一种基于全身动作捕捉的潜水作业仿真系统及方法与流程
本发明涉及潜水作业仿真领域,特别是关于一种基于全身动作捕捉的潜水作业仿真系统及方法。
背景技术:
1、受通航区航路上船舶安全作业需要,通航区内水下油气生产设施需安装在泥面下的钢制防护结构圆筒内。水下设施的前期安装、后期运维均需潜水员进入钢圆筒内部施工。
2、但是钢圆筒内为受限空间,且设备密集、空间狭小,加之渤海水下能见度低,潜水员水下施工作业空间受限,面临脐带缆缠绕等风险,存在较大安全风险。利用仿真模拟系统进行受限空间内的潜水员施工演练不但能够验证设计方案可靠性,还可以有效降低施工风险,提高作业效率。
3、然而,现有技术中并没有能够利用仿真模拟系统进行受限空间内的潜水员施工演练进而能够有效降低施工风险、提高作业效率的方法或系统。
技术实现思路
1、针对上述问题,本发明的目的是提供一种基于全身动作捕捉的潜水作业仿真系统及方法,能够有效降低施工风险,提高作业效率。
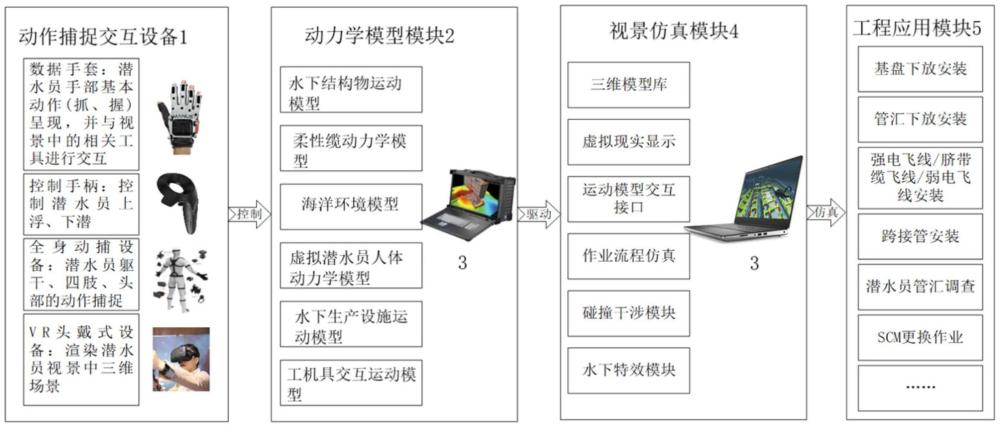
2、为实现上述目的,本发明采取以下技术方案:一方面,提供一种基于全身动作捕捉的潜水作业仿真系统,包括动作捕捉交互设备、动力学模型模块、图形工作站、视景仿真模块和工程应用模块,其中,所述动作捕捉交互设备包括控制手柄、人体动捕穿戴设备、数据手套、无线接收器、vr头戴式设备和空间定位传感器;
3、所述控制手柄用于控制虚拟潜水员的上浮和下潜;
4、所述人体动捕穿戴设备和数据手套分别佩戴在受训潜水员身上,所述人体动捕穿戴设备和数据手套用于捕捉受训潜水员躯干、四肢、头部和手部的动作,得到人体关节运动姿态数据,并通过所述无线接收器发送至所述图形工作站;
5、所述vr头戴式设备用于渲染虚拟潜水员视景中的三维场景,并将所述vr头戴式设备的运动信息位置、角度和加速度信息通过所述无线接收器实时传输至所述图形工作站3;
6、所述空间定位传感器用于定位所述人体动捕穿戴设备的运动信息,并通过所述无线接收器传输至所述图形工作站;
7、所述动力学模型模块用于构建动力学模型;
8、所述图形工作站用于基于人体关节运动姿态数据,创建虚拟潜水员,并根据人体关节运动姿态数据,所述动力学模型模块建立的模型,所述vr头戴式设备的运动信息位置、角度和加速度信息以及所述人体动捕穿戴设备的运动信息,得到三维场景画面,实现受训潜水员与三维场景画面中虚拟潜水员的动作一致;
9、所述工程应用模块用于提供不同的水下作业场景;
10、所述视景仿真模块用于基于不同的水下作业场景,将三维场景画面输出到所述vr头戴式设备中进行显示。
11、进一步地,所述人体动捕穿戴设备包括两个手部追踪器、两个手臂追踪器、一个腰部追踪器、两个腿部追踪器和两个脚部追踪器,各追踪器分别设置在受训潜水员的对应位置,用于捕捉受训潜水员对应位置处的动作。
12、进一步地,每一所述追踪器均包括追踪器基站和追踪器发射端,所述追踪器基站通过usb线缆连接所述图形工作站,所述追踪器发射端佩戴在受训潜水员的身体各部位;在运行过程中,所述追踪器基站接收所述追踪器发射端发送的信号,并将其输入至所述图形工作站中。
13、进一步地,所述图形工作站连接usb扩展坞,用于为所述追踪器提供足够的usb插槽。
14、进一步地,所述图形工作站采用两个usb扩展坞为所述追踪器提供usb插槽,其中一所述usb扩展坞为带外接电源的七口扩展坞,使用usb线连接所述图形工作站;另一所述usb扩展坞以tpyec接口连接所述图形工作站。
15、进一步地,所述vr头戴式设备采用vr头盔,所述vr头盔与串流盒连接,所述串流盒将所述vr头盔与所述图形工作站连接,使得所述vr头盔的运动信息位置、角度和加速度信息实时传输至所述图形工作站,所述图形工作站的计算结果通过所述串流盒反馈至所述vr头盔。
16、进一步地,所述动力学模型模块包括:
17、水下结构物运动仿真模块,用于模拟和预测水下结构物在不同环境下的运动行为,构建水下结构物运动模型;
18、柔性缆动力学模型仿真模块,用于仿真柔性缆的脐带缆内的气体供应管、气体回收管、热水管、电力供应缆和信号缆,对柔性缆在动态环境中的行为进行模拟和分析,模拟柔性缆在各种外力作用下的运动状态和受力情况,判断柔性缆是否对潜水员产生威胁,构建柔性缆动力学模型;
19、海洋环境仿真模块,用于对海洋环境进行渲染以及对水下可见度进行仿真,构建海洋环境模型;
20、虚拟潜水员人体动力学建模模块,用于对钢圆筒内恶劣环境下的潜水员仿真作业场景,构建虚拟潜水员人体动力学模型;
21、水下生产设施运动仿真模块,用于进行水下生产设施碰撞干涉和物理约束检测,通过实时监测和计算各水下生产设施的位置、速度和加速度,以及通过建立和更新水下生产设施之间的碰撞干涉矩阵,构建水下生产设施运动模型。
22、进一步地,所述视景仿真模块包括:
23、运动模型交互接口,用于响应获取所述动力学模型模块的数据;
24、三维模型库模块,用于显示预先构建的水下三维场景三维模型、虚拟潜水员三维模型和作业工机具三维模型;
25、虚拟现实显示模块,用于将所述三维模型库模块的模型输出到所述vr头戴式设备中;
26、作业流程仿真模块,用于模拟不借助所述动力学模型模块驱动且在特定条件触发的水下生产设施运动;
27、碰撞干涉模块,用于检测虚拟潜水员是否与周围环境发生碰撞干涉;
28、水下特效模块,用于基于所述工程应用模块提供不同的水下作业场景,显示水下效果。
29、进一步地,所述虚拟潜水员人体动力学建模包括人体躯干及四肢动力学建模和手部动力学建模;
30、人体躯干及四肢动力学建模方法为:
31、采用3dsmax三维动画渲染和制作方法,对虚拟潜水员虚拟人物进行三维模型;虚拟潜水员人体动力学模型解算人体颈关节、肩关节、肘关节、腰关节、髋关节、膝关节、腕关节、踝关节运动数据,在所述视景仿真模块的运动模型交互接口将上述数据与虚拟潜水员的三维模型进行绑定;
32、手部动力学建模方法为:
33、采用3dsmax三维动画渲染和制作方法,对人手进行虚拟建模,并去除0自由度的腕掌关节,合并拇指的掌指关节和拇指腕掌关节,在关节处加入关节球,实现关节的局部控制,进而将虚拟手模型转化为由多个关节模型构成的运动手模型组合。
34、另一方面,提供一种基于全身动作捕捉的潜水作业仿真方法,包括:
35、将人体动捕穿戴设备、数据手套和vr头戴式设备分别佩戴在受训潜水员身上;
36、通过人体动捕穿戴设备捕捉受训潜水员躯干、四肢、头部的动作,通过数据手套捕捉受训潜水员手部的动作,得到人体关节运动姿态数据,并通过无线接收器发送至图形工作站;
37、图形工作站将人体关节运动姿态数据转化为数字人物的运动数据,创建数字人物即虚拟潜水员;
38、通过vr头戴式设备渲染虚拟潜水员视景中的三维场景,并将vr头戴式设备的运动信息位置、角度和加速度信息通过无线接收器实时传输至图形工作站;
39、通过控制手柄控制虚拟潜水员的上浮和下潜;
40、通过空间定位传感器定位人体动捕穿戴设备的运动信息,并通过无线接收器传输至图形工作站;
41、图形工作站根据人体关节运动姿态数据,动力学模型模块预先建立的模型,vr头戴式设备的运动信息位置、角度和加速度信息以及人体动捕穿戴设备的运动信息,得到用于受训潜水员看到的三维场景画面,并实现受训潜水员与三维场景画面中虚拟潜水员的动作一致;
42、视景仿真模块基于工程应用模块提供不同的水下作业场景,将三维场景画面输出到vr头戴式设备中进行显示,提供沉浸式仿真交互,以及检测虚拟潜水员是否与周围环境发生碰撞干涉。
43、本发明由于采取以上技术方案,其具有以下优点:
44、1、本发明中,受训潜水员在受限空间内使用vr头戴式设备与水下生产设施交互仿真,解决潜水员运动与虚拟现实交互仿真作业技术难题。
45、2、本发明通过构建水下三维场景三维模型、虚拟潜水员三维模型和作业工机具三维模型以及进行碰撞干涉,能够深度还原潜水员水下作业场景,为受训潜水员提供真实的作业环境。
46、3、本发明建立虚拟潜水员人体动力学模型,开发运动模型交互接口,采用多组追踪器控制虚拟环境中人体运动,真实模拟安装、维修作业,为潜水员水下作业培训提供可行方案。
47、4、本发明的视景仿真模块包括通用化脚本模块,未来可用于其他海域潜水作业培训。
48、5、本发明通过视景仿真模块可以实现虚拟潜水员水下作业视景的立体显示、多通道三维漫游以及动作捕捉交互设备和虚拟场景人机交互功能。
49、6、本发明基于追踪器采集人体姿态,研究了人体姿态解算算法和人体姿态映射关系,实现了由人体姿态信息到虚拟潜水员驱动信号的数据转换,最终完成受训潜水员佩戴动作捕捉交互设备对虚拟潜水员的控制,并通过仿真科目操作验证了本发明的虚拟潜水员运动整体性能。
50、7、本发明实现了手部运动控制、手部抓取等交互方法,系统通过水下作业仿真科目验证了该系统交互方式的有效性。
51、8、本发明基于动力学原理,建立柔性缆动力学模型,通过数值方法对脐带缆的动力学方程进行求解,并根据缆绳的物理特性(扭转阻尼、拉伸阻尼、弯折阻尼、浮力)实现柔性缆运动状态实时模拟。
52、综上所述,本发明可以广泛应用于潜水作业仿真领域中。
- 还没有人留言评论。精彩留言会获得点赞!