一种无人机方向实时估计方法及系统
本发明涉及信号处理的,特别涉及一种无人机方向实时估计方法及系统。
背景技术:
1、随着无人机技术与产业的逐渐完善,无人机开始助力社会生活的各个方面,但也有不法分子使用无人机进行非法行为,比如使用无人机进行跟拍偷拍、操作无人机进入机密区域、无人机袭击等,因此如何快速识别无人机并对其方向进行估计,对防治无人机袭击具有重要意义。
2、无人机在飞行途中会向外发射或辐射信号,通过阵列天线接收无人机信号后并估计出信号的来波方向(doa,direction of arrival)就可以得到无人机的方向。doa估计是阵列信号处理领域的重要研究课题,其中以基于子空间的doa估计方法最为先进和成熟,其中最具有代表意义的是schmidt r o等人提出的多重信号分类算法(music),该算法主要思路是依据矩阵的谱分解理论将阵列接收数据的协方差矩阵划分为信号子空间和与之正交的噪声子空间,信号的角度估计值由对利用这两个子空间相互正交的特性建立的谱函数的峰值求解得到。要估计无人机方向,需要得到无人机信号doa的俯仰角和方位角,其中俯仰角为无人机所在方向与xy平面的夹角,方位角为无人机所在方向在xy平面的投影与x轴的夹角。music算法的提出基于一维阵列,无法进行二维的doa(俯仰角和方位角)估计,因此现有技术中使用基于“l”形阵列的二维music算法来进行二维doa估计,但存在以下缺点:现有技术二维music算法的数据为复数数据,复数数据单次乘法涉及4次乘法运算,运算量大;现有技术通过特征值分解提取噪声子空间,而特征值分解运算复杂度高、计算开支远大于一般矩阵运算;现有技术通过二维搜索来获取无人机方向(方位角和俯仰角)的估计值,估计精度与搜索步长挂钩,搜索步长越小精度越高,但搜索步长越小则搜索过程的循环次数越大,将导致更高的运算复杂度,并且由于搜索维度是二维,随着步长缩小,运算复杂度呈幂次增长;另外,现有技术的运用前提是无人机的数量是已知的或被正确估计的,面对未知的无人机的数量,难以准确实时估计。
技术实现思路
1、为解决上述现有技术存在运算复杂度高,算法运行时间长,方向估计存在时延,难以实现实时地方向估计的问题,本发明提出一种无人机方向实时估计方法及系统,降低运算复杂度,减少算法运行时间长,降低方向估计时延,实现实时地方向估计。
2、为了达到上述技术效果,本发明的技术方案如下:
3、一种无人机方向实时估计方法,所述方法包括以下步骤:
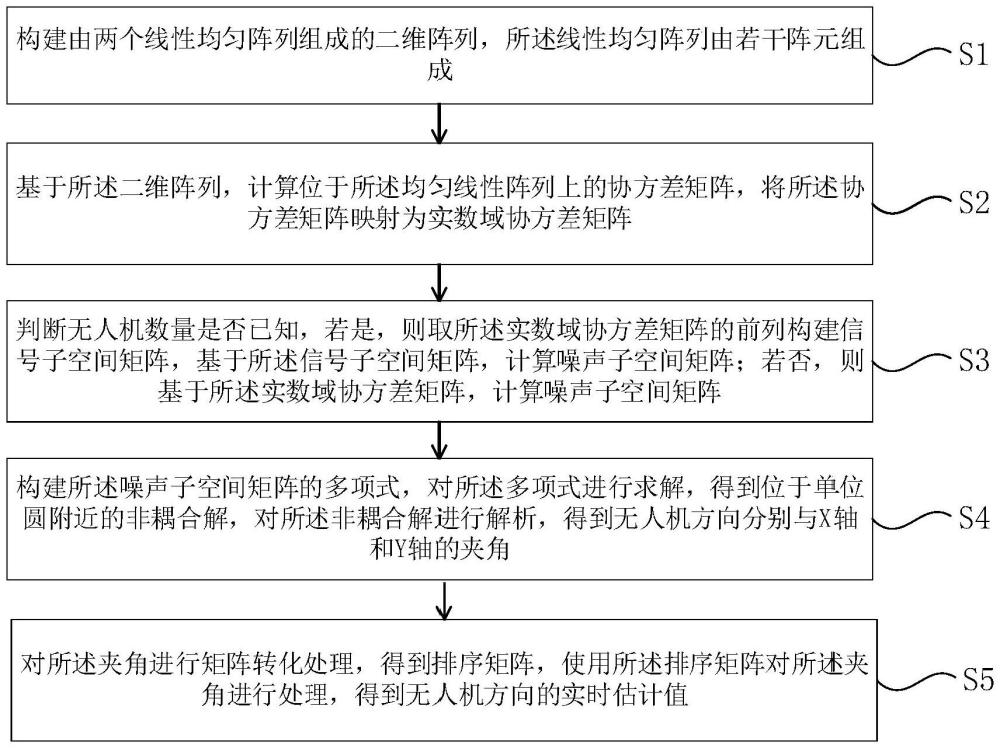
4、s1.构建由两个线性均匀阵列组成的二维阵列,所述线性均匀阵列由若干阵元组成;
5、s2.基于所述二维阵列,计算位于所述均匀线性阵列上的协方差矩阵,将所述协方差矩阵映射为实数域协方差矩阵;
6、s3.判断无人机数量是否已知,若是,则取所述实数域协方差矩阵的前k列构建信号子空间矩阵,基于所述信号子空间矩阵,计算噪声子空间矩阵;若否,则基于所述实数域协方差矩阵,计算噪声子空间矩阵;
7、s4.构建所述噪声子空间矩阵的多项式,对所述多项式进行求解,得到位于单位圆附近的非耦合解,对所述非耦合解进行解析,得到无人机方向分别与x轴和y轴的夹角;
8、s5.对所述夹角进行矩阵转化处理,得到排序矩阵,使用所述排序矩阵对所述夹角进行处理,得到无人机方向的实时估计值。
9、优选地,s1所述二维阵列包括沿x轴正方向均匀线性阵列和沿y轴正方向均匀线性阵列,所述沿x轴正方向均匀线性阵列以原点为起点每间隔d放置一个阵元,共放置m+1个阵元;所述沿y轴正方向均匀线性阵列以原点为起点每间隔d放置一个阵元,共放置m+1个阵元,所述沿x轴正方向均匀线性阵列和沿y轴正方向均匀线性阵列共用原点处的阵元。
10、优选地,计算位于所述沿x轴正方向均匀线性阵列上的协方差矩阵的表达式如下:
11、
12、其中,rx表示沿x轴正方向均匀线性阵列上的协方差矩阵,表示rx的近似协方差,表示沿x轴正方向均匀线性阵列的输出快拍数据矩阵,表示复数集,(m+1)×t表示维度,t表示时间点,x(tt)表示在时间点t读取沿x轴正方向均匀线性阵列x(t)的输出向量,(·)h表示矩阵共轭转置,(·)*表示矩阵共轭,(·)t表示矩阵转置,j表示交换矩阵;
13、计算位于所述沿y轴正方向均匀线性阵列上的协方差矩阵的表达式如下:
14、
15、其中,ry表示沿y轴正方向均匀线性阵列上的协方差矩阵,表示ry的近似协方差,表示沿y轴正方向均匀线性阵列的输出快拍数据矩阵,y(tt)表示在时间点t读取沿y轴正方向均匀线性阵列y(t)的输出向量。
16、优选地,s2所述将所述协方差矩阵映射为实数域协方差矩阵,包括:
17、s21.定义酉矩阵如下表达式:
18、
19、其中,表示虚数单位,i表示单位矩阵,
20、s22.利用所述酉矩阵qm将所述协方差矩阵映射为实数域协方差矩阵如下:
21、
22、其中,表示沿x轴正方向均匀线性阵列的实数域协方差矩阵,沿y轴正方向均匀线性阵列的实数域协方差矩阵,表示实数集。
23、优选地,s3所述基于所述信号子空间矩阵,计算噪声子空间矩阵的表达式如下:
24、
25、其中,ex表示取的前k列构建的信号子空间矩阵,ey表示取的前k列构建的信号子空间矩阵,ux表示沿x轴正方向均匀线性阵列的噪声子空间矩阵,uy表示沿y轴正方向均匀线性阵列的噪声子空间矩阵。
26、优选地,s3所述基于所述实数域协方差矩阵,计算噪声子空间矩阵的表达式如下:
27、
28、其中,ux表示沿x轴正方向均匀线性阵列的噪声子空间矩阵,uy表示沿y轴正方向均匀线性阵列的噪声子空间矩阵,μ表示极小值。
29、优选地,s4具体包括:
30、s41.定义所述沿x轴正方向均匀线性阵列的噪声子空间矩阵ux的多项式为fx(u),沿y轴正方向均匀线性阵列的噪声子空间矩阵uy的多项式为fy(v),fx(u)和fy(v)的计算表达式分别如下:
31、
32、其中,ui和vi表示复数变量,pi和qi表示多项式系数;
33、s42.对pi和qi分别计算如下:
34、
35、其中,diag(,)表示对角矩阵,sum(.)表示求和函数;
36、s43.对多项式fx(u)=0和fy(v)=0进行求解,得到位于单位圆附近的非耦合解表示非耦合解的个数;
37、s44.对所述非耦合解进行解析,得到无人机方向分别与x轴和y轴的夹角如下:
38、
39、其中,表示无人机方向和x轴的夹角,表示无人机方向和y轴的夹角,arccos表示反余弦函数,arg表示复数幅角,λ表示波长,π表示圆周率,d表示均匀线性阵列的阵元间距。
40、优选地,s5所述对所述夹角进行矩阵转化处理,得到排序矩阵,包括:
41、s501.利用所述无人机方向和x轴的夹角构造第一导向矩阵表示第一导向矩阵的列向量;并利用所述无人机方向和y轴的夹角构造第二导向矩阵表示第二导向矩阵的列向量;
42、s502.基于所述第一导向矩阵和第二导向矩阵计算沿x轴正方向均匀线性阵列x(t)和沿y轴正方向均匀线性阵列y(t)的互协方差矩阵如下:
43、
44、其中,rs表示信号协方差矩阵,表示信号协方差矩阵的估计值;
45、s503.基于所述互协方差矩阵构建最小化问题如下:
46、
47、s504.对所述最小化问题求解,得到最优矩阵表示矩阵伪逆;
48、s505.将所述最优矩阵转化为排序矩阵g(·)表示转化函数。
49、优选地,所述使用所述排序矩阵对所述夹角进行处理,得到无人机方向的实时估计值,包括:
50、s511.利用所述排序矩阵对所述无人机方向和y轴的夹角进行排序如下:
51、
52、其中,表示排序后的无人机方向和y轴的夹角;
53、s512.基于排序后的无人机方向和y轴的夹角和无人机方向和x轴的夹角组成无人机夹角对
54、s513.基于所述无人机夹角对计算无人机方向的实时估计值,所述无人机方向的实时估计值包括方位角估计值和俯仰角估计值所述方位角估计值的计算表达式如下:
55、
56、所述俯仰角估计值的计算表达式如下:
57、
58、本发明提出了一种无人机方向实时估计系统,所述系统包括:
59、构建模块,用于构建由两个线性均匀阵列组成的二维阵列,所述线性均匀阵列由若干阵元组成;
60、映射模块,用于根据所述二维阵列,计算位于所述均匀线性阵列上的协方差矩阵,将所述协方差矩阵映射为实数域协方差矩阵;
61、噪声子空间矩阵计算模块,用于判断无人机数量是否已知,若是,则取所述实数域协方差矩阵的前k列构建信号子空间矩阵,基于所述信号子空间矩阵,计算噪声子空间矩阵;若否,则基于所述实数域协方差矩阵,计算噪声子空间矩阵;
62、多项式求解模块,用于构建所述噪声子空间矩阵的多项式,对所述多项式进行求解,得到位于单位圆附近的非耦合解,对所述非耦合解进行解析,得到无人机方向分别与x轴和y轴的夹角;
63、方向估计模块,用于对所述夹角进行矩阵转化处理,得到排序矩阵,使用所述排序矩阵对所述夹角进行处理,得到无人机方向的实时估计值。与现有技术相比,本发明技术方案的有益效果是:
64、本发明提出一种无人机方向实时估计方法及系统,首先通过构建二维阵列并映射均匀线性阵列上的协方差矩阵至实数域,显著降低了运算复杂度;其次采用矩阵运算替代特征值分解计算噪声子空间,减少了噪声子空间的计算开支,通过判断无人机数量是否已知来切换噪声子空间矩阵的计算方式,所有方式都无需进行特征值分解;然后,将位于xy平面的二维阵列与含有方位角、俯仰角的二维信号模型,转化为两个一维信号模型,每个模型只有一个角度变量,分别是无人机方向与x轴的夹角和无人机方向与y轴的夹角;并且不使用遍历搜索方式,而是通过构造多项式求解实现角度估计的解耦,直接得到角度的解析解,该过程与遍历搜索过程相比,无需在精度与复杂度之间取舍,可在保持精度不变的前提下大大缩减复杂度和方向估计时延;进一步,在计算噪声子空间时,判断无人机数量k是否已知来切换不同的噪声子空间的计算方式,本发明无需无人机数量k参数,能在复杂的无人机入侵场景中正确进行方向估计。
- 还没有人留言评论。精彩留言会获得点赞!