一种L4级别自动驾驶车辆的数据处理方法、系统及介质与流程
本发明涉及自动驾驶,尤其是涉及一种l4级别自动驾驶车辆的数据处理方法、系统及介质。
背景技术:
1、随着科技的不断发展,自动驾驶技术也在不断地发展,越来越成为人们关注的话题和研究的方向。
2、现有技术中,中国专利(申请号:202210862664.3,公开号:cn115098554a)公开了车辆自动驾驶数据处理方法、装置、电子设备和存储介质,接收云端发送的至少一个待处理任务;根据待处理任务,采集车辆的指定数据;根据与待处理任务对应的预设筛选规则对指定数据进行筛选,得到筛选后的数据;将筛选后的数据上传至云端,以使用户基于终端设备从云端下载待处理任务对应的数据并进行处理。该方案中,车辆与平台之间的连接是基于测试道路中的局域网来完成的,对于不具有局域网的地区则无法实时上传数据到云端,且局域网的建设成本较大;同时该技术采集的是l3级别的自动驾驶数据,未涉及更高级别的l4级别自动驾驶数据处理与仿真。
3、现有技术中,中国专利(申请号:202311802565.7,公开号:cn117950334a)公开了自动驾驶车辆的仿真数据处理方法、装置、存储介质及车辆,该方法包括:响应于接收到对自动驾驶车辆的仿真操作,获取自动驾驶车辆的仿真数据,其中,仿真数据用于表示对自动驾驶车辆进行事故仿真生成的数据;基于仿真数据确定自动驾驶车辆的报警数据和车辆速度集合,其中,报警数据用于表示自动驾驶车辆在事故仿真过程中的报警状态,车辆速度集合包含自动驾驶车辆在不同行驶时间点的车辆速度;根据报警数据和车辆速度集合确定开始截取时间点和结束截取时间点;基于开始截取时间点和结束截取时间点对仿真数据进行截取,得到目标仿真数据。该方案中未全量获取仿真数据,而是部分截取的,也不支持手动获取仿真数据,对于问题的追踪有所限制,同时对于仿真数据的分析处理未形成数据集合批量处理,效率方面还存在限制。
技术实现思路
1、鉴于以上现有技术的不足,本发明提供了一种l4级别自动驾驶车辆的数据处理方法、系统及介质,不仅能够对车辆的数据进行精确的处理,而且自动驾驶车辆与平台的通信以及数据包的云端上传不需要依赖于专网实现,通过公网便可实现功能,可以缩减项目建设成本。
2、为了实现上述目的及其他相关目的,本发明提供的技术方案如下:一种l4级别自动驾驶车辆的数据处理方法,所述方法包括:
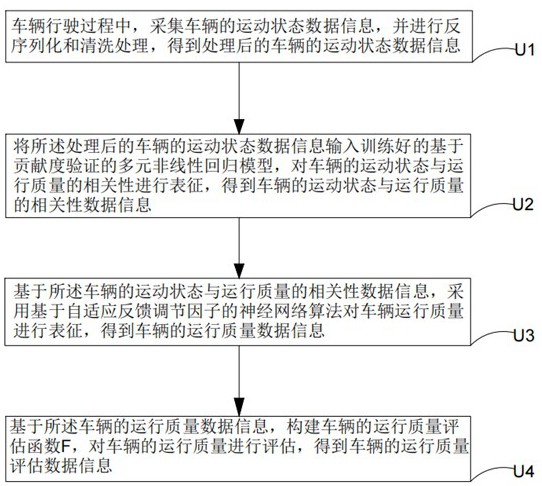
3、u1.车辆行驶过程中,采集车辆的运动状态数据信息,并进行反序列化和清洗处理,得到处理后的车辆的运动状态数据信息;
4、u2.将所述处理后的车辆的运动状态数据信息输入训练好的基于贡献度验证的多元非线性回归模型,对车辆的运动状态与运行质量的相关性进行表征,得到车辆的运动状态与运行质量的相关性数据信息;
5、u3.基于所述车辆的运动状态与运行质量的相关性数据信息,采用基于自适应反馈调节因子的神经网络算法对车辆运行质量进行表征,得到车辆的运行质量数据信息;
6、u4.基于所述车辆的运行质量数据信息,构建车辆的运行质量评估函数f,对车辆的运行质量进行评估,得到车辆的运行质量评估数据信息。
7、进一步的,所述方法还包括:
8、u5.基于所述车辆的运行质量评估数据信息,设置预设阈值,若车辆的运行质量评估数据小于预设阈值则车辆的运行质量不满足要求,需对车辆的运行状态进行调整,若车辆的运行质量评估数据大于预设阈值则车辆的运行质量满足要求,正常行驶。
9、进一步的,在步骤u2中,所述训练好的基于贡献度验证的多元非线性回归模型包括:
10、u21.基于所述处理后的车辆的运动状态数据信息,构建车辆的运动状态数据集,并建立车辆运动状态数据集的贡献度函数qi,
11、
12、其中,xi为处理后的第i时刻的车辆的运动状态数据信息,xj为处理后的第j时刻的车辆的运动状态数据信息,m为样本容量,对车辆的运动状态数据集的贡献度进行推算,得到车辆的运动状态数据集的贡献度数据信息;
13、u22.基于所述车辆的运动状态数据集的贡献度数据信息,按贡献度的升序进行排列,将车辆的运动状态数据集划分为训练数据集train与验证数据集val,
14、
15、其中,xi为处理后的第i时刻的车辆的运动状态数据信息,xk为处理后的第k时刻的车辆的运动状态数据信息,m为样本容量,k为分界点,n为常量参数,得到车辆的运动状态的训练数据集和车辆的运动状态的验证数据集;
16、u23.基于所述车辆的运动状态的训练数据集,建立车辆运行质量的第一表征函数w1,
17、
18、其中,xi为处理后的第i时刻的车辆的运动状态数据信息,n为常量参数,r为车辆的运动状态的权重向量,α为车辆运行质量的第一表征参数,g为高纬特征空间函数,b为模型的偏置常量参数,对车辆运行质量的第一表征参数进行优化,得到优化后的车辆运行质量的第一表征参数数据信息,基于所述车辆的运动状态的验证数据集,建立车辆运行质量的第二表征函数w2,
19、
20、其中,xk为处理后的第k时刻的车辆的运动状态数据信息,k为分界点,n为常量参数,m为样本容量,δ为车辆运行质量的第二表征参数,b为模型的偏置常量参数,βk为优化因子,对车辆运行质量的第二表征参数进行优化,得到优化后的车辆运行质量的第二表征参数数据信息;
21、u24.基于所述优化后的车辆运行质量的第二表征参数数据信息和所述优化后的车辆运行质量的第一表征参数数据信息,建立贡献度验证的多元非线性回归r,
22、
23、其中,m为样本容量,xi为处理后的第i时刻的车辆的运动状态数据信息,γi为车辆运行质量的关系决定因子,α0为优化后的车辆运行质量的第一表征参数数据信息,δ0为优化后的车辆运行质量的第二表征参数数据信息,b为模型的偏置常量参数,f为多元关系向量回归函数,对车辆的运动状态与运行质量的相关性进行表征,得到车辆的运动状态与运行质量的相关性数据信息。
24、进一步的,所述高纬特征空间函数g为,
25、
26、其中,xi为处理后的第i时刻的车辆的运动状态数据信息,ηi为高维特征空间权重向量。
27、进一步的,所述多元关系向量回归函数f为,
28、
29、其中,xi为处理后的第i时刻的车辆的运动状态数据信息,α0为优化后的车辆运行质量的第一表征参数数据信息,δ0为优化后的车辆运行质量的第二表征参数数据信息。
30、进一步的,所述优化因子βk的约束条件为,
31、
32、进一步的,在步骤u3中,所述采用基于自适应反馈调节因子的神经网络算法对车辆运行质量进行表征包括:
33、u31.基于所述车辆的运动状态与运行质量的相关性数据信息,构建车辆的运动状态与运行质量的相关性数据集;
34、u32.将所述车辆的运动状态与运行质量的相关性数据集输入基于自适应反馈调节因子的神经网络模型进行训练和学习,确定神经元函数s,
35、
36、其中,y为车辆的运动状态与运行质量的相关性数据集,λ1、λ2和λ3为神经网络模型的自适应反馈调节因子,得到训练好的基于自适应反馈调节因子的神经网络模型;
37、u33.基于所述训练好的基于自适应反馈调节因子的神经网络模型,输入所述车辆的运动状态与运行质量的相关性数据信息,对车辆运行质量进行表征,得到车辆的运行质量数据信息。
38、进一步的,所述车辆的运行质量评估函数f为,
39、
40、其中,z为车辆的运行质量数据信息,μ1、μ2和μ3为车辆的运行质量的评估因子。
41、为了实现上述目的及其他相关目的,本发明还提供了一种l4级别自动驾驶车辆的数据处理系统,包括计算机设备,该计算机设备被编程或配置以执行任意一项所述的l4级别自动驾驶车辆的数据处理方法的步骤。
42、为了实现上述目的及其他相关目的,本发明还提供了一种计算机可读存储介质,该计算机可读存储介质上存储有被编程或配置以执行任意一项所述的l4级别自动驾驶车辆的数据处理方法的计算机程序。
43、本发明具有以下积极效果:
44、1.本发明通过训练好的基于贡献度验证的多元非线性回归模型,对车辆的运动状态与运行质量的相关性进行表征,并结合基于自适应反馈调节因子的神经网络算法对车辆运行质量进行表征,不仅能够对车辆的数据进行精确的处理,而且自动驾驶车辆与平台的通信以及数据包的云端上传不需要依赖于专网实现,通过公网便可实现功能,可以缩减项目建设成本。
45、2.本发明通过构建车辆的运行质量评估函数f,对车辆的运行质量进行评估,不仅能够对l4级别自动驾驶车辆进行进一步的处理,而且能够完成驾驶任务并监控驾驶环境,这个阶段下,驾驶相关的所有任务和驾乘人已经没关系,l4级别的自动驾驶技术是行业内未来的发展方向。
- 还没有人留言评论。精彩留言会获得点赞!