一种火箭级间分离大范围部件机动的高动态流场仿真方法与流程
本发明属于计算流体力学,涉及一种火箭级间分离大范围部件机动的高动态流场仿真方法。
背景技术:
1、在航天航空领域,含有部件大范围运动的非定常流动过程是一类重要的流体-运动耦合问题,广泛存在于级间分离、挂载分离等过程中。处理此种运动范围较大的边界运动问题中的主要方法一是重叠动网格技术,该方法首先划分出一个覆盖完整计算域的背景网格,并为每个运动部件周围划分一块独立的、跟随部件运动的网格,通过网格之间的重叠区的插值实现流场的演化。二是采用网格变形与局部重构相结合的方法。分离仿真过程中,可将动边界周围一定范围设成网格变形区,该区网格随着边界的运动而变形,当出现严重扭曲的网格单元时,重新生成变形区内的网格,即进行局部网格重构,此过程中流动参数通过插值运算从旧网格映射得到。重叠动网格方法与变形-重构混合方法具备各自的优势:前者能够适应多种场景下的运动部件非定常流动仿真,但是求解过程中需引入网格重叠区的分区、挖洞、寻点、插值以及由于并行计算引入的并行重叠网格实现,带来较大计算量和复杂的网格处理,对程序开发和优化带来较大挑战,同时重叠动网格方法对网格单元尺度较为敏感,往往要求网格重叠区的单元尺度彼此量级一致,对前处理过程带来较高要求。变形重构混合动网格技术由于仿真过程中始终在一套网格内进行,并且具备自动化的网格重构能力,前处理过程和计算程序开发更容易实现,但此种方法的一个重要瓶颈是网格变形过程如果难以保持较好的网格单元质量,导致计算过程收敛较慢,从而带来频繁的网格重构,使计算效率和计算精度难以满足设计需求。
2、近年来,随着新型运载火箭级间分离技术的提出和应用,较多出现了不同维度上尺度差异较大的运动部件,如壳体破片、喷管等,通常为薄壁结构类型。若采用重叠动网格方法,其部件网格块和背景网格块的网格单元尺度相差较大,为此需要在前处理过程中对壳体边缘区域和缝隙区域进行较多人工干涉,带来仿真工作难度提高和周期延长。为此,有必要建立一种能够保持较高网格单元质量的网格变形方法,使变形-重构混合动网格方法能够适应薄壁结构部件大范围运动问题。
技术实现思路
1、本发明解决的技术问题是:本发明针对网格变形动网格存在的网格变形过程计算量大、鲁棒性不足、边界条件类型随时间切换的难题,提出一种火箭级间分离大范围部件机动的高动态流场仿真方法,实现了对火箭级间分离大范围部件机动过程这一复杂场景的高效建模,提高了仿真效率和鲁棒性。
2、本发明解决技术的方案是:一种火箭级间分离大范围部件机动的高动态流场仿真方法,包括以下步骤:
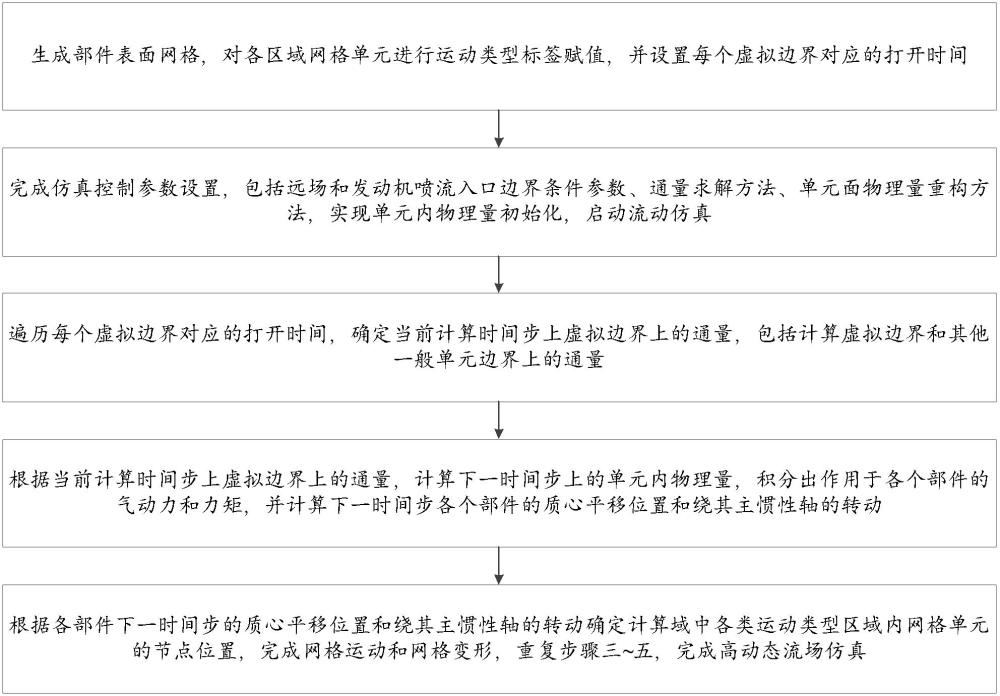
3、s1、生成部件表面网格,对各区域网格单元进行运动类型标签赋值,并设置每个虚拟边界对应的打开时间;
4、s2、完成仿真控制参数设置,包括远场和发动机喷流入口边界条件参数、通量求解方法、单元面物理量重构方法,实现单元内物理量初始化,启动流动仿真;
5、s3、遍历每个虚拟边界对应的打开时间,确定当前计算时间步上虚拟边界上的通量,包括计算虚拟边界和其他一般单元边界上的通量;
6、s4、根据当前计算时间步上虚拟边界上的通量,计算下一时间步上的单元内物理量,积分出作用于各个部件的气动力和力矩,并计算下一时间步各个部件的质心平移位置和绕其主惯性轴的转动;
7、s5、根据各部件下一时间步的质心平移位置和绕其主惯性轴的转动确定计算域中各类运动类型区域内网格单元的节点位置,完成网格运动和网格变形,重复步骤s3~s5,完成部件机动的高动态流场仿真。
8、进一步的,生成部件表面网格,对各区域网格单元进行运动类型标签赋值,并设置每个虚拟边界对应的打开时间,具体包括:
9、s11,生成部件表面网格;
10、s12,在部件与部件形成缝隙处以及部件表面含有的孔洞处建立虚拟边界;
11、s13,利用阵面推进方法生成部件表面网格边界层网格;
12、s14,利用delaynay方法,分区域生成计算域中部件表面边界层以外的区域中的网格单元:如果部件表面网格边界层网格以外的区域中含有虚拟边界,则以虚拟边界作为网格生成的双侧边界,将整个区域分为左右两侧两个区域并分别生成网格单元;
13、s15,对各区域网格单元进行运动类型标签赋值,包括以下类型:
14、静止区域,此区域内单元计算过程中保持静止不动,运动类型标签批量赋值为0;
15、刚体运动区域,此区域内单元将跟随某一部件进行刚体运动,运动类型标签为与部件编号一致;
16、局部变形区域:此区域内单元计算过程中可进行变形,运动类型标签批量赋值为-1;
17、s16,对每个虚拟边界记录其相邻区域的编号信息:第 i个虚拟边界的编号由双元数(zoneleft_i, zoneright_i)表示,分别代表该虚拟边界左右两侧所在网格区域的编号;
18、s17,对每个虚拟边界设置其对应的打开时间。
19、进一步的,步骤s14中,区域编号采用n×10+1的方式进行命名,n为正整数。
20、进一步的,s17所述的对每个虚拟边界设置其对应的打开时间,包括:
21、根据火箭级间分离的过程:
22、设置级间段分离体部件表面孔洞对应虚拟边界的打开时间为级间段排焰窗口打开时间;
23、设置级间段分离体部件与部件之间缝隙构成的虚拟边界的打开时间为火工品切割的时间;
24、设置火箭上面级部件、下面级部件与分离体部件之间的缝隙构成的虚拟边界的打开时间为自由分离的时间;
25、对每个虚拟边界上的打开时间进行排序,记录最后一个虚拟边界的打开时间,记为。
26、进一步的,确定当前计算时间步上虚拟边界上的通量,包括:
27、用逻辑变量记录是否需要改变虚拟边界的开启状态,如果当前计算步物理时间大于最后一个虚拟边界的打开时间,则无需更新虚拟边界开启状态,为假;否则执行以下流程:
28、用变量记录下一个虚拟边界的预判打开时间在上一个时间步计算的结果,用变量记录下一个虚拟边界的预判打开时间,按编号顺序遍历每个编号为 i的虚拟边界的打开时间:
29、如果小于当前计算步物理时间,则无需再考虑编号为 i的虚拟边界,编号 i的值加1,遍历下一个虚拟边界的打开时间;否则执行判断:如果小于下一个虚拟边界的预判打开时间,则将预判下一个虚拟边界的打开时间重新赋值为;
30、将下一个虚拟边界的预判的打开时间和在上一个时间步计算的结果进行比较,如果两者相等,则无需重新改变某个虚拟边界的开启状态,为假;如果两者不相等,则需要重新设置虚拟边界上的开启状态,为真;
31、计算计算域中所有单元面上的通量,如果某个单元面在虚拟边界上同时为开启状态,则该单元面按内部单元面处理,否则按照边界单元面处理。
32、进一步的,当为真,重新设置虚拟边界上的开启状态,方法如下:
33、按编号顺序遍历每个编号为 i的虚拟边界的打开时间:如果小于当前计算步时间,则继续遍历编号为 i的虚拟边界左右两侧所在的区域编号(zoneleft_i,zoneright_i);否则进入下一步循环,编号 i的值加1;
34、遍历计算域中所有单元面:考虑遍历编号为 j的单元左右两侧所在的区域编号(zoneleft_j, zoneright_j),为减少左右两侧重复的逻辑判断,仅判断zoneleft_i×zoneright_i 与zoneleft_j× zoneright_j是否相等,如果相等,则编号为 j的单元设置为开启状态。
35、进一步的,根据各部件下一时间步的质心平移位置和绕其主惯性轴的转动确定计算域中各类运动类型区域内网格单元的节点位置,包括:
36、对于静止类型区域内网格单元,其节点位置和上一时间步保持不变;
37、对于跟随第 i个部件进行刚体运动的区域,其节点坐标满足以下方程:
38、
39、其中,为第 i个部件的质心,为第 i个部件绕三个主惯性轴的转动角速度;
40、对于局部变形区域,采用顶点弹簧模型实现网格变形运动,对于顶点弹簧,网格点所受的合力表示为:
41、
42、其中,为连结节点 i、 j的弹簧的倔强系数,是节点的位置矢量,为计算域内单元节点的总个数,是与节点相连的节点数;对于所有节点,上式表示为线性系统,假设内部节点初始受力为零,则节点受力情况表示为如下系统:
43、
44、其中代表第 i行第 k列的矩阵系数,计算方法如下:
45、。
46、进一步的,倔强系数的计算方法如下:
47、
48、其中代表节点 i和节点 j的距离,为边界加强因子,表示扭转效应,为常值。
49、进一步的,边界加强因子的计算方法如下:
50、
51、其中,为节点 i和节点 j相连单元边中心距离各个固壁边界的最短距离,为人工经验距离参数,取为2倍的部件表面网格单元的平均尺寸。
52、进一步的,扭转效应的计算方法如下:
53、
54、其中,表示连接节点 i和节点 j的单元边所属的所有三角单元的个数,为连接节点 i和节点 j的单元边所属的所有三角单元中第 m个三角单元的最小内角。
55、本发明与现有技术相比的有益效果是:
56、(1)本发明由于采用网格运动变形单元分类,实现了一种批量式的、可自定义的动网格单元类型标记方法,在满足仿真精度的前提下,将需要进行网格变形的单元的区域局限到有限的范围内,减小了网格变形处理过程的计算开销,将火箭级间分离大范围部件机动过程仿真中需要进行网格变形的区域减少到工程应用能够接受的范围。
57、(2)本发明由于采用虚拟边界类型切换方法,实现了一种适用于火箭级间分离部件间缝隙和部件自身孔洞处边界类型的自动化的切换方法,在无需重新定义网格边界类型和不显著增加网格边界类型处理计算量的条件下,更为高效的对火箭级间分离过程复杂时序进行建模,能够减小仿真设计人员的人在参与依赖。
58、(3)本发明由于采用基于壁面距离二次光滑函数的边界效应修正和基于三角形单元内角的扭转修正,实现了对边界附近弹簧模型系数更为鲁棒的加强方法,能够有效适应火箭级间分离大范围部件机动过程的复杂网格变形过程,提高仿真鲁棒性。
- 还没有人留言评论。精彩留言会获得点赞!