标定板像素坐标与世界坐标自动排序方法和工业相机与流程
本发明涉及工业相机,特别涉及一种标定板像素坐标与世界坐标自动排序方法和工业相机。
背景技术:
1、机器视觉技术显著提升了产品尺寸测量的便利性和精度,其中工业相机的标定是关键环节。其中,工业上常用棋盘格或圆形标定板来标定相机参数,标定板上的特征点呈规律排列,具有明确的行列坐标信息。然而,在实际标定过程中,标定板的摆放位置可能多种多样,包括正放或倾斜,这导致提取到的特征点行列坐标信息变得无序。此外,复杂的现场环境可能导致部分特征点缺失,进一步影响特征点排序的准确性。
2、目前,一些测量系统通过手动方式将特征点的像素坐标与世界坐标匹配起来,增加了像素坐标与世界坐标匹配时操作的复杂性,或者在特征点缺失的情况下降低了像素坐标与世界坐标自动匹配的成功率。
技术实现思路
1、本发明的主要目的是提出一种标定板像素坐标与世界坐标自动排序方法和工业相机,旨在通过实现像素坐标与世界坐标自动排序,提升像素坐标与世界坐标匹配的成功率。
2、为实现上述目的,本发明提出的标定板像素坐标与世界坐标自动排序方法,包括:
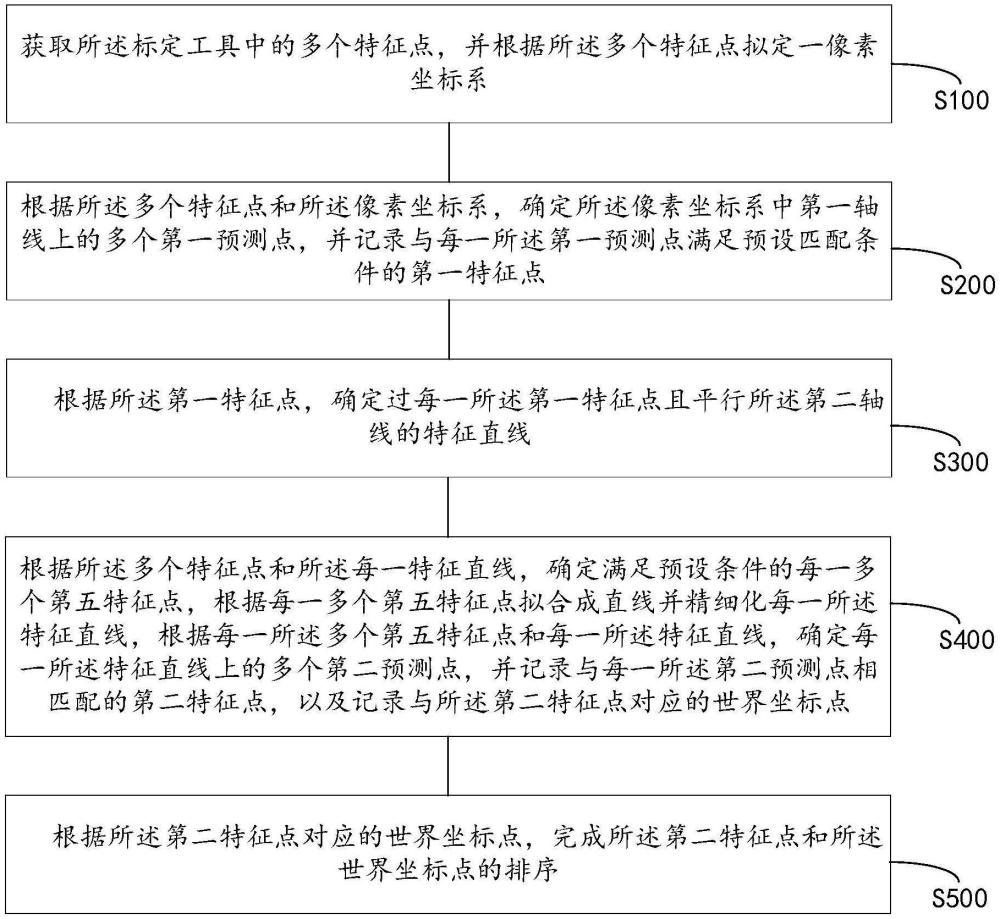
3、获取所述标定工具中的多个特征点,并根据所述多个特征点拟定一像素坐标系,所述像素坐标系包括第一轴线和第二轴线,所述多个特征点包括第一特征点和第二特征点;
4、根据所述多个特征点和所述像素坐标系,确定所述像素坐标系中第一轴线上的多个第一预测点,并记录与每一所述第一预测点满足预设匹配条件的第一特征点;
5、根据所述第一特征点,确定过每一所述第一特征点且平行所述第二轴线的特征直线;
6、根据所述多个特征点和所述每一特征直线,确定满足预设条件的每一多个第五特征点,根据每一多个第五特征点拟合成直线并精细化每一所述特征直线,根据每一所述多个第五特征点和每一所述特征直线,确定每一所述特征直线上的多个第二预测点,并记录与每一所述第二预测点相匹配的第二特征点,以及记录与所述第二特征点对应的世界坐标点;
7、根据所述第二特征点对应的世界坐标点,完成所述第二特征点和所述世界坐标点的排序。
8、在一实施例中,所述获取所述标定工具中的多个特征点,并根据所述多个特征点确定像素坐标系的方法具体包括:
9、根据所述多个特征点中的任意三者,确定第一坐标系;
10、根据所述多个特征点和所述第一坐标系的第一轴线,确定与所述第一坐标系的第一轴线的距离误差小于第一预设误差的多个第三特征点,并将所述多个第三特征点拟合成所述像素坐标系的第一轴线,所述第一预设误差等于所述第一坐标系的第一轴线中的坐标点与所述第一坐标系的原点的距离乘以预设距离误差系数;
11、根据所述多个特征点和所述第一坐标系的第二轴线,确定与所述第一坐标系的第二轴线的距离误差小于第二预设误差的多个第四特征点,并将所述多个第四特征点拟合成所述像素坐标系的第二轴线,所述第二预设误差等于所述第一坐标系的第二轴线中的坐标点与所述第一坐标系的原点的距离乘以预设距离误差系数。
12、在一实施例中,所述根据所述多个特征点和所述像素坐标系,确定所述像素坐标系中第一轴线上的多个第一预测点的方法具体包括:
13、初始化第一距离参数、第一迭代次数和第一方向参数,所述第一距离参数为第一预测点与所述像素坐标系的原点的距离,所述第一迭代次数为所述像素坐标系的第一轴线上的第一预测点的生成迭代次数,所述第一方向参数为第一预测点的方向参数;
14、以所述像素坐标系的原点为起始点,根据所述第一距离参数和第一方向向量的乘积,于所述第一轴线上生成对应的第一预测点;
15、以所述像素坐标系的第一轴线的原点为起始点,朝所述第一方向参数所表征的方向,判断多个所述第三特征点中与所述第一预测点满足预设匹配条件的第一特征点,所述预设匹配条件为特征点与预测点的距离误差小于第三预设误差;
16、在确定存在第一特征点与所述第一预测点满足预设匹配条件时,更新下一个第一预测点的第一距离参数,并从所述多个所述第三特征点中移除已匹配的第一特征点;
17、在确定不存在第一特征点与所述第一预测点满足预设匹配条件时,判断所述第一预测点是否在第一预设限制范围内,若是,更新下一个第一预测点的第一距离参数和第一迭代次数;若否,改变所述第一方向参数,并重新初始化所述第一距离参数和所述第一迭代次数,且返回重复执行以所述像素坐标系的原点为起始点,根据所述第一距离参数和第一方向向量的乘积,于所述第一轴线上生成对应的第一预测点;以所述像素坐标系的第一轴线的原点为起始点,朝所述第一方向参数所表征的方向,判断与所述第一预测点满足预设匹配条件的第一特征点的步骤。
18、在一实施例中,在确定存在第一特征点与所述第一预测点满足预设匹配条件时,更新后的下一个第一预测点的第一距离参数等于上一个第一特征点与所述像素坐标系的原点之间的距离加所述第一方向参数乘以第一方向向量乘以基准距离乘以缩放系数的n次方,n为当前第一迭代次数;
19、在确定不存在第一特征点与所述第一预测点满足预设匹配条件时,更新后的下一个第一预测点的第一距离参数等于上一个第一预测点的第一距离参数加所述第一方向参数乘以第一方向向量乘以基准距离乘以缩放系数的n次方,n为当前第一迭代次数;以及,
20、更新后的第一迭代次数等于当前第一迭代次数加1。
21、在一实施例中,所述以所述像素坐标系的第一轴线的原点为起始点,朝所述第一方向参数所表征的方向,判断与所述第一预测点满足预设匹配条件的第一特征点具体包括:
22、从多个所述第三特征点中找出与所述第一预测点距离误差小于第三预设误差的候选特征点;
23、在所述候选特征点中,选择与所述第一预测点距离最小的候选特征点作为第一特征点,并与所述第一预测点进行匹配。
24、在一实施例中,所述缩放系数的计算方法包括:
25、获取多个所述第三特征点在第一轴线上的投影点集;
26、对所述投影点集与所述像素坐标系的原点构成的向量和第一轴线的第一方向对应的单位向量进行内积运算,并根据内积由小到大对所述投影点集进行排序;
27、对所述第三特征点根据以上内积由小到大进行排序;
28、依次计算所述投影点集中相邻两个投影点之间的像素间距;
29、计算所述相邻两个相邻的像素间距的比值,作为所述缩放系数;
30、所述缩放系数的计算方法包括:
31、统计所有相邻两个像素间距的比值,选择满足预设条件的比值进行统计并计算满足预设条件的比值的平均值,作为最终的缩放系数。
32、在一实施例中,所述根据所述多个特征点和所述每一特征直线,确定满足预设条件的每一多个第五特征点,根据每一多个第五特征点拟合成直线并精细化每一所述特征直线,根据每一所述多个第五特征点和每一所述特征直线,确定每一所述特征直线上的多个第二预测点,并记录与每一所述第二预测点相匹配的第二特征点,以及记录与所述第二特征点对应的世界坐标点的方法包括:
33、初始化第二距离参数、第二迭代次数和第二方向参数,所述第二距离参数为第二预测点与所述第一特征点的距离,所述第二迭代次数为所述特征直线上的第二预测点的生成迭代次数,所述第二方向参数为第二预测点的方向参数;
34、以所述特征直线与第一轴线的交点为起始点,根据所述第二距离参数和第二方向向量的乘积,于所述特征直线上生成对应的第二预测点;
35、以所述特征直线与第一轴线的交点为起始点,朝所述第二方向参数所表征的方向,判断多个所述第五特征点中与所述第二预测点满足预设匹配条件的第二特征点,所述预设匹配条件为特征点与预测点的距离误差小于第四预设误差;
36、在确定存在第二特征点与所述第二预测点满足预设匹配条件时,记录所述第二特征点,和记录与所述第二特征点对应的世界坐标点,并更新下一个第二预测点的第二距离参数,以及从所述多个所述第五特征点中移除已匹配的第二特征点;
37、在确定不存在第二特征点与所述第二预测点满足预设匹配条件时,判断所述第二预测点是否在第二预设限制范围内,若是,更新下一个第二预测点的第二距离参数和第二迭代次数;若否,改变所述第二方向参数,并重新初始化第二距离参数和第二迭代次数,且返回重复执行以所述特征直线与第一轴线的交点为起始点,根据所述第二距离参数和第二方向向量的乘积,于所述特征直线上生成对应的第二预测点;
38、以所述特征直线与第一轴线的交点为起始点,朝所述第二方向参数所表征的方向,判断多个所述第五特征点中与所述第二预测点满足预设匹配条件的第二特征点的步骤。
39、在一实施例中,在确定存在第二特征点与所述第二预测点满足预设匹配条件时,更新后的下一个第二预测点的第二距离参数等于上一个第二特征点与所述特征直线与第一轴线交点之间的距离加所述第二方向参数乘以第二方向向量乘以基准距离乘以缩放系数的n次方,n为当前第二迭代次数;
40、在确定不存在第一特征点与所述第二预测点满足预设匹配条件时,更新后的下一个第二预测点的第二距离参数等于上一个第二预测点的第二距离参数加所述第二方向参数乘以第二方向向量乘以基准距离乘以缩放系数的n次方,n为当前第二迭代次数;以及,
41、更新后的第二迭代次数等于当前第二迭代次数加1。
42、在一实施例中,所述根据所述第二特征点对应的世界坐标点,完成所述第二特征点和所述世界坐标点的排序的方法包括:
43、初始化世界坐标系的原点和单位长度,所述原点为所述像素坐标系的原点对应的世界坐标,所述单位长度为预设的世界间距;
44、根据所述像素坐标系的第一轴线,确定世界坐标系的第一轴线;
45、根据所述像素坐标系的第二轴线,确定世界坐标系的第二轴线;
46、根据所述第二特征点对应的世界坐标点,以第一排序逻辑完成所述第二特征点和所述世界坐标点的自动排序,所述第一排序逻辑包括从所述第一轴线至所述第二轴线。
47、本发明还提出一种工业相机,所述工业相机包括控制器,所述控制器用于实现如上文任一项所述的标定板像素坐标与世界坐标自动排序方法。
48、本发明提供的标定板像素坐标与世界坐标自动排序方法,显著提升了特征点匹配的准确性和鲁棒性。首先,通过图像处理技术获取标定工具中的多个特征点并构建像素坐标系和世界坐标系,为后续步骤提供了基础参考。接着,系统生成第一轴线上的多个第一预测点,并通过预设匹配条件筛选出与预测点匹配的第一特征点,这一步骤减少了无序特征点的影响,提高了特征点匹配的准确性。随后,系统生成过第一特征点且平行第二轴线的特征直线,确保了特征直线的生成具有较高的准确性和一致性,进一步增强了后续步骤的鲁棒性。随后,系统生成每条特征直线上的多个第二预测点,并通过预设匹配条件筛选出与预测点匹配的第二特征点,进一步减少了无序特征点的影响,提高了特征点匹配的准确性。最后,系统根据确定第二特征点,以及同时与第二特征点同时生成的对应的世界坐标,以世界坐标先第一轴线后第二轴线的排序方式完成第二特征点的排序。如此,本发明不仅实现了自动化排序和匹配,还有效应对了特征点缺失和标定板摆放位置不固定的问题,显著提升了标定的效率和精度,适用于多种标定板和复杂现场环境,具有广泛的适用性和高精度。
- 还没有人留言评论。精彩留言会获得点赞!