基于AI识别的隧道施工工序管理方法、装置及系统与流程
本技术涉及人工智能,具体而言,涉及一种基于ai识别的隧道施工工序管理方法。
背景技术:
1、在隧道施工场景中,对施工安全要求较高,并且存在施工空间小的问题。因此,为了保证施工安全,提高施工效率,需要较为精准地及时了解当前施工工序或施工进度。现有依靠人工记录人工上报施工工序或施工进度的方式,存在容易误报错报,或者信息更新上报不及时的问题。
技术实现思路
1、为了克服现有技术中的上述不足,本技术的目的在于提供一种基于ai识别的隧道施工工序管理方法,所述方法包括:
2、通过图像采集设备获取施工人员的人脸图像;
3、将所述人脸图像输入人员识别模型进行处理,获得所述人员识别模型输出的人员识别结果;
4、根据所述人员识别结果及预设的人员和工序对应关系,确定第一工序识别结果;
5、通过射频识别设备获取进入隧道的施工载具的身份信息;
6、根据所述施工载具的身份信息及预设的载具和工序对应关系,确定第二工序识别结果;
7、根据所述第一工序识别结果、所述第一工序识别结果对应的第一权重、所述第二工序识别结果及所述第二工序识别结果对应的第二权重,确定施工工序阶段。
8、在一些可能的实现方式中,所述方法还包括:
9、根据所述施工工序阶段确定对应的施工状态识别模型;
10、获取所述隧道内目标位置的隧道施工监控图像,并将所述隧道施工监控图像输入所述施工状态识别模型;
11、通过所述施工状态识别模型的人员动作特征提取单元对所述隧道施工监控图像进行处理,获得人员动作特征向量;
12、通过所述施工状态识别模型的载具状态特征提取单元对所述隧道施工监控图像进行处理,获得载具状态特征向量;
13、通过所述施工状态识别模型的人员载具位置特征提取单元对所述隧道施工监控图像进行处理,获得人员载具位置特征向量;
14、对所述人员动作特征向量、所述载具状态特征向量及所述人员载具位置特征向量进行特征融合,获得融合特征向量;
15、将所述融合特征向量输入所述施工状态识别模型的分类处理单元,获得所述分类处理单元输出的所述目标位置的施工状态识别结果。
16、在一些可能的实现方式中,所述通过所述施工状态识别模型的人员载具位置特征提取单元对所述隧道施工监控图像进行处理,获得人员载具位置特征向量的步骤,包括:
17、通过所述人员载具位置特征提取单元的第一子模块对所述隧道施工监控图像进行处理,获取所述施工载具的至少一个人员操作区域的第一位置数据;所述人员操作区域包括驾驶区域、升降台区域及控制台区域中的至少一种;所述第一位置数据包括载具类型数据项及分别与多个人员操作区域对应的位置数据项,所述载具类型数据项用于指示所述施工载具的类型,每个所述位置数据项用于指示一个所述人员操作区域在图像中的位置信息;
18、通过所述人员载具位置特征提取单元的第二子模块对所述隧道施工监控图像进行处理,获取所述施工人员的第二位置数据;
19、将所述第一位置数据和所述第二位置数据拼接为所述人员载具位置特征向量。
20、在一些可能的实现方式中,所述方法还包括:
21、将所述载具状态特征向量及所述人员载具位置特征向量输入预先训练的施工风险预测模块,获得所述施工风险预测模块输出的施工风险检测结果。
22、在一些可能的实现方式中,所述方法还包括:
23、根据所述目标位置的所述隧道施工监控图像确定施工载具的移动方向;
24、根据所述目标位置的所述施工状态识别结果及所述施工载具的移动方向控制所述隧道内的通行交通指示灯。
25、在一些可能的实现方式中,所述方法还包括:
26、根据多个时间点对应的所述施工状态识别结果,确定对应的施工进度预测结果;
27、根据所述施工进度预测结果调整待进入所述隧道的施工载具的进入次序序列。
28、在一些可能的实现方式中,所述方法还包括:
29、获取第一训练样本,所述第一训练样本包括训练图像及第一标签,所述第一标签包括所述训练图像中施工人员的位置框信息及人体关键点信息;
30、通过所述第一训练样本对所述人员动作特征提取单元进行训练;
31、获取第二训练样本,所述第二训练样本包括样本图像及第二标签,所述第二标签包括在所述样本图像中的施工载具的类型及设备关键点信息;
32、通过所述第二训练样本对所述载具状态特征提取单元进行训练;
33、获取第三训练样本,所述第三训练样本包括样本图像及第三标签,所述第三标签包括所述样本图像中标注出的施工人员的位置、施工载具位置及施工载具的人员操作区域;
34、通过所述第三训练样本对所述人员载具位置特征提取单元进行训练。
35、在一些可能的实现方式中,所述根据所述第一工序识别结果、所述第一工序识别结果对应的第一权重、所述第二工序识别结果及所述第二工序识别结果对应的第二权重,确定施工工序阶段的步骤,包括:
36、通过以下公式计算第个预设施工工序对应的融合识别执行度:
37、
38、其中,为所述第一工序识别结果中,第个预设施工工序对应的第一识别置信度;为第一工序识别结果在第个预设施工工序对应的第一权重;为所述第二工序识别结果中,第个预设施工工序对应的第二识别置信度;为第二工序识别结果在第个预设施工工序对应的第二权重;
39、将融合识别执行度最高的预设施工工序确定为当前的施工工序阶段。
40、本技术的另一目的在于提供一种基于ai识别的隧道施工工序管理装置,所述装置包括:
41、图像采集模块,用于通过图像采集设备获取施工人员的人脸图像;
42、第一识别模块,用于将所述人脸图像输入人员识别模型进行处理,获得所述人员识别模型输出的人员识别结果;
43、第二识别模块,用于根据所述人员识别结果及预设的人员和工序对应关系,确定第一工序识别结果;
44、射频采集模块,用于通过射频识别设备获取进入隧道的施工载具的身份信息;
45、第三识别模块,用于根据所述施工载具的身份信息及预设的载具和工序对应关系,确定第二工序识别结果;
46、工序判断模块,用于根据所述第一工序识别结果、所述第一工序识别结果对应的第一权重、所述第二工序识别结果及所述第二工序识别结果对应的第二权重,确定施工工序阶段。
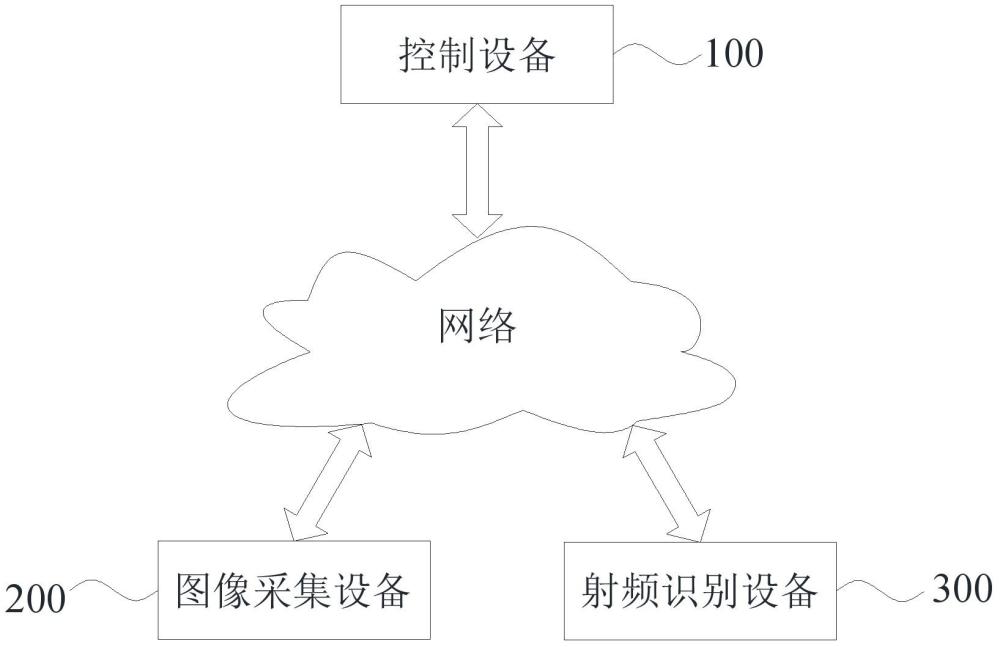
47、本技术的另一目的在于提供一种基于ai识别的隧道施工工序管理系统,所述系统包括图像采集设备、射频识别设备及控制设备;
48、所述图像采集设备用于获取施工人员的人脸图像;
49、所述射频识别设备用于获取进入隧道的施工载具的身份信息;
50、所述控制设备用于将所述人脸图像输入人员识别模型进行处理,获得所述人员识别模型输出的人员识别结果;根据所述人员识别结果及预设的人员和工序对应关系,确定第一工序识别结果;根据所述施工载具的身份信息及预设的载具和工序对应关系,确定第二工序识别结果;根据所述第一工序识别结果、所述第一工序识别结果对应的第一权重、所述第二工序识别结果及所述第二工序识别结果对应的第二权重,确定施工工序阶段。
51、相对于现有技术而言,本技术具有以下有益效果:
52、本技术提供的基于ai识别的隧道施工工序管理方法、装置及系统,通过图像采集设备采集施工人员的人脸图像获得人员识别结果,并根据预设的人员和工序对应关系确定第一工序识别结果,同时通过射频识别设备确定施工载具的身份信息,并根据预设的载具和工序对应关系确定第二工序识别结果,再根据所述第一工序识别结果、所述第一工序识别结果对应的第一权重、所述第二工序识别结果及所述第二工序识别结果对应的第二权重,确定所述目标位置的施工工序阶段。如此,可以更加准确地确定隧道的施工工序阶段,为后续施工进度管控和施工安全管控提供准确的数据支撑。
- 还没有人留言评论。精彩留言会获得点赞!