针对夜间和隧道等低光照场景下的图像深度学习降噪方法与流程
本发明属于图像处理,具体涉及针对夜间和隧道等低光照场景下的图像深度学习降噪方法。
背景技术:
1、在现代图像处理领域,尤其是在夜间和隧道等低光照场景下,图像降噪和增强技术一直是研究的热点和难点。低光照条件下,由于光线不足,图像传感器接收到的光子数量较少,导致图像信噪比(snr)显著降低,从而产生大量的噪声。这些噪声不仅降低了图像的清晰度,还掩盖了重要的细节信息,影响了后续图像分析和处理的效果。因此,针对低光照场景的图像降噪和增强技术具有重要的研究价值和应用前景。
2、目前,已有多种技术和方法被提出用于解决低光照场景下的图像降噪问题。主要的方法包括但不限于以下几种:空间域降噪方法直接对图像像素进行处理,常见的方法包括均值滤波、中值滤波和自适应滤波等。均值滤波通过取邻域像素的平均值来平滑图像,从而减少噪声,但同时也会模糊图像细节。中值滤波通过取邻域像素的中值来替代中心像素值,能够有效去除椒盐噪声,但对高斯噪声的效果较差。自适应滤波则根据图像局部统计特性调整滤波参数,能够在一定程度上保留图像细节,但其效果依赖于参数的选择和局部统计特性的准确性。频域降噪方法通过对图像进行频域变换(如傅里叶变换、小波变换等),在频域内处理噪声。小波变换是一种常用的多尺度分析工具,通过将图像分解为不同尺度和频率成分,能够更精确地识别和去除噪声。小波阈值降噪方法是频域降噪的典型代表,通过设定适当的阈值,将高频部分的噪声去除,同时保留低频部分的图像细节。然而,如何选择合适的阈值和小波基函数仍然是一个挑战。基于统计模型的方法通过建立图像和噪声的统计模型来进行降噪处理。例如,高斯-马尔可夫随机场(gmrf)模型、贝叶斯估计等方法,通过对图像进行概率建模,利用最大后验估计(map)等技术来去除噪声。这类方法能够较好地保留图像细节,但计算复杂度较高,且对模型假设的依赖性较大。
技术实现思路
1、鉴于此,本发明的主要目的在于提供针对夜间和隧道等低光照场景下的图像深度学习降噪方法,本发明显著提高了低光照图像的降噪效果和细节保留能力,增强了方法的自适应性。
2、本发明采用的技术方案如下:
3、针对夜间和隧道等低光照场景下的图像深度学习降噪方法,所述方法包括:
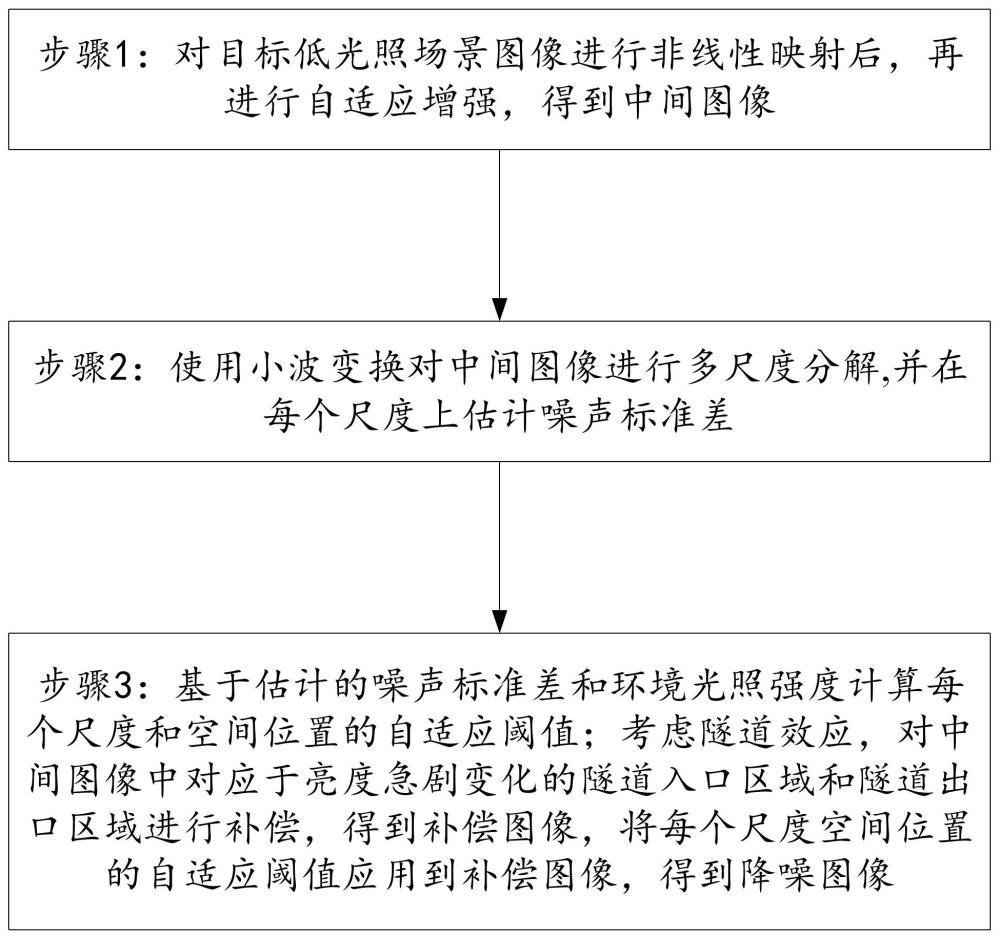
4、步骤1:对目标低光照场景图像进行非线性映射后,再进行自适应增强,得到中间图像;
5、步骤2:使用小波变换对中间图像进行多尺度分解,并在每个尺度上估计噪声标准差;
6、步骤3:基于估计的噪声标准差和环境光照强度计算每个尺度和空间位置的自适应阈值;考虑隧道效应,对中间图像中对应于亮度急剧变化的隧道入口区域和隧道出口区域进行补偿,得到补偿图像,将每个尺度空间位置的自适应阈值应用到补偿图像,得到降噪图像。
7、进一步的,所述低光照场景图像为在光照强度小于或等于100勒克斯下的环境中获取到的图像。
8、进一步的,通过如下公式,对目标低光照场景图像进行非线性映射,得到非线性映射图像:
9、;
10、其中,为目标低光照场景图像,值域为[0,1];为的全局平均亮度;为误差函数,具体形式如下:
11、;
12、其中,为误差函数的自变量;为积分变量。
13、进一步的,步骤1中,对非线性映射图像进行自适应增强,得到中间图像的公式如下:
14、;
15、其中,是的全局像素均值;是的全局像素标准差;为的全局平均亮度;和分别为的宽度和高度;和分别为像素的横坐标和纵坐标 ;为自适应参数,计算公式如下:
16、;
17、是伽马校正参数,计算公式如下:
18、。
19、进一步的,步骤2通使用小波变换对中间图像进行多尺度分解后,过如下公式,在每个尺度上估计噪声标准差:
20、;
21、其中,为第尺度下在光照水平下的噪声标准差;为第个尺度下的第个小波系数;为第个尺度下的小波系数的均值;为第个尺度下的小波系数的数量;为设定的调节参数;为中心尺度;为第个尺度下的小波系数的最大值。
22、进一步的,通过如下公式,为每个尺度和空间位置计算自适应阈值:
23、;
24、其中,为第尺度下,像素位置的自适应阈值;为参考光照强度,等于100勒克斯;像素位置,为横坐标,为纵坐标;中心像素位置,为中心像素位置的横坐标;为中心像素位置的纵坐标;,,和均为控制参数,其中,为取值范围为2到4的整数;的取值范围为0到1;的取值范围为0.1到0.3;;为求矩阵的行列式运算。
25、进一步的,步骤3中,考虑隧道效应,通过如下公式,对中间图像中对应于亮度急剧变化的隧道入口区域和隧道出口区域进行补偿,得到补偿图像:
26、;
27、其中,是预设的隧道效应补偿函数,使用如下公式计算得到:
28、;
29、其中,为补偿强度;为隧道入口中心坐标,为横坐标,为纵坐标;为隧道出口中心坐标,为横坐标,为纵坐标;为隧道入口区域大小参数,为设定值;为隧道出口区域大小参数,为设定值。
30、进一步的,补偿强度通过如下公式计算得到:
31、;
32、其中,为初始补偿强度,取值范围为0.4到0.6;为中间图像的最大亮度;为中间图像的最小亮度;为亮度尺度因子,取值范围为0.05到0.15;为中间图像的像素值的标准差;为中间图像的像素值的参考标准差,为设定值;为中间图像的熵;为熵调节系数,取值为1到3的整数;为参考标准熵,取值为6到10的整数;为当前中间图像的像素到最近隧道入口或出口的距离;为中间图像对角线长度的一半。
33、进一步的,步骤3中,通过如下公式,将自适应阈值应用于补偿图像,得到降噪图像:
34、;
35、其中,为补偿图像的像素位置集合;为补偿图像的尺度数。
36、采用以上技术方案,本发明产生了以下有益效果:本发明通过引入自适应阈值计算和多尺度降噪方法,显著提高了图像的降噪效果。在低光照场景下,噪声水平较高且复杂,通过自适应阈值计算方法,可以动态调整不同尺度和位置的阈值,从而更精确地抑制噪声。这种自适应性确保了在不同光照条件下,都能有效去除噪声,提高图像的清晰度和质量。在降噪过程中,细节保留是一个关键挑战。传统的降噪方法往往在去除噪声的同时也模糊了图像细节,导致图像质量下降。本发明通过多尺度分析和自适应阈值的引入,有效平衡了降噪和细节保留之间的矛盾。多尺度分析方法能够在不同分辨率下处理图像,使得高频细节得以保留,同时低频噪声被有效去除。通过自适应阈值的动态调整,确保了细节丰富区域的精细处理,使图像在降噪后依然保持高分辨率和细节清晰度。夜间和隧道等低光照场景下,光照条件复杂多变,传统的固定阈值方法难以适应这种变化。本发明通过综合考虑亮度对比度、噪声水平、图像熵和空间位置等因素,动态计算自适应阈值,使得降噪过程具有高度的自适应性。无论是光线极弱的夜间场景,还是光照急剧变化的隧道入口和出口,本发明的方法都能够自动调整参数,确保最佳的降噪效果和图像质量。
- 还没有人留言评论。精彩留言会获得点赞!