噪声环境下基于ViTCapsNet网络的变工况迁移轴承故障诊断方法
本发明涉及故障智能诊断技术,具体涉及一种噪声环境下基于vitcapsnet网络的变工况迁移轴承故障诊断方法。
背景技术:
1、旋转机械是机械工程领域应用最为广泛的机械设备类型,同时旋转机械也是机械设备出现故障较多的部位。轴承作为旋转机械的核心部件之一,是频繁出现故障的部位,机械设备中有将近40%的故障是由轴承故障造成的,因此对轴承进行有效的故障诊断是非常有意义的。
2、轴承的工作环境较为复杂,容易被噪声干扰,通过加速度传感器收集到的特征振动信号会受到噪声的干扰,当噪声增加到一定程度时,振动信号的故障冲击产生的特征会被杂乱的噪声淹没,这给智能故障诊断工作带来很大的难度。在此种情况进行故障诊断,需要在噪声环境下提取到准确的故障特征,避免轴承故障恶化,影响设备的运行效率。
3、在实际应用场景中,除了噪声之外,经常还会遇到工况变化或出现新的故障类型的问题。传统的故障诊断方法的训练集和测试集的特征分布是相同的,导致模型的泛化能力低,适应能力差,如果遇到新的故障类型,历史训练模型无法对新工况下的故障进行准确的诊断分类。为了适应不断产生的新工况,需要结合迁移学习提高模型的泛化能力 ,保障故障诊断的实时性,确保轴承安全稳定的运行。
技术实现思路
1、发明目的:本发明的目的在于解决现有技术中存在的不足,提供一种噪声环境下基于vitcapsnet网络的变工况迁移轴承故障诊断方法。
2、技术方案:本发明的一种噪声环境下基于vitcapsnet网络的变工况迁移轴承故障诊断方法,包括以下步骤:
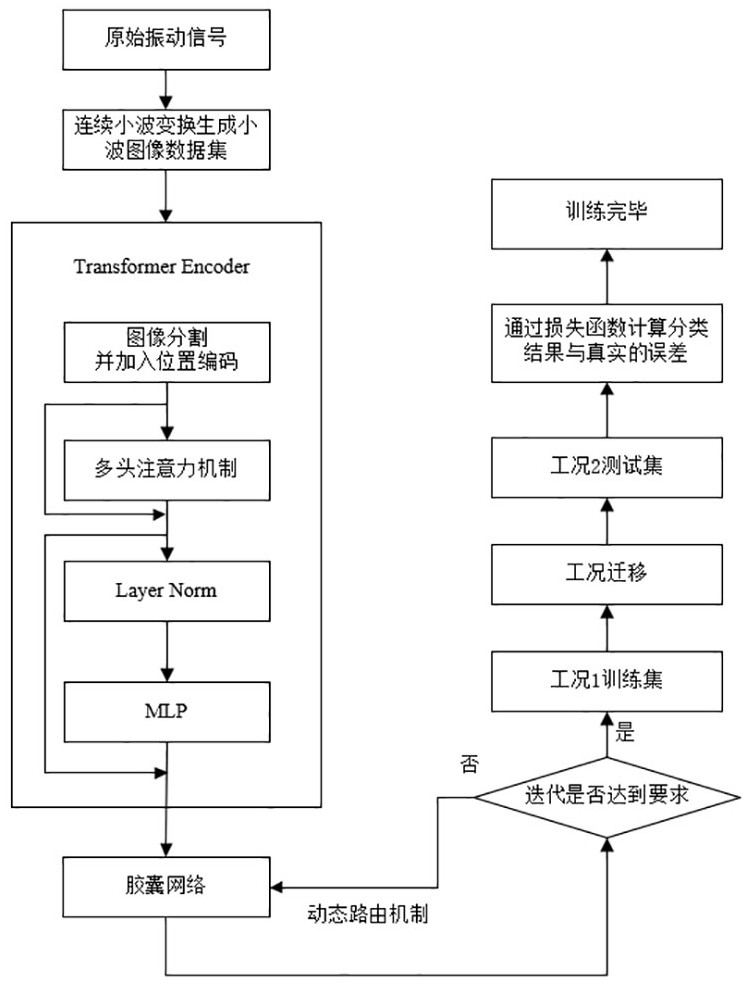
3、步骤1、首先获取25.6khz采样频率下轴承振动信号;然后向轴承振动信号数据集加入不同信噪比的高斯白噪声,对添加噪声后的轴承振动信号数据先采用滑动窗口方法进行数据增强;接着将增强后的数据使用连续小波变换进行时频变换转换成二维小波时频图像,将所有二维小波时频图像划分训练集和测试集(设置每个样本的长度为784,重叠的数据长度为300);此处进行时频变换时可设置小波基为“cmor3-3”,将非线性、非平稳的振动信号转换成二维小波时频图像,这样可以更准确地表达非线性和非平稳信号的信息;
4、步骤2、构建vitcapsnet网络故障诊断模型,使用训练集对vitcapsnet网络故障诊断模型进行训练,所述vitcapsnet网络故障诊断模型依次包括两部分:基于vit注意力机制的编码器encoder模块和胶囊网络capsnet;
5、步骤2.1、构建基于vit注意力机制的编码器encoder模块,将步骤1所得二维小波时频图像输入使用训练好的编码器encoder模块,提取全局特征(得到全局信息),具体方法为:
6、步骤2.1.1、输入编码器encoder模块前,先通过embeddings模块将二维时频图像进行图像分割,转换成一维时序序列,并添加可学习的位置编码和类标记class token,得到嵌入式序列;
7、步骤2.1.2、首先,通过多个缩放点积注意力层的多头注意力机制来计算所得嵌入式序列的相似性,依据相似性分配权重来分配权重,并将各个权重聚合叠加得到;
8、然后,搭建多层感知机mlp(提取注意力机制得到的权重结果),多层感知机mlp包括两个全连接(fc)层,第一个fc层将原有的维度扩展到原有维度的4倍,利用gelu激活函数来增强模型的表达能力,第二个fc层将维度恢复到原始维度,这样会避免过于复杂而导致的过拟合问题;
9、本发明使用残差连接、ln层和dropout层将多头注意力机制和mlp进行连接(编码器中先经过归一化,然后经过多头注意机制,经过一层dropout层,然后通过残差连接将输入block的特征与dropout层后的特征进行融合,在经过归一化,归一化之后输入到mlp层进行全连接,构成独立的编码器encoder block),使用残差连接可以解决梯度爆炸的问题,ln层可以提高模型的鲁棒性,dropout层可以提高模型的泛化能力,依靠现有的连接方式可以加快模型的训练速度并提高模型运行的稳定性;
10、最后,循环运行4次基于vit注意力机制编码器encoder模块,获得全局特征,将得到最终的结果进行数据转换作为下一步的输入;
11、步骤2.2、构建胶囊网络capsnets,利用胶囊网络的动态路由机制来进行故障诊断分类;
12、步骤3、使用步骤1的测试集对vitcapsnet网络故障诊断模型进行故障诊断效果测试,经过训练后的vitcapsnet网络故障诊断模型内部权值和耦合系数等参数固定,进而使用其他负载下的数据对模型的诊断效果进行验证,绘制与其他模型的诊断对比箱型图以及混淆矩阵,展示vitcapsnet网络故障诊断模型的性能;
13、步骤4、验证vitcapsnet网络故障诊断模型在不同噪声下的诊断效果,在相同迁移情况下使用不同噪声下进行多次实验,具体来说是在srn=5的情况下进行变工况迁移实验,在0nm到2nm的迁移情况下进行不同噪声的对比实验,绘制小提琴图和箱型图来观察故障诊断的效果;
14、步骤5、引入梯度加权类激活热力图grad-cam对编码器encoder模块提取的特征进行可视化,grad-cam方法利用最终预测结果中的最大值或者最小值计算输入胶囊网络特征图的反向梯度,将每一个通道的特征图与相对应通道的梯度进行加权相乘,然后对梯度进行平均池化,得到一个单一的热力图,用于显示vitcapsnet网络故障诊断模型对于预测结果的关注区域。
15、进一步地,所述步骤1中添加的高斯白噪声公式如下:
16、;
17、上式中,信噪比snr的计算公式为:
18、;
19、其中,、分别表示原始信号的功率和噪声的功率;
20、最终,加入高斯白噪声后的振动信号与原始振动信号的关系如下:;
21、对加入噪声后的振动信号进行连续小波变换的公式如下:
22、;
23、式中,代表被分析信号与小波两者之间的相似程度,n是时间变量、是尺度参数,是位移参数。
24、进一步地,所述步骤2.1.1中embeddings模块将二维小波时频图像线性投影到一维空间中,生成patch token的具体方法为:
25、输入二维小波时频图像被分割成大小为的补丁;然后这些补丁由嵌入层嵌入,设置嵌入补丁的维度是784,设置输入为,经过embeddings模块分割图像后,获得49个patch token;此时在patch token序列的后面添加一个可训练的位置编码,并加入类标记来帮助模型来识别故障的分类,得到编码器encoder模块的输入形状,加入类标记和位置编码后得到编码器encoder模块的输入,公式如下:
26、;
27、式中,;
28、;
29、其中,(h,w)是原始二维小波时频图像的分辨率比,c是通道数,是分割后每一个图像块的大小,并且n是分割后得到patch的数量;表示类标记,表示patchtoken,表示生成的二维矩阵,表示位置编码的嵌入。
30、进一步地,所述编码器encoder模块包括多头注意力机制、mlp层、残差连接、归一化ln层以及dropout层,嵌入式序列输入编码器encoder模块经处理后最终输出全局特征;具体过程是:
31、对于一维嵌入式序列,包括多头注意力机制的各个缩放点积注意力先计算query和key的点积,再除以缩放因子,再乘以value,最后通过softmax函数计算权重,再与value的值进行相乘,公式如下:
32、;
33、;
34、式中,是输入矩阵向量的维度;
35、多头注意力机制独立学习得到h组不同的线性映射投影来变换query、key和value,再传入到注意力机制中进行处理,最后将特征进行融合,公式如下:;
36、式中,表示串联多个注意力头的线性投影;
37、;
38、式中,,,表示输入嵌入通过不同的线性投影得到不同的查询、键和值;
39、残差连接在多层网络训练中可以使使网络简化,ln层可以保证特征分布的稳定性,加快模型的收敛速度,公式如下:
40、;
41、将上述所得输入多层感知机mlp,在第一个全连接层中,mlp利用gelu激活函数来增强注意力机制,保留的注意力权重较大的部分并抑制注意力中权重较小的部分,这样就可以更好的保留有价值的故障分类信息,gelu激活函数公式如下:
42、;
43、通过dropout层去掉冗余的信息,减少模型的复杂度,防止过拟合,以上是4个block中的其中一个,要循环进行4次block堆栈,最终得到全局特征。
44、进一步地,所述步骤2.2的胶囊网络包括初级胶囊层和数字胶囊层,初级胶囊和数字胶囊之间通过动态路由机制来传递特征之间的权重信息;所述初级胶囊层将所得全局特征作二维卷积转换为多个初级胶囊,数字胶囊层提取局部特征和空间信息,来进行故障诊断,具体方法为:
45、首先搭建初级胶囊层,将全局特征转换为初级胶囊层每一个胶囊的长度为16;
46、其次,设置第 l层的第 r个胶囊的输出向量记为,并设置转换矩阵,使用转换矩阵来连接第l层的第 r个胶囊和第 l+1层的第 j个胶囊,公式如下:
47、,;
48、通过动态路由机制对线性变换的结果进行处理,得到第 l+1层的第 j个胶囊的总和,公式如下:;
49、式中,是由动态路由迭代过程确定的耦合系数,且胶囊 r与第l+1层中所有胶囊之间的耦合系数总和为1,通过对计算确定,公式如下:
50、;;
51、式中,是胶囊 r应耦合到胶囊 j的对先验概率,其初始值为0;
52、最后,利用自定义的非线性函数squash来保证胶囊的长的压缩在0到1之间,同时保持向量方向的不变,公式如下:
53、;
54、式中表示胶囊的输出向量,表示范数;
55、在动态路由机制中,能够与其他权值一起学习并得到更新,其取值取决于初级胶囊与数字胶囊的方向和大小,公式如下:
56、;
57、如果和的乘积越大,代表特征之间存在很强的局部联系,动态路中的耦合系数就会增加,得到的会随之增大,使得到的增大,胶囊的长度越长,就可以更好的代表故障类别;
58、由于要处理的多分类的问题,要把胶囊网络输出的预测值转换成概率,使用softmax函数来进行多分类,将输出转换为概率,公式如下:
59、。
60、本发明的胶囊网络利用动态路由机制计算初级胶囊与数字胶囊之间的权重值来判别信息是否重要,将重要信息进行保留,非重要信息息进行丢弃。具体来说,如果预测向量与上层向量的输出具有较大的向量积,则通过自上而下的反馈,增大上层胶囊的耦合系数,并降低其他胶囊的耦合系数,可以学习到更多的故障特征;反之,预测值较小时,得到的计算值趋近于0,无法进行下一步计算。
61、进一步地,所述步骤3对vitcapsnet网络故障诊断模型进行训练和测试时,为得到真实值与预测值之间的误差,使用的损失函数是交叉熵损失函数,公式如下:
62、。
63、进一步地,所述步骤5使用梯度加权类激活热力图grad-cam对使用的注意力的方法进行可视化,得到梯度的公式如下所示,
64、
65、
66、式中,表示前向传播得到的类别c所对应的分类概率,表示特整层a上第k个通道上第的特征,表示类别c对应特定的特征图取得的梯度信息,此过程的目的是将得到的梯度信息进行全局平均池化,得到重要权重;
67、最后,将得到的梯度权重进行加权求和,然后通过进行输出,公式如下:
68、。
69、有益效果:本发明有效地增强提取特征的能力,是模型能够在加入噪声后的特征中有效地提取重要信息;同时,在相同噪声的约束条件下,模型可以在工况改变的情况仍然准确地进行故障诊断;最后,引入视觉分析技术中的grad-cam方法对模型提取的有效信息进行可视化,增强了智能故障诊断内部的可解释性。
- 还没有人留言评论。精彩留言会获得点赞!