精子识别方法、系统、装置、计算机设备和可读存储介质与流程
本技术涉及计算机,特别是涉及一种精子识别方法、系统、装置、计算机设备、计算机可读存储介质和计算机程序产品。
背景技术:
1、noa(non-obstructive azoospermia,noa,非阻塞性无精症)是一种男性不育症,其特点是睾丸无法正常产生足够数量的精子而在精液中缺乏精子。noa可以是由多种因素引起的,包括遗传、环境、炎症和药物等因素。为了帮助这些夫妇通过体外受精受孕,手术医生需要通过显微外科睾丸精子提取术(microsurgical testicular sperm extraction,microtese)获取睾丸标本,显微镜下确定精子存在后将精子冷冻保存或择期从睾丸中提取精子,然后将精子通过卵胞浆内单精子注射,以实现受精。
2、然而,在当前的临床实践中microtese取精后存在精子识别效率不高的问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高精子识别效率的精子识别方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供了一种精子识别方法,应用于精子识别系统,精子识别系统包括装载有三轴电控载物台的倒置显微镜,包括:
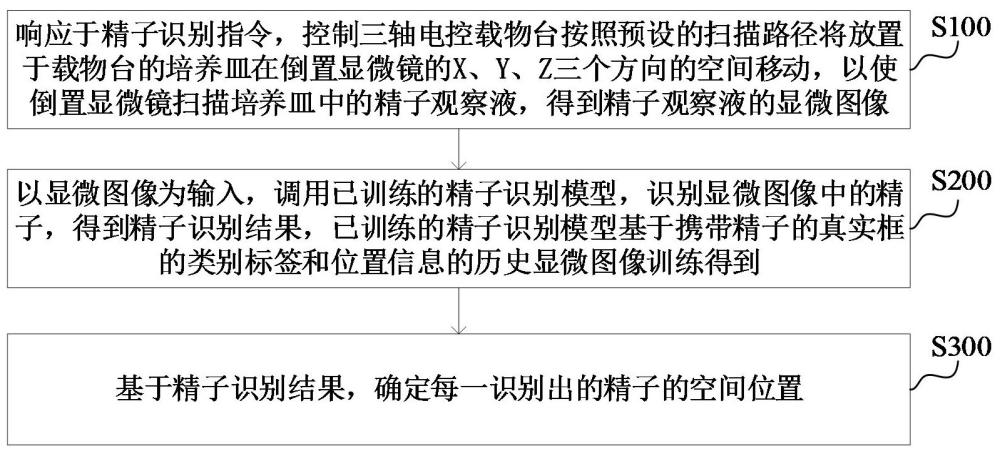
3、响应于精子识别指令,控制三轴电控载物台按照预设的扫描路径将放置于载物台的培养皿在倒置显微镜的x、y、z三个方向的空间移动,以使倒置显微镜扫描培养皿中的精子观察液,得到精子观察液的显微图像;
4、以显微图像为输入,调用已训练的精子识别模型,识别显微图像中的精子,得到精子识别结果,已训练的精子识别模型基于携带精子的真实框的类别标签和位置信息的历史显微图像训练得到;
5、基于精子识别结果,确定每一识别出的精子的空间位置。
6、在其中一个实施例中,精子识别结果包括精子的位置、长度、宽度和头部形状,显微图像的数量为多张,得到精子识别结果之后,方法还包括:
7、针对每一精子,根据多张显微图像的精子识别结果中精子的位置,确定精子的运动轨迹;
8、根据精子的长度、宽度和头部形状,确定精子的形态特征得分;
9、根据精子的运动轨迹,确定精子的运动能力得分;
10、基于形态特征得分以及运动能力得分得到,确定精子的质量评分。
11、在其中一个实施例中,确定精子的质量评分之后,方法还包括:
12、基于各精子的形态特征得分、运动能力得分以及质量评分,生成精子质量评估报告。
13、在其中一个实施例中,在基于已训练的精子识别模型识别显微图像中的精子,得到精子识别结果之前,方法还包括:
14、获取精子观察液的历史显微图像,标注历史显微图像中的精子的真实框的类别和位置信息,得到训练集;
15、构建初始精子识别模型;
16、以训练集为输入,调用初始精子识别模型,确定预测框的类别、位置信息和置信度,预测框用于表示历史显微图像中的精子的所在区域;
17、基于真实框的类别和位置信息,以及预测框的类别、位置信息和置信度,确定预测框和真实框之间的误差;
18、基于误差,迭代更新初始精子识别模型的参数,直至达到预设的训练结束条件,得到已训练的精子识别模型。
19、在其中一个实施例中,包括:确定预测框和真实框之间的误差,包括:
20、确定预测框和真实框之间的分类损失、定位损失和置信度损失;
21、基于分类损失、定位损失和置信度损失,确定预测框和真实框之间的误差。
22、在其中一个实施例中,得到已训练的精子识别模型之后,方法还包括:
23、基于标注有精子的真实框的类别和位置信息的历史显微图像,构建测试集;
24、以测试集为输入,调用已训练的精子识别模型,识别历史显微图像中的精子,得到历史精子识别结果;
25、基于历史精子识别结果,确定测试集中每一历史显微图像的精子检测准确率;
26、根据各历史显微图像的精子检测准确率,确定已训练的精子识别模型的目标检测准确率;
27、在目标检测准确率小于预设的目标准确率阈值的情况下,调整已训练的精子模型的结构。
28、第二方面,本技术还提供了一种精子识别系统,包括三轴电控载物台、控制器、倒置显微镜以及数据处理模块,三轴电控载物台连接控制器、且设置倒置显微镜上,倒置显微镜与数据处理模块连接;
29、控制器,响应于数据处理模块的精子识别指令,控制三轴电控载物台按照预设的扫描路径将放置于载物台的培养皿在倒置显微镜的x、y、z三个方向的空间移动;
30、倒置显微镜,用于扫描培养皿中的精子观察液,得到精子观察液的显微图像,将显微图像发送至数据处理模块;
31、数据处理模块,用于发送精子识别指令至控制器,采用上述精子识别方法,识别显微图像中的精子,确定每一识别出的精子的空间位置。
32、在其中一个实施例中,三轴电控载物台包括连接板、z轴运动机构、y轴运动机构、x轴运动机构、载物平台以及z轴运动微调旋钮;
33、三轴电控载物台通过连接板连接于倒置显微镜的基座,载物平台、x轴运动机构以及y轴运动机构依次层叠设置,z轴运动机构设置于y轴运动机构和连接板之间,分别与y轴运动机构和连接板连接,z轴运动微调旋钮设置于z轴运动机构。
34、第三方面,本技术还提供了一种精子识别装置,包括:
35、精子观察液扫描模块,用于响应于精子识别指令,控制三轴电控载物台按照预设的扫描路径将放置于载物台的培养皿在倒置显微镜的x、y、z三个方向的空间移动,以使倒置显微镜扫描培养皿中的精子观察液,得到精子观察液的显微图像;
36、精子识别模块,用于以显微图像为输入,调用已训练的精子识别模型,识别显微图像中的精子,得到精子识别结果,已训练的精子识别模型基于携带精子的真实框的类别标签和位置信息的历史显微图像训练得到;
37、空间位置确定模块,用于基于精子识别结果,确定每一识别出的精子的空间位置。
38、第四方面,本技术还提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述任意一项精子识别方法实施例中的步骤。
39、第五方面,本技术还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述任意一项精子识别方法实施例中的步骤。
40、第六方面,本技术还提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述任意一项精子识别方法实施例中的步骤。
41、上述精子识别系统,通过倒置显微镜上搭载三轴电控载物台,连接控制器与三轴电控载物台。在控制器响应于精子识别指令时,控制三轴电控载物台按照预设的扫描路径将放置在载物台上的培养皿,在倒置显微镜的x、y、z三个方向的空间移动,以使倒置显微镜扫描培养皿中的精子观察液,通过调整培养皿的位置,对应改变了显微镜的焦距和扫描区域,无需进行繁琐的显微镜调整工作,实现了精子观察液的自动化扫描过程,区别于现有的人工调整显微镜焦距和坐标的方法,提高了调整的精度和平稳度,降低了人工扫描过程中因长时间手动操作造成疲劳使得扫描不准确的可能性,从而,提升了精子观察液的扫描效率、扫描精度和准确度。
42、上述精子识别方法、系统、装置、计算机设备、计算机可读存储介质和计算机程序产品,通过电控自动化的方式控制精子识别系统系统中的三轴电控载物台移动,实现置于载物台上的培养皿在x、y、z三个方向的位置的自动化精准调整,以使得倒置显微镜的扫描范围能够覆盖培养皿中精子观察液的全域,得到多张精子观察液的显微图像,有利于提高精子识别的准确性,并且,结合目标检测识别精子,在扫描得到精子观察液的显微图像后,根据基于携带精子的真实框的类别标签和位置信息的历史显微图像训练得到精子识别模型,识别显微图像中的精子,得到识别结果,根据精子识别结果,确定识别出的每一精子的空间位置,一方面,通过精子识别模型自动识别显微图像中的精子,大幅减少了检测时间,降低了操作人员的工作负担,降低人工检测过程中疲劳漏检的可能性,提高了精子识别效率和准确度;另一方面,通过精子识别结果快速准确地定位精子的空间位置,有利于根据识别出精子的空间位置,评估精子质量以提取精子样本,辅助体外受精等医疗程序,从而有利于提高体外受精等医疗程序的成功率。
- 还没有人留言评论。精彩留言会获得点赞!