激光雷达内参标定方法以及内参标定系统
本发明涉及激光雷达标定,具体涉及一种激光雷达内参标定方法以及内参标定系统。
背景技术:
1、激光雷达(lidar)作为现代传感器技术的重要组成部分,在自动驾驶、机器人技术、地形测绘等领域有着广泛的应用。激光雷达通过发射激光脉冲并接收物体反射回来的信号,计算目标的距离、速度和方位信息。然而,由于安装、制造以及结构上约束,导致实际测量值与理论值存在一定误差。为了确保激光雷达的测量精度和可靠性,对激光雷达进行精确的内参标定是必不可少的。现有的激光雷达标定方法往往依赖于复杂的物理环境搭建和繁琐的人工调整,不仅耗时费力,而且难以保证标定结果的一致性和准确性。
技术实现思路
1、为了提高激光雷达内参标定的精度并优化激光雷达内参标定的作业流程,本发明提供一种激光雷达内参标定方法以及内参标定系统。
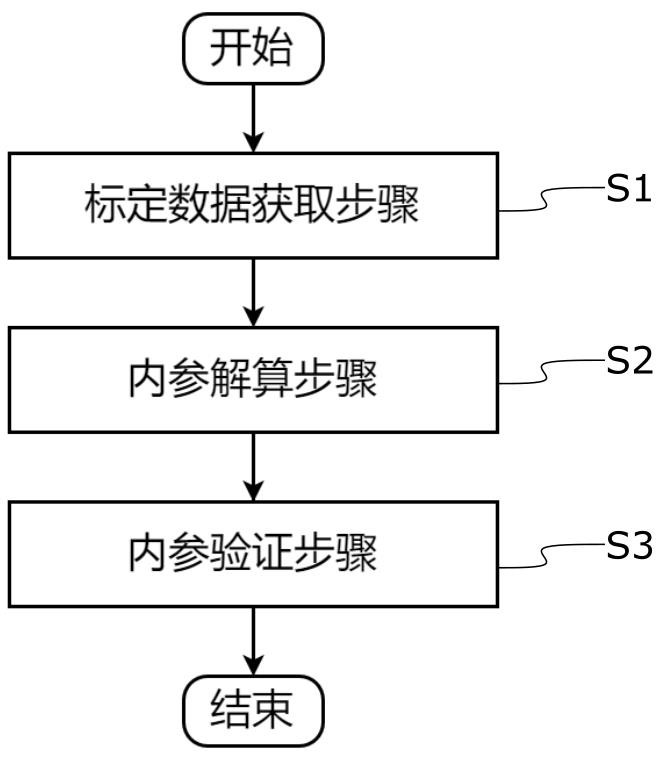
2、本技术提供一种激光雷达内参标定方法,包括:
3、s1、标定数据获取步骤:在激光雷达的额定工作范围内获取激光雷达与靶板的反射平面之间不同相对位置的多帧点云数据,其中每一帧点云数据记为 pc,点云数据帧数量记为 q;同时,对应于每一帧点云数据时,通过相机阵列3获取反射平面21的空间平面方程 n;对于每一帧点云数据综合得到标定数据 d=( pc, n)。于是标定数据集可表示为;
4、s2、内参解算步骤:标定参数为 α=( δρ, δθ, δφ, s, h, v),( δρ, δθ, δφ)为激光雷达的距离、水平方向角以及垂直角( ρ, θ, φ)的误差修正, s为距离测量尺度因子, h和 v为接收系统水平以及垂直向与设备原点的偏移,
5、标定后的测量值的修正方程为:
6、
7、内参优化模型中内参标定的目标在于让激光雷达测量得到的每个标定靶板上的点该靶板平面的距离最小化,内参优化模型的目标函数定义为:
8、
9、式中, p和qk为所述标定数据获取过程获取的标定数据, p为测量的所有平面集合, qk为该平面上所有点的集合, d( q, pk)为 qk中点 q到平面 pk的距离:
10、
11、上式中, xi、 yi、 zi为点 q的坐标,应用测量值的修正方程将其坐标用标定参数 α=( δρ, δθ, δφ, s, h, v)确定;
12、以数学优化算法解算上述系统在约束条件下的最优解确定激光雷达的标定参数 α=( δρ, δθ, δφ, s, h, v)。
13、优选地,所述s1标定数据获取步骤具体如下:
14、s11、调节激光雷达倾角为 θ1;控制激光雷达与靶板之间为设定距离 p1;采集激光雷达在 θ1角度下扫描得到的 p1位置靶板的 s帧点云数据,记为;当前状态下的标定数据,其中n1为当前状态下靶板的空间平面方程参数。
15、s12、重复s11步骤,采集 n组激光雷达在与靶板之间预设距离区间内的靶板扫描数据与相应靶板的空间平面方程参数,形成标定数据集;
16、s13、重复执行s11-s12步骤,采集 m组激光雷达在预设倾角区间内的对靶板扫描数据与相应靶板的空间平面方程参数,形成完整的标定数据集q=。
17、优选地,所述s1标定数据获取步骤中当前状态下靶板的空间平面方程参数由此时相机阵列中若干相机对反射平面分别成像得到的图像解算得到。
18、优选地,所述预设距离区间为0.5-50m,和/或,所述预设倾角区间为-45-45°。
19、优选地,所述s2内参解算步骤中的所述数学优化算法为列文伯格-马夸尔特算法。
20、优选地,在s2内参解算步骤完成后,还执行s3内参验证步骤:控制靶板以及激光雷达之间的相对位置变化,获取使用标定参数修正后的反射平面对应的多帧点云数据,同时,针对每一帧点云数据获取反射平面的空间平面方程,统计所述点云数据至相应的空间平面方程的平均误差。
21、优选地,若所述平均误差在阈值范围外,重复s1标定数据获取步骤以及s2内参解算步骤进行重新标定,直至所述平均误差在阈值范围内。
22、本技术还提供一种激光雷达内参标定系统,包括:
23、激光雷达,其位置固定;
24、靶板,相对于激光雷达的空间距离变化;具有有限面积的反射平面;
25、相机阵列,包括若干相机,相机用于组合确定所述反射平面的空间平面方程。
26、优选地,所述激光雷达能够绕定点空间旋转,或,所述反射平面能够绕定点空间旋转。
27、优选地,靶板经固定架于导轨上活动设置;导轨沿远离激光雷达方向延伸,
28、或,靶板于固定架上受控地旋转设置,
29、或,靶板经固定架于导轨上活动设置;导轨沿远离激光雷达方向延伸,相机阵列中的相机为两组,两组相机分置于导轨两侧,每组中的相机沿导轨的延伸方向依次间隔布置。
30、本技术的激光雷达内参标定方法以及内参标定系统实现了激光雷达的自动化标定,通过预先设定的流程可以实现激光雷达的自动化无人标定,相较于现有的激光雷达标定方法可以显著提升标定效率,降低人工投入。
31、本技术的激光雷达内参标定方法提供了一种全局内参整合标定方法,可以兼顾激光雷达的不同扫描状况,获得平衡了不同扫描距离与扫描倾角下修正精度的内参,从而使得激光雷达在额定的扫描范围内的性能得到较好的平衡,避免了边缘情况下性能精度的明显下降。
- 还没有人留言评论。精彩留言会获得点赞!