一种基于旋转的点云数据的特征处理系统及方法与流程
本发明涉及点云数据的三维变换处理,具体涉及一种基于旋转的点云数据的特征处理系统及方法。
背景技术:
1、在3d技术领域,点云数据由大量无序的点组成,每个点包含了其在空间中的坐标信息。由于点云数据的无序性和不规则性,传统的卷积神经网络(cnn)无法直接应用于点云数据的处理。为了解决这个问题,斯坦福大学的研究团队提出了pointnet模型,并在其中引入了t-net旋转网络,实现了对点云数据的规范化处理。t-net旋转网络通过对点云数据进行旋转,使得模型能够更好地学习到点云数据的特征。
2、然而,现有技术中为了确保点云数据在3d旋转过程中的旋转不变性,往往通过提供大量的旋转增强数据,即应用空间变换器网络在特征提取之前规范输入数据。虽然旋转增强数据在某种程度上对提高机器模型的旋转鲁棒性是有效的,但是基于大量的旋转增强数据,显然其计算成本较高,并且利用较为固定的规范方式进行数据增强,使得机器模型按照该固定的方式进行持续训练,其训练方式不够灵活,很难保证旋转鲁棒性得到保证,对此我们提出了一种基于旋转的点云数据的特征处理方法、装置及终端设备来解决上述问题。
技术实现思路
1、鉴于上述现有存在的问题,本发明旨在解决传统技术中的多个关键问题,包括提高点云数据获取和预处理的准确性,通过数据接收单元和预处理单元确保数据的完整性和质量;解决旋转不变特征提取的难题,利用旋转映射单元和池化处理单元提取出不受旋转影响的特征;提升多维特征处理的效率和精确度,通过聚类处理单元和特征融合单元实现高效且准确的特征表示;增强分类识别的准确性,借助分类器训练单元和分类识别单元提高识别系统的性能;以及优化数据和结果的管理,通过存储单元和管理单元实现对点云数据、特征和分类结果的有效管理,从而全面提升系统的整体性能和实用性。
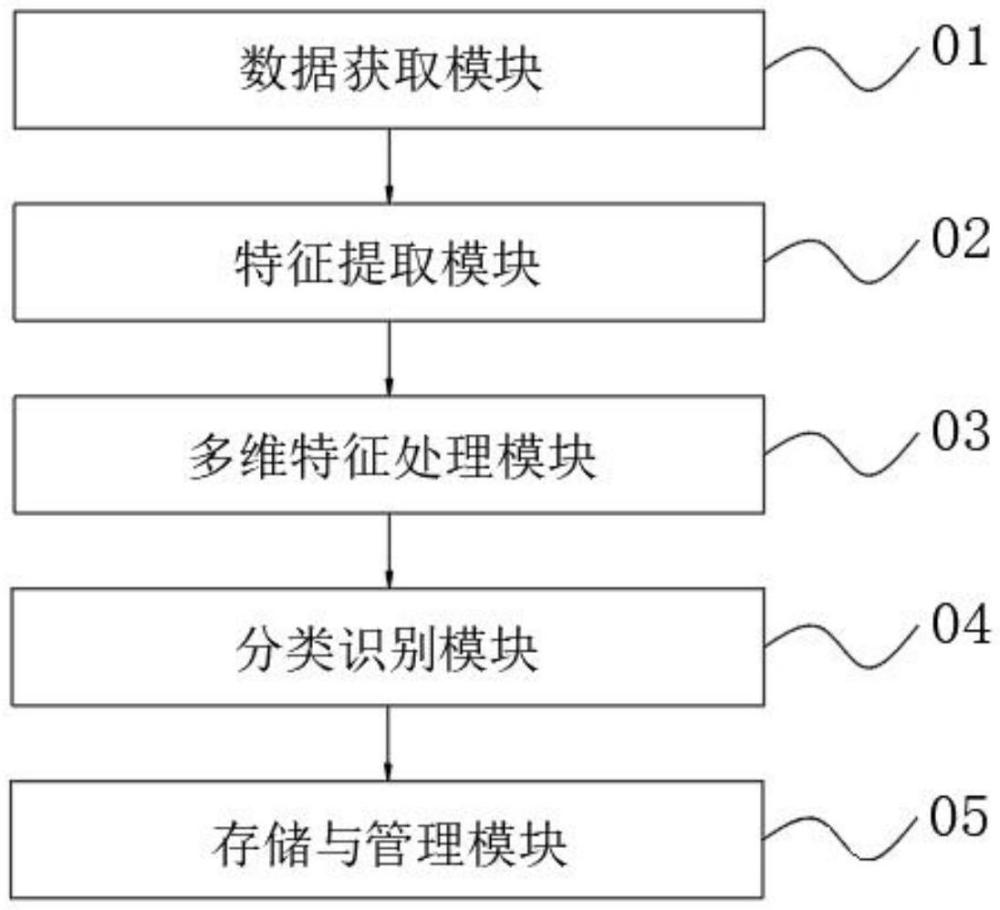
2、为解决上述技术问题,提出了一种基于旋转的点云数据的特征处理系统,包括数据获取模块、特征提取模块、多维特征处理模块、分类识别模块、存储与管理模块;
3、所述数据获取模块的输出端与特征提取模块的输入端电性连接;
4、所述特征提取模块的输出端与多维特征处理模块的输入端电性连接;
5、所述多维特征处理模块的输出端与分类识别模块的输入端电性连接;
6、所述分类识别模块的输出端与存储与管理模块的输入端电性连接。
7、作为本发明所述的一种基于旋转的点云数据的特征处理系统的一种优选方案,其中:所述数据获取模块包括数据接收单元和预处理单元,数据接收单元获取目标点云数据,接收来自各种传感器或设备的点云数据,包括激光雷达、摄像头、深度相机,其中,获取目标点云数据包含对目标物体的三维坐标信息进行特征提取和分类识别。
8、作为本发明所述的一种基于旋转的点云数据的特征处理系统的一种优选方案,其中:所述特征提取模块包括旋转映射单元和池化处理单元,从目标点云数据中提取旋转不变特征,利用旋转映射单元将目标点云数据从原始空间变换到特征空间,从而提取出旋转不变特征输入至池化处理单元处理。
9、作为本发明所述的一种基于旋转的点云数据的特征处理系统的一种优选方案,其中:所述多维特征处理模块包括聚类处理单元和特征融合单元,对提取的旋转不变特征进行多维特征处理,利用多个聚类处理单元对旋转不变特征进行聚类处理,得到多维特征表示,并通过特征融合单元进行特征融合;
10、所述多个聚类处理单元包括第一聚类模块、第二聚类模块和第三聚类模块,其中:
11、所述第一聚类模块以最大的聚类数目对所述旋转不变特征进行初步聚类;
12、所述第二聚类模块以比第一聚类模块小的聚类数目对初步聚类结果进行进一步聚类;
13、所述第三聚类模块以比第二聚类模块小的聚类数目对进一步聚类结果进行最终聚类。
14、所述分类识别模块包括分类器训练单元和分类识别单元,对多维特征处理后的旋转不变特征进行分类识别,利用分类器训练单元和分类识别单元将多维特征进行分类,得到分类结果。
15、作为本发明所述的一种基于旋转的点云数据的特征处理系统的一种优选方案,其中:所述存储与管理模块包括存储单元和管理单元,存储和管理目标点云数据、提取的特征以及分类结果。
16、本发明的另外一个目的是提供了一种基于旋转的点云数据的特征处理系统,本发明旨在解决点云数据处理中的关键技术问题,包括实现点云数据的旋转不变性,使得在不同观测角度下仍能准确识别和匹配目标物体;提高点云数据的特征提取和表示能力,通过多维特征处理生成丰富且准确的多维特征表示,从而提升处理效率和准确性;以及优化点云数据的分类识别效果,利用神经网络模型对旋转不变特征进行训练,显著提高分类识别的准确率。
17、作为本发明所述的一种基于旋转的点云数据的特征处理方法的一种优选方案,其特征在于,包括,
18、获取目标点云数据,通过三维扫描设备收集并预处理目标物体的点云数据,包括去除噪声、填补缺失数据;利用特征提取模块将目标点云数据从原始空间变换至特征空间,提取旋转不变特征;利用多维特征处理模块中多个聚类处理单元对旋转不变特征进行多维特征处理,生成多维特征表示,所述多个聚类模块依次按照由大至小的聚类数目顺序连接,并且每个聚类处理单元对旋转不变特征进行聚类处理生成不同层次的聚类结果;利用分类识别模块将多维特征表示进行分类得到分类结果。
19、作为本发明所述的一种基于旋转的点云数据的特征处理方法的一种优选方案,其中:所述提取旋转不变特征包括,利用k最邻近算法将所述目标点云数据从第一维空间变换至第二维空间;
20、将变换后的数据输入至第一神经网络模型进行训练,得到所述旋转不变特征;
21、所述第一神经网络模型为卷积神经网络、循环神经网络。
22、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现所述的一种基于旋转的点云数据的特征处理方法的步骤。
23、一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现所述的一种基于旋转的点云数据的特征处理方法的步骤。
24、本发明的有益效果:本发明通过旋转映射模块提取旋转不变特征,有效解决了点云数据因旋转而产生的特征变化问题,这种特征提取方法能够减少因视角变化引起的误差,提高点云数据处理的准确性和鲁棒性,从而在各种复杂场景和条件下实现更可靠的目标识别。
25、本发明利用多个聚类模块对旋转不变特征进行多维特征处理,生成多维特征表示,这种多层次、多维度的特征处理方式能够捕捉点云数据的更多细节和内在规律,从而增强深度学习模型的泛化能力,这意味着模型能够更好地适应不同类型和形态的目标物体,提高目标识别的适用范围和性能。
26、通过利用神经网络模型和聚类算法等先进技术,该专利能够简化数据处理流程,减少不必要的人工干预和计算开销,这不仅降低了计算成本,还提高了数据处理的效率和速度,为实际应用提供了更好的支持和保障。
- 还没有人留言评论。精彩留言会获得点赞!