一种机器人位姿定位评估方法、装置、终端及存储介质与流程
本发明涉及机器人,尤其涉及的是一种机器人位姿定位评估方法、装置、终端及存储介质。
背景技术:
1、目前,传统的位姿测试方法往往依赖于单一传感器,如激光测距仪、视觉传感器或惯性测量单元(imu,inertial measurement unit)等,而且这些传感器各自存在显著的缺点,限制了位姿测量的准确性和可靠性。
2、例如,虽然激光测距仪具有高精度和长距离测量的能力,但其测量范围有限,且容易受到环境因素的影响,如光线、尘埃和障碍物等。此外,激光测距仪的成本较高,不适用于所有应用场景;又如,视觉传感器通过图像处理技术可以获取机器人的位姿信息,但是视觉传感器的精度由于会受到光线、阴影、遮挡和图像分辨率等因素的影响,导致在复杂或动态环境中,视觉传感器的性能可能会显著下降,进而使得位姿信息的准确性下降;再如,惯性测量单元通过测量加速度和角速度来推算机器人的位姿,但是imu数据存在测量偏差及噪声影响,并可能随时间发生积分漂移,导致定位和导航的不准确。
3、因此,现有技术存在缺陷,有待改进与发展。
技术实现思路
1、本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种机器人位姿定位评估方法、装置、终端及存储介质,旨在解决传统位姿测试方法中依赖单一传感器而限制位姿测量准确性和可靠性的问题。
2、本发明解决技术问题所采用的技术方案如下:
3、一种机器人位姿定位评估方法,其中,所述方法包括:
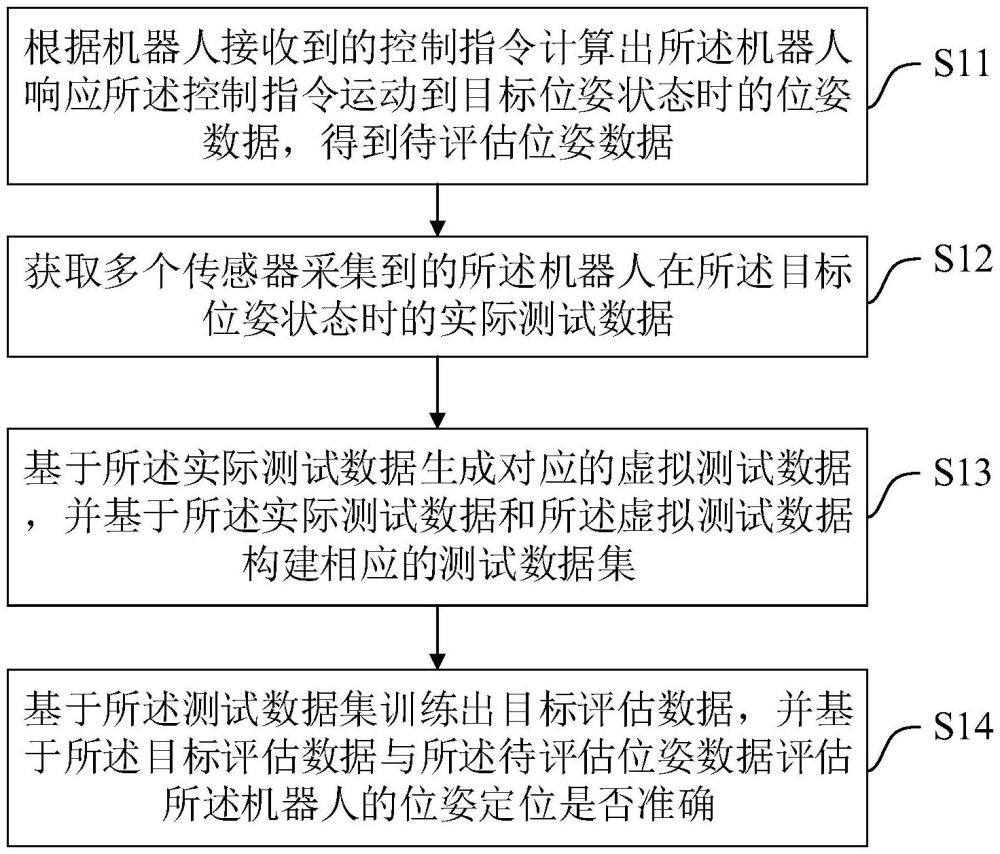
4、根据机器人接收到的控制指令计算出所述机器人响应所述控制指令运动到目标位姿状态时的位姿数据,得到待评估位姿数据;
5、获取多个传感器采集到的所述机器人在所述目标位姿状态时的实际测试数据;
6、基于所述实际测试数据生成对应的虚拟测试数据,并基于所述实际测试数据和所述虚拟测试数据构建相应的测试数据集;
7、基于所述测试数据集训练出目标评估数据,并基于所述目标评估数据与所述待评估位姿数据评估所述机器人的位姿定位是否准确。
8、在一种实现方式中,所述基于所述实际测试数据生成对应的虚拟测试数据,包括:
9、对所述实际测试数据进行趋势分析得到相应的趋势分析结果;
10、根据所述趋势分析结果生成相应的虚拟测试数据。
11、在一种实现方式中,所述基于所述实际测试数据和所述虚拟测试数据构建相应的测试数据集,包括:
12、按照预设数据比例选取所述实际测试数据和所述虚拟测试数据,以构建出相应的测试数据集。
13、在一种实现方式中,所述基于所述测试数据集训练出目标评估数据,包括:
14、为所述测试数据集中的测试数据分配相应的初始权重,并对所述测试数据集中的所述测试数据进行加权融合处理得到融合后评估数据;
15、计算所述融合后评估数据与所述实际测试数据之间的动态偏差,并判断所述动态偏差是否满足预设偏差条件;
16、在所述动态偏差未满足所述预设偏差条件时,则基于所述动态偏差调整所述初始权重得到调整后权重,并重新获取多个所述传感器采集到的所述机器人重新响应所述控制指令运动到所述目标位姿状态时的新的实际测试数据;
17、基于所述新的实际测试数据重新执行所述基于所述实际测试数据生成对应的虚拟测试数据,并基于所述实际测试数据和所述虚拟测试数据构建相应的测试数据集的步骤,得到新的测试数据集;
18、基于所述调整后权重和所述新的测试数据集重新执行对所述测试数据集中的所述测试数据进行加权融合处理得到融合后评估数据的步骤及其后续步骤,直至所述动态偏差满足所述预设偏差条件;
19、在所述动态偏差满足所述预设偏差条件时,则将所述融合后评估数据确定为目标评估数据。
20、在一种实现方式中,所述为所述测试数据集中的测试数据分配相应的初始权重之前,还包括:
21、对所述测试数据集中的测试数据执行预处理操作。
22、在一种实现方式中,所述基于所述目标评估数据与所述待评估位姿数据评估所述机器人的位姿定位是否准确,包括:
23、将所述目标评估数据与所述待评估位姿数据进行对比,以计算出所述目标评估数据与所述待评估位姿数据之间的位姿误差;
24、判断所述位姿误差是否满足预设误差范围得到相应的判断结果;
25、基于所述判断结果评估所述机器人的位姿定位是否准确。
26、在一种实现方式中,所述基于所述判断结果评估所述机器人的位姿定位是否准确,包括:
27、在所述判断结果表明所述位姿误差满足所述预设误差范围时,则判定所述机器人的位姿定位准确;
28、在所述判断结果表明所述位姿误差未满足所述预设误差范围时,则判定所述机器人的位姿定位不准确。
29、本发明还公开了一种机器人位姿定位评估装置,其中,所述装置包括:
30、位姿数据计算模块,用于根据机器人接收到的控制指令计算出所述机器人响应所述控制指令运动到目标位姿状态时的位姿数据,得到待评估位姿数据;
31、实测数据获取模块,用于获取多个传感器采集到的所述机器人在所述目标位姿状态时的实际测试数据;
32、虚拟数据生成模块,用于基于所述实际测试数据生成对应的虚拟测试数据;
33、数据集构建模块,用于基于所述实际测试数据和所述虚拟测试数据构建相应的测试数据集;
34、数据训练模块,用于基于所述测试数据集训练出目标评估数据;
35、位姿定位评估模块,用于基于所述目标评估数据与所述待评估位姿数据评估所述机器人的位姿定位是否准确。
36、本发明还公开了一种终端,其中,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的机器人位姿定位评估程序,所述机器人位姿定位评估程序被所述处理器执行时实现如上所述的机器人位姿定位评估方法的步骤。
37、本发明还公开了一种计算机可读存储介质,其中,所述计算机可读存储介质存储有计算机程序,所述计算机程序能够被执行以用于实现如上所述的机器人位姿定位评估方法的步骤。
38、本发明提供的一种机器人位姿定位评估方法、装置、终端及存储介质,所述机器人位姿定位评估方法包括:根据机器人接收到的控制指令计算出所述机器人响应所述控制指令运动到目标位姿状态时的位姿数据,得到待评估位姿数据;获取多个传感器采集到的所述机器人在所述目标位姿状态时的实际测试数据;基于所述实际测试数据生成对应的虚拟测试数据,并基于所述实际测试数据和所述虚拟测试数据构建相应的测试数据集;基于所述测试数据集训练出目标评估数据,并基于所述目标评估数据与所述待评估位姿数据评估所述机器人的位姿定位是否准确。由此可知,本发明根据控制指令计算出的机器人响应控制指令运动到目标位姿状态时的待评估位姿数据,并通过多个传感器采集机器人在目标位姿状态时的实际测试数据,然后基于实际测试数据生成虚拟测试数据,进而构建出包含实际测试数据和虚拟测试数据的测试数据集,并基于该测试数据集训练出目标评估数据,最后基于待评估位姿数据与目标评估数据评估机器人的位姿定位是否准确,也即本技术的技术方案通过实测数据与虚拟数据相结合的方式,融合多个传感器数据对机器人位姿定位进行评估,从而能够克服传统位姿测试方法中依赖单一传感器而限制位姿测量准确性和可靠性的问题。
- 还没有人留言评论。精彩留言会获得点赞!