一种多区域的地图构建方法及装置与流程
本技术涉及园林工具领域,尤其涉及一种多区域的地图构建方法及装置。
背景技术:
1、当前对于多个工作区域的地图构建,有的采用在每个工作区域放置一个移动机器人,移动机器人各自采集所在工作区域的区域地图。此方式需要每个工作区域都设置一个移动机器人,成本较高。有的采用一个移动机器人实现对多个工作区域的地图构建,用户需等待移动机器人在一个工作区域建图完成后,遥控移动机器人前往下一个工作区域进行建图,直至所有工作区域的建图完成。如此,会导致用户的等待时间过长,对用户不友好。
技术实现思路
1、本技术公开了一种多区域的地图构建方法及装置,能够节省多区域的地图构建过程中用户的等待时长,对用户友好。
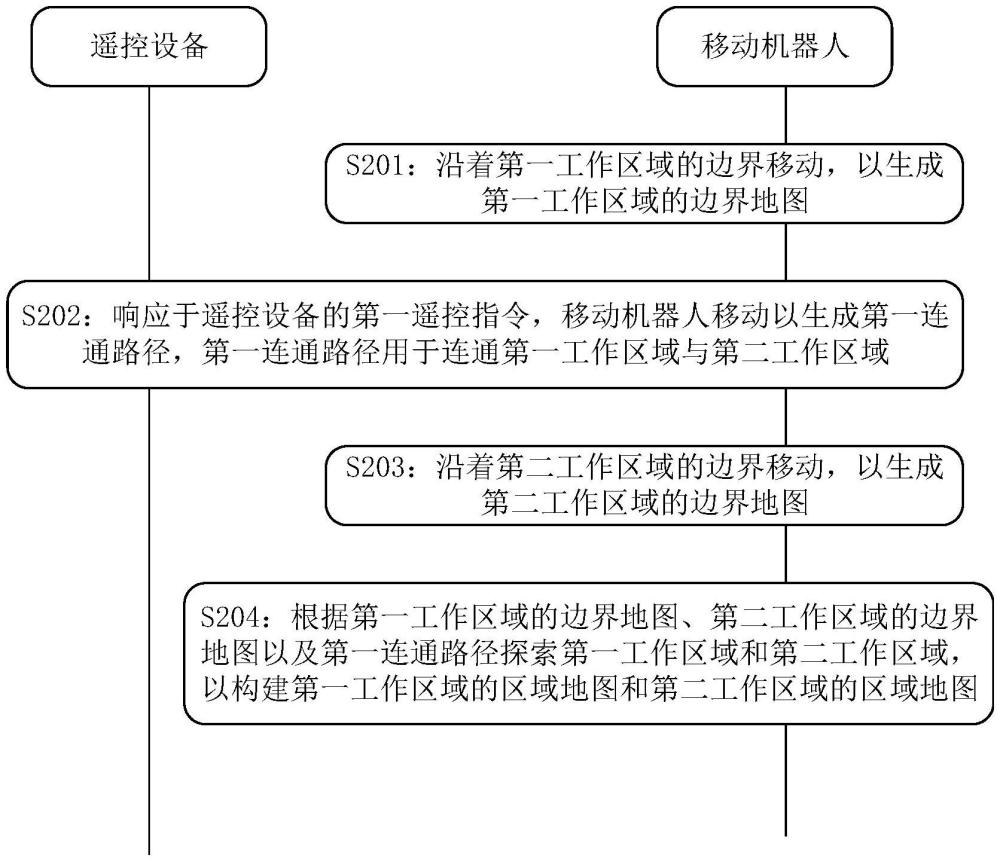
2、第一方面,本技术提供了一种多区域的地图构建方法,所述方法应用于移动机器人,所述多区域包括第一工作区域和第二工作区域,所述方法包括:沿着所述第一工作区域的边界移动,以生成所述第一工作区域的边界地图;响应于遥控设备的第一遥控指令移动,以生成第一连通路径,所述第一连通路径用于连通所述第一工作区域与所述第二工作区域;沿着所述第二工作区域的边界移动,以生成所述第二工作区域的边界地图;根据所述第一工作区域的边界地图、所述第二工作区域的边界地图以及所述第一连通路径探索所述第一工作区域和所述第二工作区域,以构建所述第一工作区域的区域地图和所述第二工作区域的区域地图。
3、上述方法中,移动机器人先建立各工作区域的边界地图以及按照遥控指令建立不同工作区域之间的连通路径,随后移动机器人可以基于不同工作区域之间的连通路径以及各工作区域的边界地图,自主探索构建各工作区域的区域地图。此方案中,移动机器人采集工作区域的边界地图耗时短,在各工作区域的边界地图以及不同区域间的连通路径建立完成后,工作区域的区域地图的建立过程无需用户参与,因此,用户等待时间短,对用户友好。
4、结合第一方面,在第一方面一种可能的实现方式中,所述沿着所述第一工作区域的边界移动,以生成所述第一工作区域的边界地图,包括:沿着所述第一工作区域的边界移动,并记录所述移动机器人在移动过程中的第一定位信息;根据所述第一定位信息,生成所述第一工作区域的边界地图。
5、结合第一方面,在第一方面一种可能的实现方式中,所述响应于遥控设备的第一遥控指令移动,以生成第一连通路径,包括:响应于所述第一遥控指令,从所述第一工作区域的边界上的第一位置移动至所述第二工作区域的边界上的第二位置,并根据移动过程中记录的第二定位信息生成所述第一连通路径。
6、结合第一方面,在第一方面一种可能的实现方式中,所述方法还包括:接收来自于所述遥控设备的探索建图指令;所述根据所述第一工作区域的边界地图、所述第二工作区域的边界地图以及所述第一连通路径探索所述第一工作区域和所述第二工作区域,以构建所述第一工作区域的区域地图和所述第二工作区域的区域地图,包括:响应于所述探索建图指令,根据所述第一工作区域的边界地图、所述第二工作区域的边界地图以及所述第一连通路径探索所述第一工作区域和所述第二工作区域,以构建所述第一工作区域的区域地图和所述第二工作区域的区域地图。
7、结合第一方面,在第一方面一种可能的实现方式中,所述生成所述第二工作区域的边界地图在所述第一工作区域的边界地图以及所述第一连通路径二者建立完成后执行,所述根据所述第一工作区域的边界地图、所述第二工作区域的边界地图以及所述第一连通路径探索所述第一工作区域和所述第二工作区域,以构建所述第一工作区域的区域地图和所述第二工作区域的区域地图,包括:根据所述第二工作区域的边界地图探索所述第二工作区域,以生成所述第二工作区域的区域地图;沿着所述第一连通路径从所述第二工作区域移动至所述第一工作区域;根据所述第一工作区域的边界地图探索所述第一工作区域,以生成所述第一工作区域的区域地图。
8、结合第一方面,在第一方面一种可能的实现方式中,,所述多区域中设置有充电桩,所述充电桩用于给移动机器人充电,所述充电桩设置在所述第一工作区域的边界上或者所述第一工作区域外。
9、结合第一方面,在第一方面一种可能的实现方式中,在所述充电桩设置在所述第一工作区域外的情况下,在沿着所述第一工作区域的边界移动之前,所述方法还包括:在所述充电桩处进行充电;响应于所述遥控设备的第二遥控指令移动,以生成第二连通路径,所述第二连通路径用于连通所述充电桩与所述第一工作区域。
10、结合第一方面,在第一方面一种可能的实现方式中,所述响应于所述遥控设备的第二遥控指令移动,以生成第二连通路径,包括:响应于所述第二遥控指令,从所述充电桩移动至所述第一工作区域的边界上的任一位置,并根据移动过程中记录的第三定位信息生成所述第二连通路径。
11、结合第一方面,在第一方面一种可能的实现方式中,所述第一工作区域的边界和/或所述第二工作区域的边界为所述移动机器人对视觉传感器采集的图像进行识别得到。
12、结合第一方面,在第一方面一种可能的实现方式中,所述移动机器人为割草机器人,所述第一工作区域以及所述第二工作区域为草坪。
13、第二方面,本技术提供了一种用于多区域的地图构建的装置,该装置包含于移动机器人中,该装置包括通信单元和处理单元,其中,多区域包括第一工作区域和第二工作区域,处理单元用于执行下述操作:使所述移动机器人沿着所述第一工作区域的边界移动,以生成所述第一工作区域的边界地图;响应于所述通信单元接收的来自于遥控设备的第一遥控指令使得所述移动机器人移动,以生成第一连通路径,所述第一连通路径用于连通所述第一工作区域与所述第二工作区域;使所述移动机器人沿着所述第二工作区域的边界移动,以生成所述第二工作区域的边界地图;根据所述第一工作区域的边界地图、所述第二工作区域的边界地图以及所述第一连通路径使得所述移动机器人探索所述第一工作区域和所述第二工作区域,以构建所述第一工作区域的区域地图和所述第二工作区域的区域地图。
14、结合第二方面,在第一方面一种可能的实现方式中,所述处理单元具体用于:使所述移动机器人沿着所述第一工作区域的边界移动,并记录所述移动机器人在移动过程中的第一定位信息;根据所述第一定位信息,生成所述第一工作区域的边界地图。
15、结合第二方面,在第二方面一种可能的实现方式中,所述处理单元具体用于:响应于所述第一遥控指令,使所述移动机器人从所述第一工作区域的边界上的第一位置移动至所述第二工作区域的边界上的第二位置,并根据移动过程中记录的第二定位信息生成所述第一连通路径。
16、结合第二方面,在第二方面一种可能的实现方式中,所述通信单元还用于:接收来自于所述遥控设备的探索建图指令;所述处理单元具体用于:响应于所述探索建图指令,根据所述第一工作区域的边界地图、所述第二工作区域的边界地图以及所述第一连通路径使所述移动机器人探索所述第一工作区域和所述第二工作区域,以构建所述第一工作区域的区域地图和所述第二工作区域的区域地图。
17、结合第二方面,在第二方面一种可能的实现方式中,所述生成所述第二工作区域的边界地图在所述第一工作区域的边界地图以及所述第一连通路径二者建立完成后执行,所述处理单元具体用于:根据所述第二工作区域的边界地图使所述移动机器人探索所述第二工作区域,以生成所述第二工作区域的区域地图;使所述移动机器人沿着所述第一连通路径从所述第二工作区域移动至所述第一工作区域;根据所述第一工作区域的边界地图使所述移动机器人探索所述第一工作区域,以生成所述第一工作区域的区域地图。
18、结合第二方面,在第二方面一种可能的实现方式中,所述多区域中设置有充电桩,所述充电桩用于给移动机器人充电,所述充电桩设置在所述第一工作区域的边界上或者所述第一工作区域外。
19、结合第二方面,在第二方面一种可能的实现方式中,在所述充电桩设置在所述第一工作区域外的情况下,在沿着所述第一工作区域的边界移动之前,所述处理单元还用于:使所述移动机器人在所述充电桩处进行充电;响应于所述遥控设备的第二遥控指令使所述移动机器人移动,以生成第二连通路径,所述第二连通路径用于连通所述充电桩与所述第一工作区域。
20、结合第二方面,在第二方面一种可能的实现方式中,所述处理单元具体用于:响应于所述第二遥控指令,使所述移动机器人从所述充电桩移动至所述第一工作区域的边界上的任一位置,并根据移动过程中记录的第三定位信息生成所述第二连通路径。
21、结合第二方面,在第二方面一种可能的实现方式中,所述第一工作区域的边界和/或所述第二工作区域的边界为所述移动机器人对视觉传感器采集的图像进行识别得到。
22、结合第二方面,在第二方面一种可能的实现方式中,所述移动机器人为割草机器人,所述第一工作区域以及所述第二工作区域为草坪。
23、第三方面,本技术提供了一种地图构建的芯片,该芯片包括处理器和存储器,其中,存储器用于存储程序指令;所述处理器调用所述存储器中的程序指令,以使安装至有上述芯片的移动机器人执行第一方面或者第一方面的任一可能的实现方式中的方法。
24、第四方面,本技术提供了一种移动机器人,该移动机器人包括上述第二方面或者第二方面任一可能的实现方式中的装置,或者包括第三方面所述的芯片。
25、第五方面,本技术提供了一种计算机可读存储介质,包括计算机指令,当所述计算机指令在被处理器运行时,使得安装有该处理器的移动机器人实现上述第一方面或者第一方面的任一可能的实现方式中的方法。
26、第六方面,本技术提供了一种计算机程序产品,当该计算机程序产品被处理器执行时,使得安装有该处理器的移动机器人实现上述第一方面或者第一方面的任一可能的实施例中的所述方法。
27、示例性地,该计算机程序产品可以为一个软件安装包。
- 还没有人留言评论。精彩留言会获得点赞!