一种矿用多适应性蛇形巡检机器人的制作方法
1.本实用新型涉及矿山输煤廊道的巡检设备技术领域,具体涉及一种矿用多适应性蛇形巡检机器人。
背景技术:
2.传统矿山输煤廊道巡检主要是由人手持相应巡检设备沿着皮带机装置逐步检查的过程。在长距离廊道的巡检任务中,人工巡检方式既耗时又耗力,于是搭载着可见光相机、红外热成像仪、拾音器的巡检机器人得到了广泛的应用,一方面煤矿皮带机的工作环境恶劣,尤其针对露天煤矿,机器人需要克服爬坡、霜冻、路面状态复杂等极端环境,另一方面运行轨道大多数采用的是工字钢结构,工字钢内部表面的不平整,会造成机器人运行不稳定,因此,如何保持机器人的稳定运行,且适用于狭小空间,以便采集到清晰且平稳的图像画面成为亟需解决的重要问题。
技术实现要素:
3.本实用新型提供了一种矿用多适应性蛇形巡检机器人,解决了现有巡检机器人运行不稳定,适用于狭小空间等问题。
4.本实用新型可通过以下技术方案实现:
5.一种矿用多适应性蛇形巡检机器人,用于矿用皮带机,包括机壳,该机壳通过行走单元与导轨连接,其特征在于:所述行走单元由蛇头、蛇身和蛇尾三部分连接而成;所述的蛇头部分设置有传感器单元,所述的蛇身包括电动机、与导轨的水平部转动连接的多个主动轮,以及与导轨的竖直部转动连接的多个从动轮,每个主动轮均通过竖直缓冲机构与机壳连接,每个从动轮通过水平缓冲机构与机壳连接,该竖直缓冲机构用于缓冲来自导轨的水平部的振动,该水平缓冲机构用于缓冲来自导轨的竖直部的振动,该电动机用于带动多个主动轮沿导轨的水平部转动向前运动,从而带动多个从动轮沿导轨的竖直部转动向前运动;所述的蛇尾部分内设置有控制单元。
6.进一步,所述竖直缓冲机构包括平行设置的两条滑轨,两者之间通过连接块连接,所述连接块上设置有电动机,所述电动机的输出轴与主动轮的中心孔配合,每条所述滑轨上均设置有滑块,所述滑块与机壳固定连接。
7.进一步,所述滑轨呈t形结构,包括竖直部和水平部,所述滑块呈u形结构,其u形凹口与滑轨的竖直部配合,其u形凹口的两个侧边分别通过弹簧与滑轨的竖直部两侧的水平部连接。
8.进一步,所述水平缓冲机构包括柱状结构的阻尼器,所述阻尼器的一端与机壳连接,另一端与u形支架连接,在所述u形支架的凹口设置有从动轮,所述从动轮的中心轴的两端分别与u形支架的两个侧边转动连接。
9.进一步,所述阻尼器的另一端与u形支架的接触部设置有多个应变片,每个所述应变片均与控制单元连接,用于检测u形支架对阻尼器的另一端所施加的压力。
10.进一步,所述导轨设置为工字钢结构,其水平部设置为工字钢结构的水平底板,竖直部设置工字钢结构中部的竖直板,多个主动轮被均分为两组,分别与竖直板两侧的水平底板转动连接,多个从动轮被均分为两组,分别与竖直板的两个侧面转动连接,
11.所述机壳设置成与工字钢结构的导轨配合的u形结构,包括对称的两个侧部和一个底部,每个所述侧部自上而下包括第一通道、第二通道和第三通道,所述第一通道用于固定阻尼器,所述第二通道用于放置竖直缓冲机构,所述第三通道用于放置电动机,所述底部用于放置供电电源。
12.本实用新型有益的技术效果在于:
13.通过竖直缓冲机构和水平缓冲机构对来自导轨的水平部和竖直部的振动进行缓冲,从而减少振动对机壳的影响,确保机器人可以稳定运行,为传感器单元提供一个稳定采集环境,提高采集数据的质量和检测精度。本实用新型的结构简单,制造方便,实用性强,使用效果好,适用于狭小空间,便于推广使用的单轨巡检机器人的行走机构。
附图说明
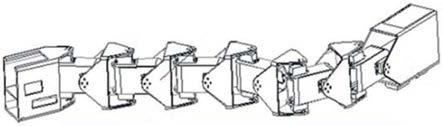
14.图1为本实用新型的总体结构的示意图一;
15.图2为本实用新型的总体结构的示意图二;
16.图3为本实用新型的行走单元的示意图;
17.图4为本实用新型的竖直缓冲机构的结果示意图;
18.其中,1
‑
机壳,2
‑
导轨,3
‑
电动机,4
‑
主动轮,5
‑
从动轮,6
‑
滑轨,7
‑
连接块,8
‑
滑块,9
‑
弹簧,10
‑
阻尼器,11
‑
u形支架。
具体实施方式
19.下面结合附图及较佳实施例详细说明本实用新型的具体实施方式。
20.如图1
‑
3所示,本实用新型提供了一种高稳定性的巡检机器人,用于矿用皮带机,包括机壳1,该机壳1通过行走单元与导轨2连接,该行走单元所由蛇头、蛇身和蛇尾三部分连接而成;所述的蛇头部分设置有传感器单元,所述的蛇身包括电动机3、与导轨2的水平部转动连接的多个主动轮4,以及与导轨2的竖直部转动连接的多个从动轮5,每个主动轮4均通过竖直缓冲机构与机壳1连接,每个从动轮5通过水平缓冲机构与机壳1连接,该竖直缓冲机构用于缓冲来自导轨2的水平部的振动,该水平缓冲机构用于缓冲来自导轨2的竖直部的振动,该电动机3用于带动多个主动轮4沿导轨2的水平部转动向前运动,从而带动多个从动轮5沿导轨2的竖直部转动向前运动。所述的蛇尾部分内设置有控制单元。这样,通过竖直缓冲机构和水平缓冲机构对来自导轨的水平部和竖直部的振动进行缓冲,从而减少振动对机壳的影响,确保机器人可以稳定运行,为机壳上的传感器单元提供一个稳定采集环境,提高采集数据的质量和检测精度。
21.如图4所示,该竖直缓冲机构包括平行设置的两条滑轨6,两者之间通过连接块7连接,在连接块7上设置有电动机3,该电动机3的输出轴与主动轮4的中心孔配合,每条滑轨上均设置有滑块8,该滑块8与机壳1固定连接。可以将滑轨6设置呈t形结构,包括竖直部和水平部,该水平部设置在机壳1上,而滑块8设置呈u形结构,其u形凹口与滑轨6的竖直部配合,并且该u形凹口的两个侧边分别通过弹簧9与滑轨6的竖直部两侧的水平部连接。由于滑块8
与壳体1固定连接,而主动轮4转动连接在导轨2上,这样,导轨2本身所产生的竖直方向的振动通过主动轮4传递到滑轨6上,或者外部环境所导致的壳体1在竖直方向的振动传递到滑块8上,都可以借助滑轨6和滑块8的相对运动以及弹簧9的弹性变形消耗掉,从而减少振动对机壳1的影响。
22.如图2
‑
3所示,该水平缓冲机构包括柱状结构的阻尼器10,该阻尼器10的一端与机壳1连接,另一端与u形支架11连接,在u形支架11的凹口设置有从动轮5,该从动轮5的中心轴的两端分别与u形支架11的两个侧边转动连接。该阻尼器10可以采用韩国koba公司生产的kms系列的小型自调节型阻尼器,其工作原理为在活塞头移动的过程中,液压油受力流过位于冲击管的孔口,产生所需的阻尼力,可以同时隔离振动并调节载荷高度,而且可以在变化的载荷下实现一致的隔振效果,能够提供多种类型的空气弹簧和空气缓冲器来满足具体的致动或隔振需求,并且适合在张紧、压缩方向或同时这两个方向上需要速度控制的高能、重载荷应用。我们可以将沿导轨2方向一字排列设置多个从动轮5,它们固定在一个u形支架11内部,但是阻尼器10与从动轮5一一对应设置,同时在阻尼器10与u形支架11的接触部设置有多个应变片,如设置4个,两个沿水平方向设置,两个沿竖直方向设置,每个应变片均与控制单元连接,用于检测u形支架11对阻尼器10所施加的压力。这样,当机器人对导轨2的转弯处,由于惯性作用,导轨2会通过u形支架11向阻尼器10施加作用力,而借助应变片就可以检测这些作用力,传递给控制单元,通过运算分析判断机器人的转动方向,然后采用差速控制的原理控制导轨2两侧电动机3的转速,可以在电动机3的轴端设置编码器,用于计算电动机3的转速,确保两个主动轮同步运动,便于在转弯时对两个主动轮4的转速进行差速控制,从而确保机器人在转向时的稳定运行,同时,通过导轨2传递过来的水平方向的振动也可以借助阻尼器11的阻尼作用消耗掉,从而减少振动对机壳1的影响。
23.一般情况下,该导轨2设置为工字钢结构,上文所述的水平部即为工字钢结构的水平底板,竖直部即为工字钢结构中部的竖直板,多个主动轮4被均分为两组,分别与竖直板两侧的水平底板转动连接,多个从动轮5被均分为两组,分别与竖直板的两个侧面转动连接,同时,为了给各个部件提供一个良好的安装环境,可以将机壳1设置成与工字钢结构的导轨2配合的u形结构,包括对称的两个侧部和一个底部,每个侧部自上而下包括第一通道、第二通道和第三通道,该第一通道用于固定阻尼器10,该第二通道用于放置竖直缓冲机构,该第三通道用于放置电动机3以及对应的驱动器等等,该底部用于放置供电电源、控制单元等等,这样,通道结构的机壳1既方便各个器件的安装,又便于散热。
24.该主动轮4和从动轮5可采用橡胶尼龙,尼龙橡胶能够为机器人提供更好的摩擦力,保证了主动轮4在钢轨上不打滑。
25.虽然以上描述了本实用新型的具体实施方式,但是本领域的技术人员应当理解,这些仅是举例说明,在不背离本实用新型的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,因此,本实用新型的保护范围由所附权利要求书限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1