一种基于ECoG信号的脑控目标控制方法和装置与流程
本技术涉及医疗技术辅助,具体涉及一种基于ecog信号的脑控目标控制方法和装置。
背景技术:
1、脑机接口技术是一种直连大脑与外部目标设备,使得通过大脑直接控制目标设备的技术。随着脑控技术的发展,已经实现了脑控句子拼写、控制机械臂、控制轮椅等多种应用。
2、目前已有技术中大多数基于脑电图(electroencephalogram,eeg)信号进行解码分析实现目标控制,基于脑皮层电图(electrocorticogram,ecog)信号的脑控技术研究相对较少。并且,现有技术中基于算法解码结果的脑控应用场景控制策略优化方法往往需要借助眨眼、面部肌电信号或雷达等附加信号进行综合决策与策略优化。这种方法虽然在一定程度上提高了脑控指令的执行精度,但增加了系统的复杂性,降低了用户体验。
3、因此,如何根据ecog信号实现脑控指令的精准执行是有待解决的技术问题。
技术实现思路
1、本技术提供一种基于ecog信号的脑控目标控制方法和装置,可以根据ecog信号实现脑控指令的精准执行,对脑控目标进行精准控制。
2、第一方面,本技术实施例提供基于ecog信号的脑控目标控制,所述基于ecog信号的脑控目标控制方法包括:
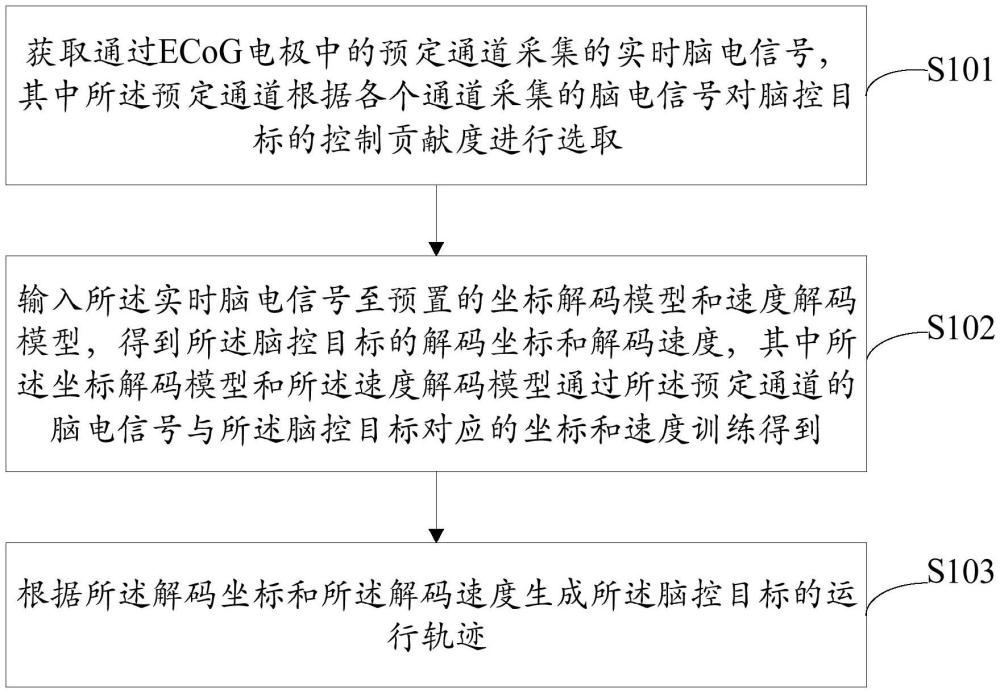
3、获取通过ecog电极中的预定通道采集的实时脑电信号,其中所述预定通道根据各个通道采集的脑电信号对脑控目标的控制贡献度进行选取;
4、输入所述实时脑电信号至预置的坐标解码模型和速度解码模型,得到所述脑控目标的解码坐标和解码速度,其中所述坐标解码模型和所述速度解码模型通过所述预定通道的脑电信号与所述脑控目标对应的坐标和速度训练得到;
5、根据所述解码坐标和所述解码速度生成所述脑控目标的运行轨迹。
6、结合第一方面,在一种实施方式中,在获取通过ecog电极中的预定通道采集的实时脑电信号之前,根据各个通道采集的脑电信号对脑控目标的控制贡献度选取所述预定通道,包括:
7、同步获取所述ecog电极中各个通道采集的脑电信号和所述脑控目标对应的真实坐标,并对获取的脑电信号进行降噪处理;
8、根据预设步长将各个通道采集的脑电信号裁剪为多个窗口片段,并根据各个窗口片段对应的真实坐标计算所述脑控目标对应的真实速度;
9、将各个窗口片段由时域信号转换为时频图,并对各个通道中的时频图进行划分,得到各个通道的第一训练集和第一测试集;
10、将各个通道的第一训练集中的时频图作为输入,将对应的每个方向的真实速度分别作为标签,对深度学习模型进行训练,分别得到各个通道每个方向的速度预测模型;
11、将各个通道的第一测试集中的时频图分别输入至每个方向的速度预测模型,得到对应每个方向的预测速度;
12、根据各个通道每个方向的预测速度和对应的每个方向的真实速度之间的第一相关系数,确定各个通道对所述脑控目标的控制贡献度系数;
13、确定控制贡献度系数最大的前q个通道为所述预定通道;
14、其中,所述每个方向包括坐标中的x方向和y方向,或者x方向、y方向和z方向。
15、在一种实施方式中,在输入所述实时脑电信号至预置的坐标解码模型和速度解码模型之前,训练所述坐标解码模型和所述速度解码模型包括:
16、将所述预定通道采集的脑电信号的窗口片段由时域信号转换为频域信号;
17、根据预设的采样频率和抽取频率对各个窗口片段进行频段分解,并计算每个频段的能量幅值平均值以进行窗口片段的特征提取,得到各个窗口片段的特征数据;
18、将各个窗口片段的特征数据作为输入,将对应的每个方向的真实坐标分别作为标签,分别对每个方向的多种坐标解码模型进行训练;
19、将各个窗口片段的特征数据作为输入,将对应的每个方向的真实速度分别作为标签,分别对每个方向的多种速度解码模型进行训练。
20、在一种实施方式中,在获取通过ecog电极中的预定通道采集的实时脑电信号之后,在输入所述实时脑电信号至预置的坐标解码模型和速度解码模型,得到所述脑控目标的解码坐标和解码速度之前,包括:
21、对所述实时脑电信号进行降噪处理;
22、按照所述预设步长将降噪后的实时脑电信号裁剪为实时窗口片段,将实时窗口片段由时域信号转换为频域信号,并对所述实时窗口片段进行特征提取,得到各个实时窗口片段的特征数据。
23、在一种实施方式中,输入所述实时脑电信号至预置的坐标解码模型和速度解码模型,得到所述脑控目标的解码坐标和解码速度,包括:
24、将连续u个实时窗口片段的特征数据输入至每个方向的多种坐标解码模型和每个方向的多种速度解码模型,得到连续u个实时窗口片段中各个实时窗口片段的每个方向的多个解码坐标和每个方向的多个解码速度;
25、根据各个实时窗口片段的每个方向的多个解码坐标进行优化计算,得到对应的每个方向的最终解码坐标;
26、根据各个实时窗口片段的每个方向的多个解码速度进行优化计算,得到对应的每个方向的最终解码速度。
27、在一种实施方式中,在得到所述脑控目标的解码坐标和解码速度之后,根据所述解码坐标和所述解码速度生成所述脑控目标的运行轨迹之前,还包括:
28、对u个实时窗口片段的最终解码坐标进行差分计算,得到u-1个反推速度;
29、分别计算x方向的最终解码速度与x方向的反推速度之间的第二相关系数,y方向的最终解码速度与y方向的反推速度之间的第三相关系数;
30、若所述第二相关系数大于等于所述第三相关系数与第一参考系数之和,且大于所述第一参考系数,则将每个方向的最终解码速度和反推速度的均值作为每个方向的修正速度,得到u-1个修正速度;
31、否则,将该每个方向的最终解码速度和反推速度中最小的作为每个方向的修正速度,得到u-1个修正速度。
32、在一种实施方式中,在得到所述脑控目标的解码坐标和解码速度之后,根据所述解码坐标和所述解码速度生成所述脑控目标的运行轨迹之前,还包括:
33、对u-1个修正速度进行逆向差分计算,得到对应的u个反推坐标;
34、分别计算x方向的最终解码坐标与x方向的反推坐标之间的第四相关系数,y方向的最终解码坐标与y方向的反推坐标之间的第五相关系数;
35、若所述第四相关系数大于等于所述第五相关系数与第二参考系数之和,且大于所述第二参考系数,则将每个方向的最终解码坐标和反推坐标的均值作为每个方向的修正坐标,以得到u个修正坐标;
36、否则,将该实时窗口片段每个方向的最终解码坐标和反推坐标中最小的作为每个方向的修正坐标,以得到各个实时窗口片段的修正坐标,以得到u个修正坐标。
37、在一种实施方式中,在确定各个实时窗口片段每个方向的修正坐标和修正速度之后,还包括:
38、基于三西格玛原则剔除预设的各个平滑步长中每个方向的异常修正坐标;
39、基于三西格玛原则剔除所述各个平滑步长中每个方向的异常修正速度;
40、其中,所述平滑步长大于2*u个实时窗口片段。
41、在一种实施方式中,根据所述解码坐标和所述解码速度生成所述脑控目标的运行轨迹,包括:
42、对剔除异常值后的修正坐标进行拟合得到所述脑控目标的运动意图曲线;
43、计算所述运动意图曲线中各个修正坐标的切线斜率,并确定各个修正坐标的切线斜率和修正坐标对应的修正速度方向之间的夹角;
44、若所述夹角小于等于预设的夹角阈值,则将该夹角对应的第一目标修正坐标和与所述第一目标修正距离k个修正坐标的第二目标修正坐标之间所有目标修正坐标的平均值作为决策坐标,将所有目标修正坐标对应的修正速度的平均值作为决策速度;
45、若所述夹角大于所述夹角阈值,则将该夹角对应的第三目标修正坐标和与所述第三目标修正距离k个修正坐标的第四目标修正坐标进行连接,形成目标直线,并计算所述第三目标修正坐标与所述第四目标修正坐之间各个目标修正坐标与所述目标直线的距离,将距离最大的目标修正坐标作为中心坐标,将中心坐标前后的t个目标修正坐标作为决策坐标,将决策坐标对应的修正速度作为决策速度;
46、连接所述决策坐标生成与当前间隔k个坐标后所述脑控目标的运行轨迹;
47、确定所述运行轨迹中各个决策坐标的曲率半径,当所述曲率半径小于等于预设半径阈值时,将对应的决策速度方向纠正为指向对应决策坐标的曲率圆心。
48、第二方面,本技术实施例提供了一种基于ecog信号的脑控目标控制装置,所述基于ecog信号的脑控目标控制装置包括:
49、获取模块,其用于获取通过ecog电极中的预定通道采集的实时脑电信号,其中所述预定通道根据各个通道采集的脑电信号对脑控目标的控制贡献度进行选取;
50、解码模块,其用于输入所述实时脑电信号至预置的坐标解码模型和速度解码模型,得到所述脑控目标的解码坐标和解码速度,其中所述坐标解码模型和所述速度解码模型通过所述预定通道的脑电信号与所述脑控目标对应的坐标和速度训练得到;
51、生成模块,其用于根据所述解码坐标和所述解码速度生成所述脑控目标的运行轨迹。
52、本技术实施例提供的一种基于ecog信号的脑控目标控制方法和装置,通过获取通过ecog电极中的预定通道采集的实时脑电信号,其中所述预定通道根据各个通道采集的脑电信号对脑控目标的控制贡献度进行选取;输入所述实时脑电信号至预置的坐标解码模型和速度解码模型,得到所述脑控目标的解码坐标和解码速度,其中所述坐标解码模型和所述速度解码模型通过所述预定通道的脑电信号与所述脑控目标对应的坐标和速度训练得到;根据所述解码坐标和所述解码速度生成所述脑控目标的运行轨迹,实现了根据ecog信号完成对脑控目标的控制策略优化,保证了脑控指令的精准执行。
- 还没有人留言评论。精彩留言会获得点赞!