一种基于线结构光扫描的端圈粘贴点位规划方法
本发明属于计算机视觉领域,具体说是一种基于线结构光扫描的端圈粘贴点位规划方法。
背景技术:
1、随着我国科学技术的快速发展和工业自动化水平的不断提高,智能化、柔性化生产逐渐成为未来的趋势。机器视觉作为机器的“眼睛”,对提高系统鲁棒性和灵活性有着重要作用,因此得到了广泛的关注和应用。结构光作为一种高精度主动式的3d视觉,比传统2d视觉多了高度信息,可以应对更多的应用场景。在机器人搬运、涂胶、打磨等项目中,结构光得到了大量应用。
2、结构光测量方法是一种主动式光学测量技术,其基本原理是通过结构光投射器向被测物体表面投射可控制光点、光条或光面结构,并由图像传感器(例如摄像机)获得图像,然后通过系统几何关系,利用三角原理计算得到物体的三维坐标。根据结构光投射器向被测物体表面投射可控制的光点、光条或光面结构,结构光可分为点结构光、线结构光和面结构光。由于端圈粘贴规划应用中结构光设备的主要作用是测量和提取端圈内轮廓和外轮廓两个边界点,而点结构光测量方法需要逐点扫描端圈幅向进行测量,随着被测物体的增大,图像摄取和图像处理时间会急剧增加,难以实现实时测量;面结构光得到三维坐标点数据量很大,含有大量冗余数据,造成计算时间的浪费,因此,线结构光成为端圈测量应用中的首选。
3、但上述方法中,由于端圈加工精度低,端圈的半径、幅值相比于设计值均有所变化,且在转台上的摆放位置在一定范围内波动,一般的测量和规划方法的精度很难达到实际垫块粘贴的要求。
技术实现思路
1、为解决低加工精度端圈呈现不规则的近圆形轮廓,以及特定应用行业要求等间距规划粘贴点位的问题,本发明提供一种基于线结构光扫描的端圈粘贴点位规划方法,在等角度规划点位的基础上迭代优化,以实现高精度等间距的端圈点位规划。
2、本发明为实现上述目的所采用的技术方案是:一种基于线结构光扫描的端圈粘贴点位规划方法,包括以下步骤:
3、1)通过线结构光传感器扫描端圈轮廓数据;
4、2)对外轮廓数据使用ransac算法拟合端圈圆心,计算所有轮廓点相对于圆心的角度值;
5、3)在轮廓数据中定位端圈缺口的起始点和终止点;
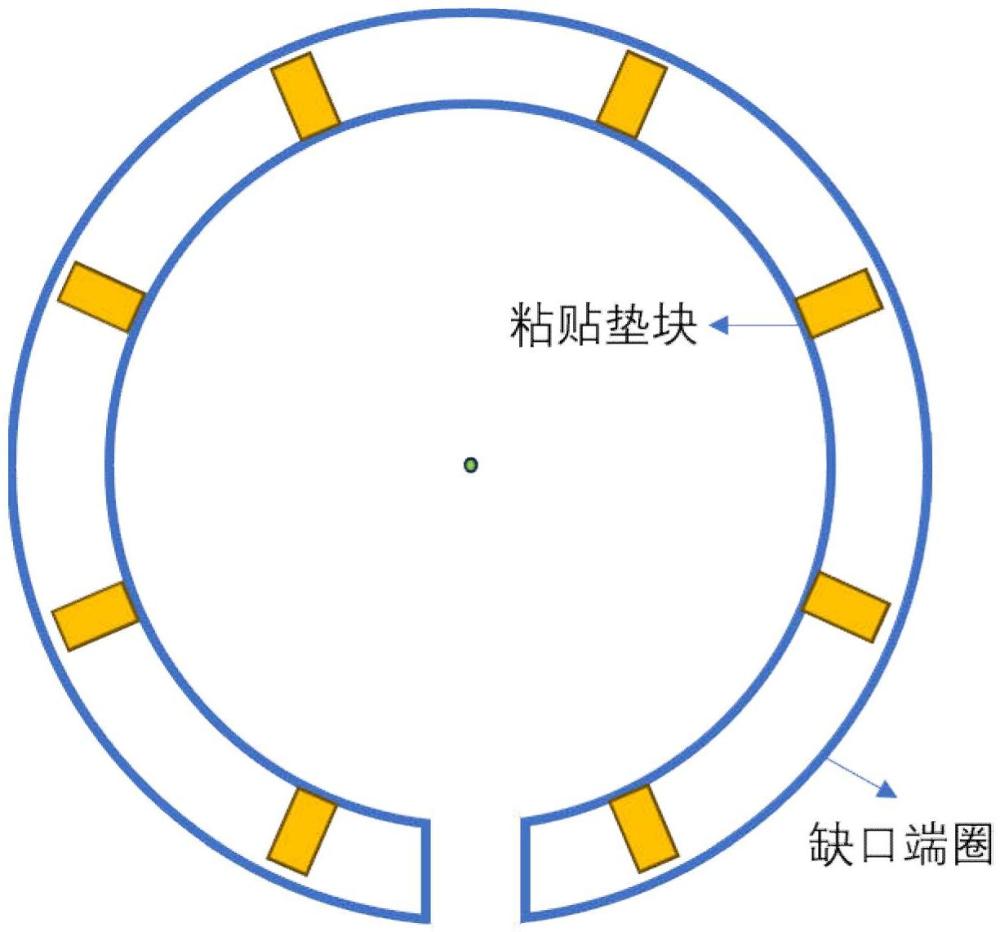
6、4)相对于缺口中线对称等角度规划垫块的粘贴点;
7、5)计算相邻粘贴点之间的弦长,在轮廓数据上迭代优化规划点位以保证点间距相等,完成端圈粘贴点位规划。
8、所述线结构光扫描端圈轮廓数据,具体为:
9、目标端圈放置于转台平面上旋转一周,线结构光传感器固定于转台上方完成对端圈轮廓的扫描,激光线照射于转台平面和端圈上表面,提取激光线在端圈上表面的左右端点,即为端圈内轮廓点和外轮廓点;转台旋转一周后,采集获得一组完整端圈的内轮廓数据indata和外轮廓数据outdata。
10、所述对外轮廓数据outdata使用ransac算法拟合端圈圆心,包括以下步骤:
11、2-1)从外轮廓数据outdata中随机选择三个点作为假设的内点子集s;
12、2-2)依据内点子集s估计圆参数,其中,圆参数,包括:圆心坐标po(xo,yo),半径r;
13、2-3)遍历外轮廓数据outdata中除内点子集s外的所有数据,如果数据点在给定误差e以内,则标记为内点,否则标记为外点;
14、2-4)所有内点组成一致集,如果一致集中点的个数满足给定阈值t,则用一致集中所有内点重新估计圆参数,然后结束算法;
15、2-5)如果一致集中内点个数少于阈值t,则重新选择新的子集s,并重复步骤2-1)~2-4);
16、2-6)经过k次迭代,选择一个内点数量最多的一致集,用一致集中所有内点重新估计圆参数,然后结束算法。
17、所述计算所有轮廓点相对于圆心的角度值,具体如下:
18、拟合端圈圆心坐标之后,计算所有内、外轮廓数据相对于圆心的角度,对任意轮廓点数据pi(xi,yi)计算对应角度值ai,即:
19、
20、其中,(xi,yi)为任意轮廓点数据,i为正整数,(xo,yo)为圆心坐标。
21、所述在轮廓数据中定位端圈缺口的起始点和终止点,具体为:
22、环状端圈上存在不同类型的缺口形式,包括:全缺口、内缺口、外缺口、无缺口;
23、从轮廓数据中定位缺口位置,求取缺口中心及起末点相对于圆心的角度amid、ae1、ae2;根据已知端圈缺口宽度的先验设计数值openwidth判断当前端圈有无缺口,即:
24、若openwidth为0,则当前端圈无缺口,amid、ae1、ae2设为0;若openwidth不为0,先从内轮廓数据中定位缺口位置,若找到缺口,则端圈为内缺口或全缺口形式;若内轮廓中未定位到缺口,则再从外轮廓数据中定位缺口位置,端圈为外缺口形式。
25、所述定位缺口位置,包括以下步骤:
26、3-1)半径滤波:遍历轮廓数据,对每一点数据pi到圆心po的距离ri进行判断,当ri与端圈半径的先验设计数值差异超过设定的阈值thdr时,将该点数据置为无效点nan;
27、3-2)种子点选取:再次遍历轮廓数据搜索缺口两端的起末种子点,假设数据点pi是起始种子点,若其为nan无效点则跳过,继续向下遍历pi;若其有效则以pi为起点向下依次遍历数据点pj,若pj无效则跳过点继续向下遍历pj,直至找到有效的pj;此时若pi与pj的距离dst大于0.9倍的openwidth,则认为找到缺口起末种子点,pi为起始种子点s1,pj为终止种子点s2;若dst小于0.9倍的openwidth,则跳过此pi,继续向下遍历pi;若遍历结束未找到起末种子点则结束算法;
28、3-3)缺口起点定位:以种子点s1向前遍历数据点p1i作为基点寻找缺口起点,若p1i为nan无效点则跳过,继续向下遍历p1i;若其有效则设定邻域累加器numneigh为0,以p1i为起点向前依次遍历数据点p1j作为邻域点,若p1j无效则跳过继续向前遍历p1j,若p1j有效则通过如下方法计算p1j和p1i的连线与po和p1i的连线的夹角angle;
29、
30、angle=cos-1(v1·v2)
31、其中,pni为基点,pnj为邻域点,angle为v1和v2的夹角;
32、若满足条件45<angle<135,则邻域累加器numneigh加1,继续向前遍历p1j,若不满足条件则跳过此p1i点,继续向前遍历p1i;当numneigh大于等于5时,认为找到缺口起点e1(xe1,ye1),结束此步骤;若遍历结束未找到缺口起点则结束算法;
33、3-4)缺口终点定位:以种子点s2向后遍历数据点p2i作为基点寻找缺口终点,若p2i为nan无效点则跳过,继续向下遍历p2i;若其有效则设定邻域累加器numneigh为0,以p2i为起点向前依次遍历数据点p2j作为邻域点,若p2j无效则跳过继续向前遍历p2j,若p2j有效则如上面的方法计算p2j和p2i的连线与po和p2i的连线的夹角angle;若满足条件45<angle<135,则邻域累加器numneigh加1,继续向前遍历p2j,若不满足条件则跳过此p2i点,继续向前遍历p2i;当numneigh大于等于5时,认为找到缺口终点e2(xe2,ye2),结束此步骤;若遍历结束未找到缺口终点则结束算法;
34、3-5)缺口中心点计算:通过缺口起点和终点坐标求平均值获得缺口的中心点坐标pmid(xmid,ymid);
35、3-6)角度计算:分别计算缺口中心及起末点相对于圆心的角度amid、ae1、ae2后结束。
36、所述在内轮廓数据上相对于缺口中线对称等角度规划垫块的粘贴点,包括以下步骤:
37、4-1)根据当前端圈粘贴等分数的先验设计数值n,则等间距划分时垫块之间的角度差异pstep,即:
38、pstep=360/n
39、4-2)以缺口中心角度为对称中心规划垫块的角度,第n块垫块中心相对于圆心的角度panglen,即:
40、panglen=amid+0.5*pstep+(n-1)*pstep(0<n≤n)
41、4-3)根据垫块宽度的先验设计数值为bwidth,端圈内径的先验设计数值为inr,则垫块宽度相对于圆心的角度范围bangle,即:
42、bangle=2*sin-1(0.5*bwidth/inr)
43、4-4)对每个垫块n来说,若满足判定条件,则说明其角度范围与缺口范围有重合,将该规划点位标为无效干涉点;
44、所述判定条件为:
45、ae1≤panglen-0.5*bangle≤ae2
46、ae1≤panglen+0.5*bangle≤ae2。
47、所述计算相邻粘贴点之间的弦长并在轮廓数据上迭代优化规划点位以保证点间距相等,包括以下步骤:
48、5-1)计算所有垫块规划中心点的坐标:
49、对第n个垫块,根据先前内轮廓数据中计算的每点角度值ai找到距离垫块中心点角度panglen最近的前后两个内轮廓数据点pf和pr,分别计算两点相对于圆心的距离rf和rr,垫块中心点相对于圆心距离rb为rf和rr的平均值,垫块中心点坐标p_bn(x_bn,y_bn)即根据相对圆心的角度和距离计算,如下:
50、x_bn=xo+rb*cos(panglei)
51、y_bn=yo+rb*sin(panglei)
52、5-2)计算每个垫块p_bn与下一垫块p_bn+1之间的中心点距离作为弦长chordn,若存在无效干涉点位,则不计算该点前后弦长,非干涉点时采用下式获取:
53、
54、5-3)求取所有弦长的平均值chordm;
55、5-4)以第n/2个规划点作为基准点,依次向后调整每一点弦长,直至调整完第n点,调整过程中跳过无效干涉点;对于第n个垫块规划点,若其与第n+1个垫块规划点的弦长小于chordm则以p_bn+1为起点,在内轮廓数据上依次向后遍历ptmp,直至p_bn与ptmp的距离大于chordm;若其与第n+1个垫块规划点的弦长大于等于chordm则以p_bn+1为起点,在内轮廓数据上依次向前遍历ptmp,直至p_bn与ptmp的距离小于等于chordm,此时记录ptmp为新的p_bn+1,并重新计算chordn和chordn+1,然后继续向后调整其余规划点;
56、5-5)以第n/2个规划点作为基准点,依次向前调整每一点弦长,直至调整完第1点,调整过程中跳过无效干涉点;对于第n个垫块规划点,若其与第n-1个垫块规划点的弦长小于chordm则以p_bn-1为起点,在内轮廓数据上依次向后遍历ptmp,直至p_bn与ptmp的距离大于chordm;若其与第n-1个垫块规划点的弦长大于等于chordm则以p_bn-1为起点,在内轮廓数据上依次向前遍历ptmp,直至p_bn与ptmp的距离小于等于chordm,此时记录ptmp为新的p_bn-1,并重新计算chordn和chordn-1,然后继续向前调整其余规划点;
57、5-6)若迭代次数等于k或所有弦长中最大值与最小值之差小于阈值t,则不再调整,继续步骤5-7);反之,则返回步骤5-3)继续迭代优化;
58、5-7)对每个调整后的垫块中心点坐标p_bn(x_bn,y_bn)计算对应角度panglen,若调整过的垫块角度范围与缺口范围有重合,将该规划点位标为无效干涉点,得到的全部点坐标p_bn及对应角度panglen即为端圈上等间距的粘贴规划点结果。
59、本发明具有以下有益效果及优点:
60、1.本发明采用线结构光传感器和pc机实现近圆形物体的测量与规划,具有设备简单、测量精度高的特点;
61、2.本发明可以实现近圆形物体的在线、自动、非接触测量;
62、3.本发明可以在近圆形物体轮廓上进行等间距的操作点位规划,规划精度高,更适合生产需要;
63、4.本发明对待测量物体的加工精度要求低,系统柔性好。
- 还没有人留言评论。精彩留言会获得点赞!