一种水刀的偏转程度识别方法及系统与流程
本技术涉及能够高效准确判断水刀偏转程度的方法及系统。
背景技术:
1、在水刀工作过程中,需要确保水刀在腔道内的准确位姿,具体地说,在准确的位姿下,也就是水刀未发生偏转的情形,水刀及水刀所喷射的水射流图像才可完整地显示在超声图像上,这对于水刀手术是必要的,准确位姿可以保证工作过程中给手术操作者提供完整准确的信息并精准实施手术。但是,如果通常在布置水刀的过程中存在不可避免的偏转,如果水刀实际所在的面相对于超声图像、例如矢状面超声图像的成像平面存在偏转,则水刀无法完整地显示在该矢状面超声图像上,进而水刀所喷射的水射流也偏离了该矢状面超声图像,导致操作者无法在超声图像上获得水刀及水射流的水柱的清晰、准确的信息,从而妨碍手术的进行。
2、因此,在水刀实际所在的面相对于超声图像、例如矢状面超声图像的成像平面存在偏转的情况下,需要获取偏转信息,例如偏转的方向或角度、偏转的距离等与偏转程度有关的信息,并提示给操作者或提供给手术系统的控制单元,以使手术前能够准确地进行水刀位姿的调整。
3、传统的方法通过控制水刀喷水等方式,反复多次调整水刀的位姿包括水刀刀头的方向,这个过程需要人工借助超声图像观察偏转程度并根据经验判断应如何调整水刀位姿使其能够消除偏转,直到水刀刀头达到需要的初始位姿,过程耗时较长且反复多次的操作易对周围组织造成伤害,这是不希望的;此外,也存在自动化程度低且完全依赖于操作者经验的问题。
4、水刀的偏转程度也可以通过光学或磁导航等外加装置或识别标识的方式,但外加标识点或识别传感器都需增加额外的装置,如光学导航要在水刀外部空间安装,且相机和标识点光路之间不能有遮挡,磁导航须在进入人体腔道内的水刀上增加额外的传感器且易受外部磁场干扰,人体外如病床上需增加磁场接收传感器,以上会对操作者的操作空间等有影响,特别如体外操作空间较小的手术场景。
5、水刀的偏转程度还可以在实时超声图像中获得,但实时三维超声设备昂贵,实时二维超声图像需要操作者在矢状面及横断面两组图像中进行反复切换观察,通过肉眼识别、空间想象和经验来预设最终的轨迹,仍然存在过程耗时较长、准确度相对较低,且频繁移动超声探头会对腔道组织带来损伤等技术问题。
6、因此,现有技术中,存在如何无需额外装置即可高效、准确地对水刀偏转程度进行识别的技术课题。
技术实现思路
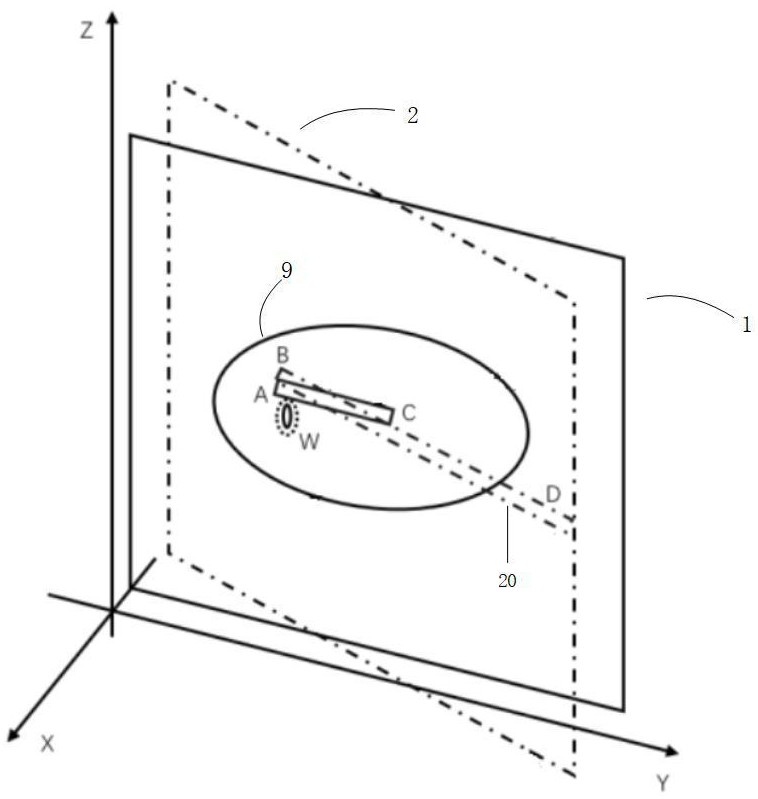
1、为了实现上述目的,本技术的一个方案为,一种水刀的偏转程度识别方法,所述水刀具备能够喷射射流的刀孔,包含如下步骤:s1:图像模板预设步骤,将所述水刀在超声图像中对应的矢状面与其实际所在的面所成的角度作为偏转角度,将所述水刀实际所在的面相对于其在超声图像中对应的矢状面的偏转角度所导致的、所述射流相对于所述矢状面的距离作为偏移距离;预先获取多个偏转角度下所述水刀在所述矢状面上对应的预设水刀图像,形成预设水刀图像模板集合;及/或,预先获取多个偏移距离下所述射流在所述矢状面上对应的预设射流图像,形成预设射流图像模板集合,其中以所述射流的中心线到所述矢状面的垂直距离为所述偏移距离;
2、s2:图像匹配步骤,获取所述水刀在所述矢状面上对应的实际水刀图像,将所述实际水刀图像与所述预设水刀图像模板集合中的图像模板进行匹配,及/或,获取所述射流在所述矢状面上对应的实际射流图像,将所述实际射流图像与所述预设射流图像模板集合中的图像模板进行匹配;
3、当匹配结果满足预设的第一条件时,判定为所述水刀的偏转程度可接受而无需对水刀的位姿进行调整;当匹配结果不满足预设的第一条件时,判定为所述水刀的偏转程度不可接受而需要对水刀的位姿进行调整。
4、根据前述的技术方案,通过图像匹配来初步判断水刀是否存在偏转,以及偏转程度是否可接受,以提高判断的准确度和调整效率。
5、在一个优选的方式中,基于所述实际水刀图像与所述预设水刀图像模板集合的匹配结果获取所述水刀的粗略偏转角度,及/或,基于所述实际射流图像与所述预设射流图像模板集合的匹配结果,获取所述射流的粗略偏移距离;
6、所述第一条件为,所述粗略偏转角度小于预设的第一偏转角度阈值,及/或,所述粗略偏移距离小于预设的第一偏移距离阈值。
7、根据本发明,在粗略偏转角度和粗略偏移距离同时满足条件的情况下判定为水刀位姿不需要调整,能够有效地避免误操作。
8、在一个优选的方式中,当匹配结果不满足所述第一条件时,进入偏转角度计算步骤:
9、在匹配结果满足预设的第二条件的情况下,基于所述粗略偏转角度及/或所述粗略偏移距离,获取所述水刀的偏转角度。
10、在一个优选的方式中,在匹配结果不满足所述第二条件的情况下,获取与所述矢状面垂直的至少一个横断面的超声图像,至少基于该至少一个横断面的超声图像中所述水刀的成像点的位置,确定所述水刀的偏转角度。
11、根据前述的技术方案,通过水刀的粗略偏转角度及射流的粗略偏移距离就足以精确地判定水刀的偏转角度的情况下,仅通过矢状面图像就能够计算水刀的偏转角度。通过水刀的粗略偏转角度及射流的粗略偏移距离不足以精确地判定水刀的偏转角度的情况下,引入横断面图像来计算水刀的偏转角度。
12、在一个优选的方式中,所述第二条件为,所述粗略偏转角度小于预设的第二偏转角度阈值,及/或所述粗略偏移距离小于预设的第二偏移距离阈值;或者,所述第二条件为,将所述粗略偏转角度和所述粗略偏移距离进行加权而得到的所述水刀的偏转程度小于预设的偏转程度阈值。
13、在一个优选的方式中,在所述偏转角度计算步骤中,预先建立所述预设水刀图像模板集合、所述预设射流图像模板集合之间的映射关系;
14、在匹配结果满足预设的第二条件的情况下时,判断所述实际水刀图像、所述实际射流图像是否符合所述映射关系;如符合则判定为所述粗略偏转角度为高可信度,否则判定为所述粗略偏转角度为低可信度。
15、根据本发明,在偏转角度的判断为高可信度的情况下,能够减少水刀的调整次数,减轻患者的负担。在偏转角度的判断为低可信度的情况下,能够分步逼近正确的水刀位姿,确保调整的准确度。
16、在一个优选的方式中,在所述偏转角度计算步骤中,在匹配结果不满足所述第二条件的情况下,
17、若匹配结果满足预设的第三条件,则获取间隔设置的第一横断面、第二横断面的超声图像,所述水刀在所述第一横断面、所述第二横断面对应的超声图像中分别呈现为第一成像点、第二成像点;基于所述第一成像点、所述第二成像点的位置,确定所述水刀在物理空间坐标系中对应的直线方程;
18、若匹配结果不满足所述第三条件,则仅获取一个横断面的超声图像,基于所述水刀在该横断面对应的超声图像中的成像点的位置和所述刀孔在所述矢状面图像中的成像点的位置,确定所述水刀在物理空间坐标系中对应的直线方程;
19、所述第三条件为:所述粗略偏转角度大于预设的第三偏转角度阈值,及/或,所述粗略偏移距离大于预设的第三偏移距离阈值。
20、根据前述的技术方案,当偏转角度比较大时,引入两个横断面能够使角度判断更加准确。
21、在一个优选的方式中,在所述偏转角度计算步骤中,在匹配结果不满足所述第二条件且满足所述第三条件时,选择所述矢状面图像中所述刀孔对应的位置获取横断面图像,作为所述第一横断面的图像。
22、在一个优选的方式中,基于超声图像坐标系与物理空间坐标系的标定关系,分别获取所述第一成像点、所述第二成像点在超声图像坐标系中的第一像素坐标、第二像素坐标,再将所述第一像素坐标、所述第二像素坐标像素坐标转换为物理空间坐标系中的第一空间坐标、第二空间坐标。
23、在一个优选的方式中,在所述偏转角度计算步骤中,当所述粗略偏转角度大于/等于预设的偏转角度阈值,且所述粗略偏移距离小于/等于预设的偏移距离阈值时:仅在超声图像中设置一个横断面,基于所述水刀在该横断面上的成像点的位置和所述刀孔在所述矢状面上的成像点的位置,确定所述水刀在物理空间坐标系中对应的直线方程。
24、根据前述的技术方案,当偏转角度相对没那么大时,引入一个横断面能够在准确判断偏转角度的同时,减少超声探头的移动次数和距离,减轻对腔道组织的损伤。
25、在一个优选的方式中,设安全精度为m,所述预设水刀图像模板集合中对应的最大偏转角度为θ0,则在超声图像坐标系中,所述第二横断面与所述第一横断面之间的间距为m*tanθ0。
26、在一个优选的方式中,至少基于超声图像采集和图像识别过程中的误差,设计算精度为n,安全系数为p,所述安全精度m=n*p。
27、此外,本技术的另一方面是,一种水刀的偏转程度识别系统,其特征在于:包含图像采集模块、图像模板匹配模块和水刀偏转程度计算模块;所述图像采集模块用于采集所述水刀及其射流的超声图像;所述图像模板匹配模块将所述图像采集模块采集的所述水刀及其射流的超声图像,与预设水刀图像模板集合、预设射流图像模板集合进行匹配;所述水刀偏转程度计算模块按照前述的水刀的偏转程度识别方法,确定所述水刀的实际偏转程度。
- 还没有人留言评论。精彩留言会获得点赞!