自助提货装置、自助提货方法和控制装置与流程
1.本公开涉及物流领域,特别涉及一种自助提货装置、自助提货方法和用于自助提货的控制装置。
背景技术:
2.自助提货柜是一种柜式结构的自助提货装置。自助提货柜设置有很多格口,每个格口可存储一个包裹。用户接收包裹提取验证指令后,可以从相应格口取走自己的包裹。
3.受限于格口数量,自助提货柜的存储空间有限。如果自助提货柜的全部格口都被占用,该自助提货柜会无法接纳新包裹,无法为新包裹提供自助提货服务。
技术实现要素:
4.本公开一些实施例提出一种新的自助提货装置以及相应的自助提货方法,其能够与存储空间更大的包裹暂存库配合使用,为更多包裹提供自助提货服务,极大地提高自助提货服务能力。
5.本公开一些实施例提出一种自助提货装置,包括:环形传输机,自助提货口,用于接收包裹提取验证指令,第一传输机,与环形传输机对接,用于传输环形传输机与包裹的暂存库之间的包裹,其中,环形传输机上设置有能够转向的转轮设备,转轮设备设置于环形传输机与每个自助提货口的交接处。
6.在一些实施例中,转轮设备还设置于环形传输机与每个第一传输机的交接处。
7.在一些实施例中,还包括:自动搬运装置,被配置为执行出库任务,将目标包裹从暂存库的目标货位搬运到相应的目标第一传输机,或者,执行入库任务,将目标包裹从相应的目标第一传输机搬运到暂存库的目标货位。
8.在一些实施例中,还包括:第二传输机,与环形传输机对接,包括:出口传输组件或者进口传输组件中的至少一个,其中,进口传输组件用于传输准备进入环形传输机的正常包裹,出口传输组件用于传输从环形传输机出来的异常包裹,或者,传输从环形传输机出来的取走包裹的空的周转箱。
9.在一些实施例中,第一传输机包括:进口传输组件,用于传输从暂存库出库准备进入环形传输机的出库包裹,以及出口传输组件,用于传输从环形传输机出来准备进入暂存库的入库包裹。
10.在一些实施例中,自助提货口设置有重力检测装置和由重力变化触发的可伸缩隔板,可伸缩隔板下方设置有取走包裹的空的周转箱的回收处。
11.在一些实施例中,自助提货口有多个,或者,第一传输机有多个。
12.在一些实施例中,还包括:控制装置,被配置为控制目标转轮设备转向,或者,被配置为向自动搬运装置发送出库任务或入库任务。
13.本公开一些实施例提出一种自助提货方法,包括:获取任一个目标自助提货口接收的包裹提取验证指令,其中,包裹提取验证指令、目标货位号、目标周转箱编号、目标包裹
号具有对应关系;将包裹提取验证指令相应的装载有目标包裹的目标周转箱,从暂存库中的目标货位搬运到出库目标第一传输机,使得目标周转箱由出库目标第一传输机进入环形传输机进行轮转;分配目标周转箱编号相应的流向为目标自助提货口编号,以控制第一目标转轮设备通过转向将环形传输机上的目标周转箱导入到目标自助提货口,以便用户从目标自助提货口取走目标包裹,其中,第一目标转轮设备是目标自助提货口与环形传输机交接处的转轮设备。
14.在一些实施例中,所述将包裹提取验证指令相应的装载有目标包裹的目标周转箱,从暂存库中的目标货位搬运到出库目标第一传输机包括:根据包裹提取验证指令相应的目标货位号、目标周转箱编号以及有空闲位置的出库目标第一传输机编号,生成出库任务,并发送给自动搬运装置,以指示自动搬运装置将目标周转箱从暂存库中的目标货位搬运到出库目标第一传输机。
15.在一些实施例中,出库任务包括:搬运对象为:目标周转箱编号,搬运出发地为:暂存库中的目标货位号,搬运目的地为:出库目标第一传输机编号。
16.在一些实施例中,所述分配目标周转箱编号相应的流向为目标自助提货口编号包括:判断目标自助提货口是否有缓存资源,如果目标自助提货口有缓存资源,分配目标周转箱编号相应的流向为目标自助提货口编号,如果目标自助提货口没有缓存资源,暂不分配目标周转箱编号相应的流向,使得目标周转箱在环形传输机中轮转。
17.在一些实施例中,如果目标包裹超时仍未被取走,异常的目标周转箱由第一目标转轮设备进入环形传输机轮转,分配目标周转箱编号相应的流向为第二传输机的出口传输组件,以控制第二目标转轮设备通过转向将环形传输机上的异常的目标周转箱导入到第二传输机的出口传输组件,以便将异常的目标周转箱移出,其中,第二目标转轮设备是第二传输机的出口传输组件与环形传输机交接处的转轮设备。
18.在一些实施例中,在目标包裹被取走之后,空的目标周转箱经由第一目标转轮设备进入环形传输机轮转,分配目标周转箱编号相应的流向为第二传输机的出口传输组件,以控制第二目标转轮设备通过转向将环形传输机上的空的目标周转箱导入到第二传输机的出口传输组件,以便将空的目标周转箱移出,其中,第二目标转轮设备是第二传输机的出口传输组件与环形传输机交接处的转轮设备。
19.在一些实施例中,在目标包裹被取走之后,提示将空的目标周转箱移出,或者,目标自助提货口处的重力检测装置检测到可伸缩隔板上方的重力减轻至预设范围,触发可伸缩隔板缩回,使得空的目标周转箱掉落至可伸缩隔板下方的空的周转箱的回收处,然后可伸缩隔板自动伸出。
20.在一些实施例中,在目标周转箱从暂存库中的目标货位搬走后,更新目标货位的库存状态为未占用;在目标周转箱被搬运到出库目标第一传输机后,更新自动搬运装置的状态为无任务状态。
21.在一些实施例中,包裹提取验证指令还与目标订单号有对应关系;目标订单对应一个或多个目标包裹,在全部目标包裹被取走之后,更新目标订单的订单状态为已签收。
22.在一些实施例中,还包括:在用户接收包裹提取验证指令之前,装载有目标包裹的目标周转箱经由第二传输机的进口传输组件进入环形传输机,获取位于第二传输机的进口传输组件处的扫描设备识别并上报的目标周转箱编号;
23.分配目标周转箱编号相应的流向为有空闲位置的入库目标第一传输机编号,以控制第三目标转轮设备通过转向将环形传输机上的目标周转箱导入到入库目标第一传输机,第三目标转轮设备是入库目标第一传输机与环形传输机交接处的转轮设备;为目标周转箱编号分配暂存库中空闲的目标货位号;将目标周转箱从入库目标第一传输机搬运到暂存库中的目标货位;生成包裹提取验证指令并通知用户,建立包裹提取验证指令、目标货位号、目标周转箱编号、目标包裹号之间的对应关系。
24.在一些实施例中,所述将目标周转箱从入库目标第一传输机搬运到暂存库中的目标货位包括:根据目标周转箱编号相应的入库目标第一传输机编号和暂存库中的目标货位号,生成入库任务,并发送给自动搬运装置,以指示自动搬运装置将目标周转箱从入库目标第一传输机搬运到暂存库中的目标货位。
25.在一些实施例中,入库任务包括:搬运对象为:目标周转箱编号,搬运出发地为:入库目标第一传输机编号,搬运目的地为:暂存库中的目标货位号。
26.在一些实施例中,在目标周转箱搬运到暂存库中的目标货位后,更新目标货位的库存状态为占用,或者,更新自动搬运装置的状态为无任务状态;或者,在目标周转箱搬离入库目标第一传输机后,释放入库目标第一传输机被目标周转箱占用的缓存资源。
27.本公开一些实施例提出一种用于自助提货的控制装置,包括:存储器;以及耦接至所述存储器的处理器,所述处理器被配置为基于存储在所述存储器中的指令,执行自助提货方法。
28.本公开一些实施例提出一种非瞬时性计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现自助提货方法的步骤。
附图说明
29.下面将对实施例或相关技术描述中所需要使用的附图作简单地介绍。根据下面参照附图的详细描述,可以更加清楚地理解本公开。
30.显而易见地,下面描述中的附图仅仅是本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
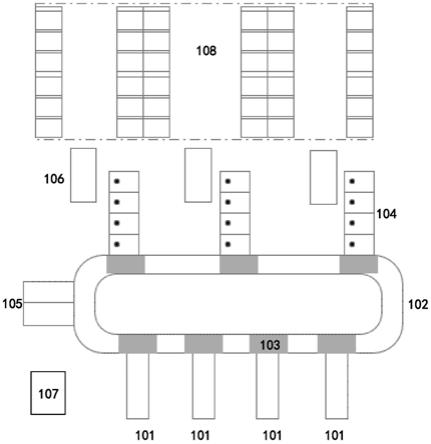
31.图1示出本公开一些实施例的自助提货装置的示意图。
32.图2示出本公开一些实施例的能够将包裹自动存储到暂存库的自动入库方法的示意图。
33.图3示出本公开一些实施例的自助提货方法的示意图。
34.图4示出本公开一些实施例用于自助提货的控制装置的结构示意图。
具体实施方式
35.下面将结合本公开实施例中的附图,对本公开实施例中的技术方案进行清楚、完整地描述。
36.除非特别说明,否则,本公开中的“第一”“第二”“第三”等描述用来区分不同的对象,并不用来表示大小或时序等含义。
37.图1示出本公开一些实施例的自助提货装置的示意图。
38.如图1所示,该实施例的自助提货装置包括:自助提货口101、环形传输机102、转轮
设备103、第一传输机104,还包括:第二传输机105、自动搬运装置106、控制装置107等设备。下面分别描述各设备。
39.自助提货口101,用于接收包裹提取验证指令,以便用户提取包裹。自助提货口101可设置多个,同时为多个用户提供自助提货服务。自助提货口101也可设置一个。自助提货口101可设置信息输入设备,用于接收包裹提取验证指令等信息。信息输入设备例如包括平板电脑、扫描设备、或其他能够输入信息的设备。包裹提取验证指令包括但不限于提货码,二维码,或其他形式的用于提货的码。例如,平板电脑接收用户手动输入的提货码,或者,扫描设备扫描用户出示的二维码,或者,信息输入设备获取扫描二维码的用户终端相应的用户身份信息。此外,根据周转箱回收方式的需要,自助提货口101还可设置重力检测装置和由重力变化触发的可伸缩隔板,可伸缩隔板下方可设置取走包裹的空的周转箱的回收处。
40.环形传输机102是一种首位相连的环形结构的能够传输货物的设备。在本公开中环形传输机102不仅具有传输包裹的功能,还具有缓存包裹的功能。暂未分配目的地的包裹能够在环形传输机102中轮转等候,分配目的地的包裹能够从相应的出口导出。
41.环形传输机102上设置有能够转向的转轮设备103。转轮设备103例如可以工作在默认方向,根据控制再转向,以改变位于转轮设备103的对象的流向。转轮设备103可设置于环形传输机102与每个自助提货口101的交接处,以便在包裹出库时将包裹从环形传输机102导出到相应的自助提货口101。转轮设备103还可设置于环形传输机102与每个第一传输机104的交接处,以便在包裹入库时将包裹从环形传输机102导出到相应的第一传输机104。
42.第一传输机104,与环形传输机102对接,用于传输环形传输机102与包裹的暂存库之间的包裹。第一传输机104可以包括:进口传输组件,用于传输从暂存库出库准备进入环形传输机102的出库包裹,以及,出口传输组件,用于传输从环形传输机102出来准备进入暂存库的入库包裹。为了提高进出库效率,第一传输机104可以设置多个。其中,可以在环形传输机102与每个第一传输机104的出口传输组件的交接处设置转轮设备103,以便在包裹入库时将包裹从环形传输机102导出到相应的第一传输机104的出口传输组件。第一传输机104例如可以是直线型,使得包裹能够更快地被传输。
43.第二传输机105,与环形传输机102对接。第二传输机105可包括:出口传输组件或者进口传输组件中的至少一个。其中,进口传输组件用于传输准备进入环形传输机102的正常包裹。出口传输组件用于传输从环形传输机102出来的异常包裹,或者,传输从环形传输机102出来的取走包裹的空的周转箱。为了提高进出库效率,第二传输机105可以设置多个。第二传输机105例如可以是直线型,使得包裹能够更快地被传输。第二传输机105,例如第二传输机105的进口传输组件,可设置扫描设备,用于识别周转箱编号等。
44.自动搬运装置106是有一定的智能性,能够根据指令自动搬运货物的装置。自动搬运装置106例如可以是货运机器人,但不限于所举示例。自动搬运装置106被配置为执行出库任务,将目标包裹从暂存库的目标货位搬运到相应的目标第一传输机104,或者,执行入库任务,将目标包裹从相应的目标第一传输机104搬运到暂存库的目标货位。
45.控制装置107是具有控制功能的设备,如处理器或包括处理器等。控制装置107被配置为控制目标转轮设备103转向,或者,被配置为向自动搬运装置106发送出库任务或入库任务。控制装置107与其他通信对象通信连接,以便传输各种信息。其中,通信连接方式包括但不限于各种无线连接方式和有线连接方式。控制装置107的通信对象可以是被控制对
象,或者需要上报信息给控制装置107的对象。控制装置107的通信对象包括但不限于自动搬运装置106、转轮设备103、信息输入设备、扫描设备等。
46.图1中还示出了包裹的暂存库108,暂存库108具有非常大的存储空间,暂存库108中可以有很多货架和货位,每个货位可以存储包裹或者装载有包裹的周转箱。暂存库108相对于普通的自助提货柜具有更大的存储空间。自助提货装置能够与存储空间更大的暂存库108配合使用,为更多包裹提供自助提货服务,极大地提高自助提货服务能力。
47.通过一定的方法,将包裹存储到暂存库,然后,利用自助提货装置,并配合暂存库,就可以为用户提供自助提货服务。其中,可以利用人工的方法,将包裹存储到暂存库。本公开提供了一种自动入库方法,能够将包裹自动存储到暂存库,无需人工干预,下面结合图2描述。
48.图2示出本公开一些实施例的能够将包裹自动存储到暂存库的自动入库方法的示意图。
49.如图2所示,自动入库方法包括:步骤201~210。
50.步骤201,目标订单的目标包裹被投递到目标周转箱后,目标周转箱被投递到第二传输机,位于第二传输机的进口传输组件处的扫描设备识别目标周转箱编号并上报控制装置。其中,目标周转箱编号、目标包裹号、目标订单号具有对应关系。
51.步骤202,控制装置判断暂存库是否存在空闲货位,如果暂存库存在空闲货位,为目标周转箱分配暂存库中空闲的目标货位(目标货位用目标货位号标识);并判断各第一传输机是否存在空闲位置,如果任一个第一传输机存在空闲位置,为目标周转箱编号分配相应的流向为有空闲位置的第一传输机编号(称为,入库目标第一传输机编号),如果所有第一传输机均不存在空闲位置,暂不分配第一传输机编号,使得目标周转箱在环形传输机轮转,直至任一个第一传输机出现空闲位置;如果暂存库不存在空闲货位,发出警告,提示暂存库已满。
52.步骤203,目标周转箱经由第二传输机进入环形传输机,在环形传输机轮转过程中,经过各转轮设备,每个转轮设备识别目标周转箱编号,并从控制装置获取目标周转箱编号相应的流向,其中,目标周转箱编号相应的目标转轮设备(称为第三目标转轮设备,也即入库目标第一传输机与环形传输机的交接处的转轮设备),通过转向将环形传输机上的目标周转箱导入到入库目标第一传输机,在入库目标第一传输机的空闲位置缓存起来,其他非第三目标转轮设备则不转向使得目标周转箱在环形传输机中轮转。
53.步骤204,控制装置根据目标周转箱编号相应的入库目标第一传输机和暂存库中的目标货位生成入库任务,并发送给自动搬运装置,入库任务包括搬运对象:目标周转箱编号,搬运出发地:入库目标第一传输机编号,搬运目的地:暂存库中的目标货位号等入库任务信息,用于指示自动搬运装置将目标周转箱从入库目标第一传输机搬运到暂存库中的目标货位。
54.步骤205,自动搬运装置接收到入库任务,根据入库任务生成移动路线:原始位置-入库目标第一传输机-目标货位-原始位置。
55.该移动路线可更改,例如,到达目标货位后,如果接收到新任务,则无需回到原始位置,而是从当前位置直接移动到新任务指定的位置。
56.步骤206,自动搬运装置按照移动路线移动并执行相应的入库任务,从原始位置移
动到入库目标第一传输机,在入库目标第一传输机根据目标周转箱编号识别、定位、提取目标周转箱,然后将目标周转箱搬运到暂存库中的目标货位。
57.步骤207,目标周转箱被自动搬运装置提取后,释放入库目标第一传输机的被目标周转箱占用的缓存资源。
58.步骤208,目标周转箱被搬运到暂存库中的目标货位后,更新目标货位的库存状态,例如将目标货位标记为占用。
59.步骤209,目标周转箱被搬运到暂存库中的目标货位后,释放自动搬运装置资源,自动搬运装置变为无任务状态,如果接收到新任务,如新入库任务或新出库任务,执行新任务,如果没有接收到新任务,可回归到原始位置。
60.步骤210,目标周转箱被搬运到暂存库中的目标货位后,生成包裹提取验证指令,并发送给相应的用户,并建立包裹提取验证指令、目标货位号、目标周转箱编号、目标包裹号、目标订单号之间的对应关系。
61.上述实施例,利用自助提货装置,实现了将包裹自动存储到暂存库的自动入库方法,无需人工干预,节省人力。
62.下面结合图3描述,利用自助提货装置,并配合暂存库,实现的自助提货方法,为用户提供自助提货服务。
63.图3示出本公开一些实施例的自助提货方法的示意图。
64.如图3所示,自助提货方法包括:步骤301~312。
65.步骤301,用户在任一个目标自助提货口通过信息输入设备输入包裹提取验证指令,目标自助提货口接收包裹提取验证指令。其中,如前所述,包裹提取验证指令、目标货位号、目标周转箱编号、目标包裹号、目标订单号具有对应关系。
66.步骤302,控制装置验证包裹提取验证指令,例如,验证包裹提取验证指令是否存在、相应状态是否为未提取状态等,如果包裹提取验证指令存在且是未提取状态,包裹提取验证指令验证通过。
67.如果包裹提取验证指令验证通过,控制装置根据包裹提取验证指令相应的目标货位号、目标周转箱编号以及当前有空闲位置的第一传输机编号(称为,出库目标第一传输机编号),生成出库任务,并发送给自动搬运装置。其中,出库任务包括搬运对象:目标周转箱编号,搬运出发地:暂存库中的目标货位号,搬运目的地:出库目标第一传输机编号等出库任务信息,用于指示自动搬运装置将目标周转箱从暂存库中的目标货位搬运到出库目标第一传输机。
68.步骤303,自动搬运装置接收到出库任务,根据出库任务生成移动路线:原始位置-目标货位-出库目标第一传输机-原始位置。
69.该移动路线可以更改,例如,到达出库目标第一传输机后,如果接收到新任务,则无需回到原始位置,而是从当前位置直接移动到新任务指定的位置。
70.步骤304,自动搬运装置按照移动路线移动并执行相应的出库任务,从原始位置移动到暂存库的目标货位附近,从目标货位提取目标周转箱,然后将目标周转箱搬运到出库目标第一传输机,使得目标周转箱经由出库目标第一传输机进入环形传输机。
71.步骤305,目标周转箱被自动搬运装置提取后,更新目标货位的库存状态,例如将目标货位标记为未占用。
72.步骤306,目标周转箱被搬运到出库目标第一传输机后,释放自动搬运装置资源,自动搬运装置变为无任务状态,如果接收到新任务,如新入库任务或新出库任务,执行新任务,如果没有接收到新任务,可回归到原始位置。
73.步骤307,控制装置判断目标自助提货口是否有缓存资源,如果目标自助提货口有缓存资源,分配目标周转箱编号相应的流向为目标自助提货口编号,如果目标自助提货口没有缓存资源,暂不分配目标周转箱编号相应的流向,使得目标周转箱在环形传输机中轮转。
74.步骤308,目标周转箱在环形传输机轮转过程中,经过各转轮设备,每个转轮设备识别目标周转箱编号,并从控制装置获取目标周转箱编号相应的流向,其中,第一目标转轮设备(也即目标自助提货口与环形传输机的交接处的转轮设备)通过转向将环形传输机上的目标周转箱导入到目标自助提货口,其他非第一目标转轮设备则不转向,使得目标周转箱在环形传输机中轮转。
75.步骤309,目标周转箱被导入到目标自助提货口后,目标自助提货口处的信息输入设备提示(可通过语音或信息显示等方式提示)用户取件,如“包裹已到达自助提货口,请取件”,必要时,还可以提示取件方式,例如,点击屏幕某控件进行取件。
76.步骤310,用户点击屏幕进行取件,目标自助提货口的闸门打开,用户从目标自助提货口取走目标包裹,闸门关闭。如果目标包裹相应的目标订单仅有一个包裹,则更新订单状态为已签收,如果目标包裹相应的目标订单有多个包裹,点击“提取下一个包裹”继续取件,直至目标订单的全部包裹全部取完,然后再更新订单状态为已签收。
77.步骤311,用户每取走一个目标包裹后,目标包裹相应的空的目标周转箱被移出,及时释放目标自助提货口的缓存资源。其中,目标周转箱被移走的方式包括但不限于以下三种方式:
78.第一种,提示将空的目标周转箱移出,以便由用户或工作人员及时移出空的目标周转箱。
79.第二种,目标自助提货口处的重力检测装置检测到可伸缩隔板上方的重力减轻至预设范围,触发可伸缩隔板缩回,使得空的目标周转箱掉落至可伸缩隔板下方的空的周转箱的回收处,然后可伸缩隔板自动伸出。回收处的周转箱可定期回收。隔板的缩回和伸出,可由隔板配合重力检测装置自行触发,也可由控制装置控制。
80.第三种,针对空的目标周转箱,控制装置更新目标周转箱编号相应的流向为第二传输机的出口传输组件,目标周转箱被移回第一目标转轮设备,使得目标周转箱经由第一目标转轮设备进入环形传输机轮转,经过各转轮设备,每个转轮设备识别目标周转箱编号,并从控制装置获取目标周转箱编号相应的流向,其中,第二目标转轮设备(也即第二传输机的出口传输组件与环形传输机的交接处的转轮设备)通过转向将环形传输机上的目标周转箱导入到第二传输机的出口传输组件,以便将空的目标周转箱移出,其他非第二目标转轮设备则不转向,使得目标周转箱在环形传输机中轮转。
81.步骤312,如果目标包裹超时仍未被取走,针对此类异常的目标周转箱,控制装置更新目标周转箱编号相应的流向为第二传输机的出口传输组件,目标周转箱被移回第一目标转轮设备,使得目标周转箱经由第一目标转轮设备进入环形传输机轮转,经过各转轮设备,每个转轮设备识别目标周转箱编号,并从控制装置获取目标周转箱编号相应的流向,其
中,第二目标转轮设备(也即第二传输机的出口传输组件与环形传输机的交接处的转轮设备)通过转向将环形传输机上的目标周转箱导入到第二传输机的出口传输组件,以便将异常的目标周转箱移出,其他非第二目标转轮设备则不转向,使得目标周转箱在环形传输机中轮转。
82.上述实施例,利用自助提货装置,并配合暂存库,实现了自助提货方法,为用户提供自助提货服务。此外,还能够自动处理取件异常的包裹,鲁棒性好;还能够自动处理取件后的空的周转箱,方便回收。如果自助提货口有多个,可以同时为多个用户提供自助提货服务。
83.图4示出本公开一些实施例的用于自助提货的控制装置的结构示意图。
84.如图4所示,该实施例的控制装置107包括:存储器410以及耦接至该存储器410的处理器420,处理器420被配置为基于存储在存储器410中的指令,执行前述任意一些实施例中的自助提货方法和自动入库方法。
85.其中,存储器410例如可以包括系统存储器、固定非易失性存储介质等。系统存储器例如存储有操作系统、应用程序、引导装载程序(boot loader)以及其他程序等。
86.控制装置107还可以包括输入输出接口430、网络接口440、存储接口450等。这些接口430,440,450以及存储器410和处理器420之间例如可以通过总线460连接。其中,输入输出接口430为显示器、鼠标、键盘、触摸屏等输入输出设备提供连接接口。网络接口440为各种联网设备提供连接接口。存储接口450为sd卡、u盘等外置存储设备提供连接接口。
87.本领域内的技术人员应当明白,本公开的实施例可提供为方法、系统、或计算机程序产品。因此,本公开可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本公开可采用在一个或多个其中包含有计算机程序代码的非瞬时性计算机可读存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
88.本公开是参照根据本公开实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解为可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
89.这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
90.这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
91.以上所述仅为本公开的较佳实施例,并不用以限制本公开,凡在本公开的精神和
原则之内,所作的任何修改、等同替换、改进等,均应包含在本公开的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1