反演点位的codmn水质数据和遥感光谱数据进行联合预测,降低采样点稀疏对精度的影响同时捕捉codmn的变化趋势,继而提高codmn的反演精度,所述高锰酸盐指数多点反演方法包括:
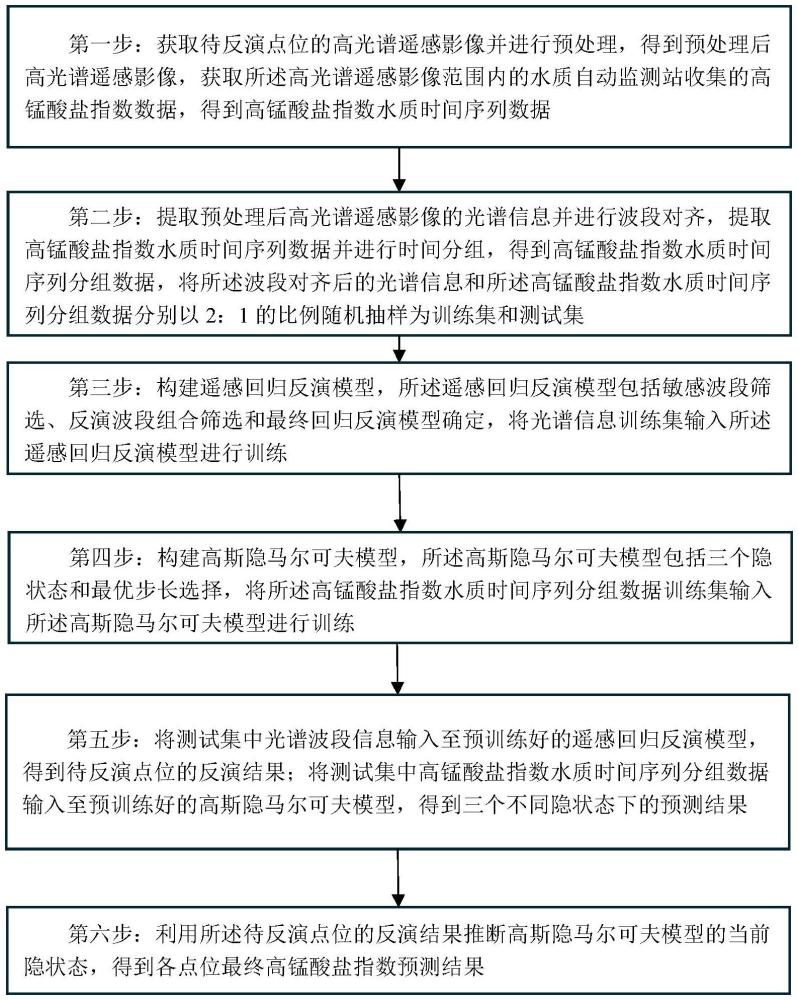
2、获取待反演点位的高光谱遥感影像并进行预处理,得到预处理后高光谱遥感影像,获取所述高光谱遥感影像范围内的水质自动监测站收集的高锰酸盐指数数据,得到高锰酸盐指数水质时间序列数据。
3、提取预处理后高光谱遥感影像的光谱信息并进行波段对齐,提取高锰酸盐指数水质时间序列数据并进行时间分组,得到高锰酸盐指数水质时间序列分组数据,将所述波段对齐后的光谱信息和所述高锰酸盐指数水质时间序列分组数据分别以2:1的比例随机抽样为训练集和测试集。
4、构建遥感回归反演模型,所述遥感回归反演模型包括敏感波段筛选、反演波段组合筛选和最终回归反演模型确定,使用光谱信息训练集对所述遥感回归反演模型进行训练。
5、构建高斯隐马尔可夫模型,所述高斯隐马尔可夫模型包括三个隐状态和最优步长选择,使用所述高锰酸盐指数水质时间序列分组数据训练集输入所述高斯隐马尔可夫模型进行训练。
6、将测试集中光谱信息输入至预训练好的遥感回归反演模型,得到待反演点位的反演结果;将测试集中高锰酸盐指数水质时间序列分组数据输入至预训练好的高斯隐马尔可夫模型,得到三个不同隐状态下的预测结果。
7、利用所述待反演点位的反演结果推断高斯隐马尔可夫模型的当前隐状态,得到各点位最终高锰酸盐指数预测结果,具体为:对所述最终回归反演模型进行精度验证得到误差均值作为阈值,使用高锰酸盐指数水质时间序列数据中的前日数据作为基准值;对高斯隐马尔可夫模型的预测结果进行从小到大的排序,得到第一个隐藏状态、二个隐藏状态、第三个隐藏状态;判断所述回归反演结果相较前日数据是否发生波动,如果未波动或上下波动范围未超过阈值,则选择第二个隐藏状态作为最终高锰酸盐指数预测结果;如果向下波动范围超过阈值,则选择第一个隐藏状态作为最终高锰酸盐指数预测结果;如果向上波动范围超过阈值,则选择第三个隐藏状态作为最终高锰酸盐指数预测结果。
8、进一步的,所述预处理为对所述高光谱遥感影像进行辐射定标、大气校正和正射校正,所述辐射定标的计算公式为:l=gain·dn+bias,其中,l为像元辐射亮度,单位为w/(cm2·μm·sr),dn为遥感影像像元亮度值,gain为辐射定标增益量,bias为辐射定标偏移量,单位均为w/(cm2·μm·sr);所述大气校正的计算公式为:其中,c为大气校正后的像元辐射亮度,ρ为像元反射率,ρe为像元周边区域的反射率均值,a、b由实际大气和几何条件计算得出,s为大气球面反照率,ca为大气程辐射。
9、进一步的,获取所述高光谱遥感影像范围内的水质自动监测站收集的高锰酸盐指数数据,具体为获取在所述高光谱遥感影像拍摄日期的前14日所收集的高锰酸盐指数数据,对所述高锰酸盐指数水质时间序列数据以n日为单位进行分组,得到高锰酸盐指数水质时间序列分组数据,其中7≤n≤14。
10、进一步的,所述波段对齐的处理方法为:对于不同高光谱卫星拍摄的高光谱遥感影像,选择其中一个高光谱卫星拍摄的影像作为基准影像,其余作为待配准影像;当待配准影像各波段与基准影像各波段的中心波段差值在规定范围内时,保留波段;当差值超过规定范围时,采取待配准影像的该波段与前波段或后波段的均值作为新的中心波段,使新的中心波段差值在规定范围内,采取前后波段辐射亮度值的均值作为新中心波段的辐射亮度值。
11、进一步的,所述遥感回归反演模型中的所述敏感波段筛选和反演波段组合筛选,采用皮尔逊相关系数法选择相关性最高的波段或波段组合作为由光谱信息到遥感回归反演自变量的计算公式,皮尔逊相关系数的公式为:其中,r为皮尔逊相关系数,xi为遥感回归反演自变量,yi为xi对应高光谱遥感影像拍摄当天的实测高锰酸盐指数水质数据,n为样本数量,为xi和yi的样本平均值,sx、sy为样本标准差;所述遥感回归反演模型中的最终回归反演模型,为线性回归模型、对数回归模型、多项式回归模型和乘幂回归模型建立完成后,采用r2进行精度验证,选择决定系数最高的回归反演模型,其中,其中,r2为决定系数,ssr为回归平方和,sst为总平方和,是与yi对应的反演水质。
12、进一步的,所述高斯隐马尔可夫模型包括:
13、构建用于描述水质隐藏状态的高斯隐马尔可夫模型,并对模型进行参数初始化,包括状态转移矩阵,初始概率矩阵,均值矩阵和协方差矩阵;
14、利用所述高锰酸盐指数水质时间序列分组数据,构建所述高斯隐马尔可夫观测序列;
15、将水质隐藏状态个数设置为3,利用baum-welch算法对所述高斯隐马尔可夫模型进行参数估计,得到训练后的状态转移矩阵,初始概率矩阵,均值矩阵和协方差矩阵;
16、通过状态转移矩阵和均值矩阵,计算下一阶段中各个状态期望观测值的加权平均值,作为所述隐藏状态的预测值。
17、优选的,使用测试样本对所述高锰酸盐遥感反演结果进行精度验证。
18、优选的,所述误差均值取自训练过程中所述最终回归反演模型的平均绝对误差,其公式为其中,mae为平均绝对误差,yi为实测高锰酸盐指数水质数据,是与yi对应的反演水质。
19、优选的,其特征是,所述高光谱遥感影像取自资源一号02d高光谱相机、资源一号02e高光谱相机和高分五号02星高光谱相机。
20、本发明提供的基于高光谱遥感和水质序列的高锰酸盐指数多点反演方法,结合高光谱遥感影像和实测水质时间序列数据,利用多维数据,降低采样点稀疏对精度的影响,同时抑制同谱异物现象干扰,提高了高锰酸盐指数多点位反演的精度。
- 还没有人留言评论。精彩留言会获得点赞!