基于强化学习的机器人高精度运动控制算法的制作方法
本发明涉及运动控制算法,尤其涉及基于强化学习的机器人高精度运动控制算法。
背景技术:
1、近年来,机器人技术在多个领域得到了广泛应用,尤其在工业自动化、医疗服务和公共安全等方面。然而,在输电线路的维护和巡检中,由于环境复杂、线路长且存在高空作业的风险,传统的人工巡检方法存在着安全隐患和效率低下的问题。为了提高输电线路巡检的安全性和效率,防坠落轨道巡检机器人应运而生。这种机器人能够沿着输电线路轨道进行自主巡检,检测线路的状态和故障情况。
2、现有的防坠落轨道巡检机器人运动控制算法主要依赖于预设的轨迹规划和控制参数,当实际工作环境与预设轨迹不符时,机器人无法有效调整其运动轨迹,导致巡检精度下降,此外,当传感器发生故障或运动控制失效时,现有系统通常采用简单的容错措施,如数据冗余或错误补偿,无法从根本上解决问题,从而导致机器人难以在复杂和多变的环境中保持高精度的运动控制,影响巡检任务的可靠性和稳定性,因此需要设计一种基于强化学习的机器人高精度运动控制算法来解决上述问题。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述现有基于强化学习的机器人高精度运动控制算法存在的问题,提出了本发明。
3、因此,本发明目的是提供基于强化学习的机器人高精度运动控制算法,其适用于解决现有的运算控制方法中当实际工作环境与预设轨迹不符时,机器人无法有效调整其运动轨迹,导致巡检精度下降的问题。
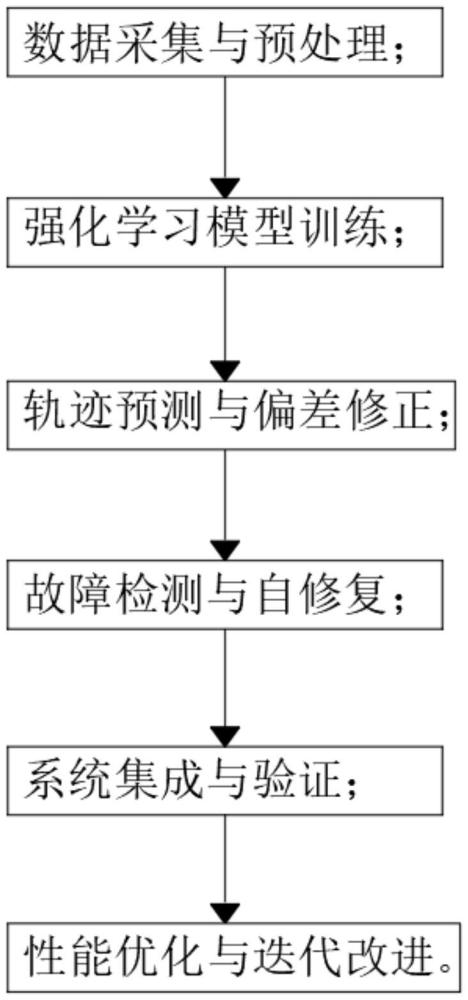
4、为解决上述技术问题,本发明提供如下技术方案:基于强化学习的机器人高精度运动控制算法,所述控制算法包括:
5、数据采集与预处理;
6、强化学习模型训练;
7、轨迹预测与偏差修正;
8、故障检测与自修复;
9、系统集成与验证;
10、性能优化与迭代改进。
11、作为本发明所述基于强化学习的机器人高精度运动控制算法的一种优选方案,其中:在轨迹预测与偏差修正中需要构建轨迹偏差预测公式预测未来多个时间步的轨迹偏差,并进行提前修正,所述轨迹偏差预测公式如下:
12、
13、其中,λ是衰减常数,用于调节动作对未来状态的影响,α和β是调整参数,用于调节正弦项的影响,st表示时间t的状态向量,at表示时刻t的动作向量,表示时刻t+k的预测状态向量;
14、公式输出的是未来k个时间步的预测状态,至于范围为所有可能得状态空间,若超出预期状态范围,表明需要修正轨迹。
15、作为本发明所述基于强化学习的机器人高精度运动控制算法的一种优选方案,其中:首先设计误差计算公式,所述误差计算公式如下:
16、et=st-sref,t
17、其中,et表示当前时刻t的误差向量,st表示当前时刻t的实际状态向量,表示机器人当前的状态,sref,t表示当前时刻t的参考状态向量,表示期望的状态。
18、作为本发明所述基于强化学习的机器人高精度运动控制算法的一种优选方案,其中:在误差计算公式输出结果中:
19、若|et|>emax表示误差超过预期范围,此时触发自修复控制流程;
20、若|et|≤emax表示误差在预期范围内,此时无需自修复,;
21、其中,emax表示允许的最大误差阈值。
22、作为本发明所述基于强化学习的机器人高精度运动控制算法的一种优选方案,其中:将误差计算公式的输出结果带入,根据误差计算公式构建误差衰减与调整公式,且误差衰减与调整公式如下:
23、
24、其中,eadj,t+k表示未来k个时间步调整后的误差向量,μ表示衰减常数,用于调节误差对未来状态的影响,决定误差随时间的衰减速度,γ表示正则化参数,用于避免误差项分母为零,同时平滑误差的影响,x为积分变量,表示时间的连续变化,et+k表示时刻t+j的误差向量,表示未来时间步的误差,m用于累计未来m个时间步的误差项。
25、作为本发明所述基于强化学习的机器人高精度运动控制算法的一种优选方案,其中:在误差衰减与调整公式的输出结果中:
26、若|eadj,t+k|>eadj,max,表示调整后的误差仍然超过允许范围,需要进一步调整控制策略;
27、若若|eadj,t+k|≤eadj,max,表示调整后的误差在预期范围,无需进一步调整控制策略;
28、其中,|eadj,t+k|代表调整后误差向量的模长,eadj,max表示调整后允许的最大误差阈值。
29、作为本发明所述基于强化学习的机器人高精度运动控制算法的一种优选方案,其中:将误差衰减与调整公式输出结果代入,根据误差衰减与调整公式和误差计算公式构建控制策略修正公式,且控制策略修正公式如下:
30、
31、其中,表示未来k个时间步的预测控制输入向量,ν表示衰减常数,用于调节调整后误差对控制输入的影响,决定控制输入随时间的衰减速度,θ表示调整参数,用于调节余弦项的影响,影响控制输入的计算,y表示积分变量,表示时间的连续变化,为未来k个时间步的预测状态向量,表示预测的机器人状态,ut+k为未来k个时间步的实际控制输入向量,表示实际应用的控制策略。
32、作为本发明所述基于强化学习的机器人高精度运动控制算法的一种优选方案,其中:预测控制输入向量表示未来时间步中所需要的控制策略;
33、若表示预测控制输入超过允许范围,需要进一步调整控制策略或修复方案;
34、若表示预测控制输入在允许范围内,无需调整控制策略或修复方案;
35、其中,表示预测控制输入向量的模长,umax表示允许的最大控制输入阈值。
36、作为本发明所述基于强化学习的机器人高精度运动控制算法的一种优选方案,其中:轨迹偏差预测公式的输出作为控制策略修正公式中的一部分输入,用于调整控制策略,控制策略修正公式生成的可以反过来影响轨迹偏差预测公式中的动作向量at+k,实现闭环控制。
37、作为本发明所述基于强化学习的机器人高精度运动控制算法的一种优选方案,其中:所述轨迹预测与偏差修正包括轨迹预测模块的设计和修正策略应用两个方面,所述故障检测与自修复包括故障检测模块的设计和自修复策略生成两个方面。
38、本发明的有益效果:通过强化学习的训练,机器人能够在面对不同的轨迹和环境变化时,提前预测并进行运动控制的优化,这种预见性使机器人能够更好地适应动态和复杂的工作环境,能够实时更新和调整运动控制策略,显著提高机器人对环境变化的响应速度;
39、在传感器故障或运动控制失效的情况下,机器人能够通过强化学习快速找到替代方案和修复策略,这种自修复能力不仅提高了机器人的可靠性,还减少了维护成本和停机时间,通过结合不同情况下的最佳修正策略,机器人能够在多种可能的故障模式下保持稳定运行,强化学习算法使机器人能够在多次训练和优化后,实现高精度的运动控制。
- 还没有人留言评论。精彩留言会获得点赞!