一种基于功率流矩阵的分布式电推进飞行器混合动力系统架构设计方法与流程
本发明涉及飞行器总体设计,更具体的说是涉及一种基于功率流矩阵的分布式电推进飞行器混合动力系统架构设计方法。
背景技术:
1、当前以传统化石燃料为主的能源过度消耗为全球带来了严重环境污染问题,为此航空业界正大力开展采用新能源作为飞机主动力的可行性研究。随着锂离子电池、电力电子器件、发电机/驱动电机等新能源技术的发展和进步,国内外航空研发机构纷纷投入力量探索各种创新构型的分布式电推进飞行器在军民用领域的应用。
2、受限于当前电池能量密度、电机功率密度等电推进飞行器核心部件性能的影响,纯电推进飞行器在平台商载、飞行速度、航程、航时等方面与传统飞机平台相比仍有较大差距,使得纯电推进飞行器的应用场景极为有限。
3、混合动力电推进飞行器通过发动机与储能装置(锂电池、发电机)的结合,可适应飞机对发动机多状态点的设计要求,满足飞机起飞状态大功率和巡航状态低油耗的要求。混合动力电推进飞行器的发动机工作状态不受环境变化的影响,能够保持始终在最佳的工作区域内稳定运行,发动机具有良好的经济性和排放性指标。因而混合动力电推进飞行器的平台总体性能远超纯电推进飞机,与传统能源飞机平台相比其航程、航时、燃油经济性和环境影响性也更有优势。
4、虽然混合动力电推进飞行器可以减少燃料消耗并改善对环境的影响,但是其能源动力系统复杂性更高、总体架构设计要素更多、新增的配电系统带来飞行器总重增加,这些都对飞机总体设计带来更多挑战。
5、因此,如何提出一种分布式电推进飞行器混合动力系统架构设计方法,实现复杂混合动力系统与分布式电推进飞机平台的设计匹配,是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种分布式电推进飞行器混合动力系统架构设计方法,建立分布式电推进飞行器混合动力系统架构、功率分配系数、各部件的效率与飞行器的总重、速度、爬升率、高度等总体参数的直接联系,进而可以通过飞行器的总体要求直接高效迭代优化分布式电推进飞行器混合动力系统架构。
2、为了实现上述目的,本发明采用如下技术方案:
3、本发明提出一种基于功率流矩阵的分布式电推进飞行器混合动力系统架构设计方法,包括以下步骤:
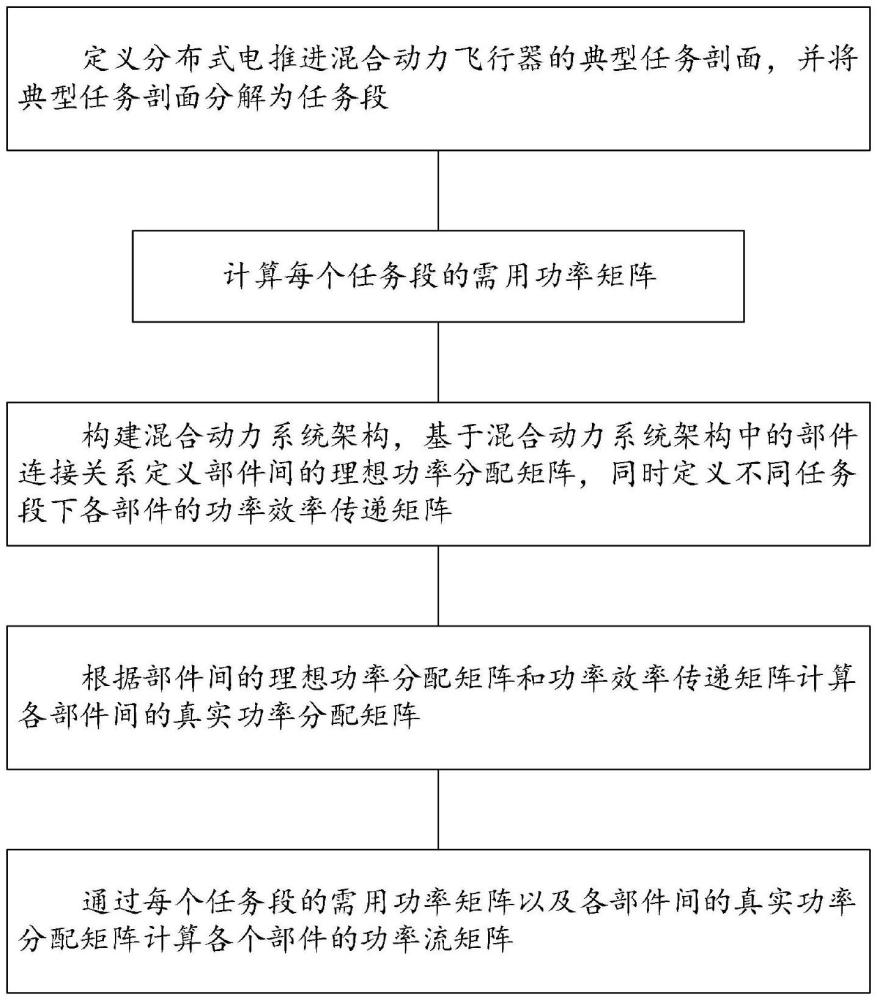
4、定义分布式电推进混合动力飞行器的典型任务剖面,并将典型任务剖面分解为任务段;
5、计算每个任务段的需用功率矩阵;
6、构建混合动力系统架构,基于所述混合动力系统架构中的部件连接关系定义部件间的理想功率分配矩阵,同时定义不同任务段下各部件的功率效率传递矩阵;
7、根据部件间的所述理想功率分配矩阵和所述功率效率传递矩阵计算各部件间的真实功率分配矩阵;
8、通过所述每个任务段的需用功率矩阵以及各部件间的真实功率分配矩阵计算各个部件的功率流矩阵。
9、优选的,所述每个任务段的需用功率矩阵pm_segi,req的计算公式如下:
10、
11、式中,μ为起降阶段起落架与地面的摩擦系数,m为分布式电推进混合动力飞行器的质量,θ为分布式电推进混合动力飞行器飞行的航迹角,v为飞机速度,h为飞行高度,cl为全机升力系数,cd为全机阻力系数,ρ为大气密度,s为机翼面积,w为飞机重力,g为重力加速度,vtakeoff为起飞滑跑速度,vclimb为爬升速度,vdecent为下降速度,vlanding为着陆速度,htakeoff为相对于海平面的起飞高度,hcurise为巡航高度,hlanding为相对于海平面的着陆高度。
12、优选的,所述混合动力系统架构包括能量源、功率源和推力源;所述能量源包括燃油、电池;所述功率源包括电机、涡轴发动机,电机包括依次相连的发电机和驱动电机;所述推力源为螺旋桨推力源;
13、由螺旋桨推力源驱动满足各任务段的需用功率需求;螺旋桨推力源分别由电机驱动;涡轴发动机和电池同时驱动电机;燃油为涡轴发动机提供能量。
14、优选的,部件间的理想功率分配矩阵包括:任务需用功率-推力源、推力源-功率源、功率源-功率源、能量源-功率源间的理想功率分配矩阵;
15、所述任务需用功率-推力源间的理想功率分配矩阵breq,ts,m_segi由推力源驱动分布式电推进混合动力飞行器的功率分配系数构成;
16、所述推力源-功率源间的理想功率分配矩阵bts,ps,m_segi中的元素包括电机驱动推力源的理想功率分配系数;
17、所述功率源-功率源间的理想功率分配矩阵bps,ps,m_segi中的元素包括涡轴发动机驱动电机的理想功率分配系数;
18、所述能量源-功率源间的理想功率分配矩阵bps,es,m_segi中的元素包括电池驱动电机的理想功率分配系数。
19、优选的,不同任务段下各部件的所述功率效率传递矩阵ηcomponent,m_segi由相应任务段下涡轴发动机功率传递效率ηturboshaft,m_segi、发电机功率传递效率ηgen,m_segi、驱动电机功率传递效率ηmotor,m_segi和螺旋桨功率传递效率ηprop,m_segi构成。
20、优选的,各个部件的功率流矩阵包括推力源功率流矩阵、直连功率源功率流矩阵、总功率源功率流矩阵和能量源功率流矩阵;
21、所述直连功率源功率流矩阵表示与推力源直接相连的功率源功率流矩阵;
22、所述总功率源功率流矩阵表示所述混合动力系统架构中所有功率源的功率源功率流矩阵。
23、优选的,推力源功率流矩阵ats,m_segi的计算公式为:
24、ats,m_segi(i)=pm_segi,req(i)·breq,ts,m_segi(i);
25、式中,ats,m_segi(i)为第i个任务段下的推力源功率流矩阵,breq,ts,m_segi(i)为第i个任务段下任务需用功率-推力源间的理想功率分配矩阵,pm_segi_req(i)为第i个任务段下的需用功率矩阵。
26、优选的,直连功率源功率流矩阵计算公式如下:
27、
28、式中,为第i个任务段下的直连功率源功率流矩阵,为第i个任务段下推力源-功率源间的真实功率分配矩阵。
29、优选的,总功率源功率流矩阵aps,m_segi表示如下:
30、
31、式中,aps,m_segi(i)为第i个任务段下的总功率源功率流矩阵,为第i个任务段下功率源-功率源间的真实功率分配矩阵。
32、优选的,能量源功率流矩阵表示为:
33、
34、式中,aes,m_segi(i)为第i个任务段下的能量源功率流矩阵,为第i个任务段下能量源-功率源间的真实功率分配矩阵。
35、经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种分布式电推进飞行器混合动力系统架构设计方法,将分布式电推进飞行器混合动力系统的架构设计与飞机平台总体设计直接融合,充分考虑了混合动力系统架构相关参数对飞机平台总体参数的影响,建立了分布式电推进飞行器混合动力系统架构、功率分配系数、各部件的效率与飞行器的总重、速度、爬升率、高度等总体参数的直接联系,进而可以通过飞行器的总体要求直接高效迭代优化分布式电推进飞行器混合动力系统架构,更好解决复杂混合动力系统与分布式电推进飞机平台的设计匹配问题。
- 还没有人留言评论。精彩留言会获得点赞!