门禁消防智能联动系统的制作方法
1.本技术涉及门禁系统的领域,尤其是涉及门禁消防智能联动系统。
背景技术:
2.门禁系统和应用于门禁系统的门禁机通常应用于许多场所的出入口,如小区门口或家门口,用于控制人员的出入权限、增强安保程度,当场所内发生火灾等灾害,门禁系统的合理设置就能为抢险或逃生获取更多时间,如公布号为cn110047188a、申请日为2019年5月15日的中国专利公开了一种门禁机及门禁系统,所述门禁机包括主控制板和人体感知卡,主控制板上设置有插座、主控制芯片、人体信号采集器和图像采集模块,人体感知卡上设置有与插座对应的插针,人体感知卡通过所述插针插接在主控制板的插座上,并通过插座分别与主控制芯片和人体信号采集器电性连接;图像采集模块与所述主控制芯片电性连接。
3.针对上述中的相关技术,发明人认为存在有以下缺陷:
4.上述门禁机在使用的时候,将人体感知卡插接在主控制板上,从而激活或关闭门禁系统,由于门禁机与门禁系统的使用者具有不同的使用习惯,不同的使用者会对主控制板的操作高度存在不同要求。
技术实现要素:
5.为了解决现有主控制板操作高度单一导致适用性差的问题,本技术提供门禁消防智能联动系统。
6.本技术提供的门禁消防智能联动系统采用如下的技术方案:
7.门禁消防智能联动系统,包括门禁机和用于激活门禁机的控制板,还包括安装座,所述控制板安装于所述安装座,所述安装座周向限位、沿竖直方向滑移安装于所述门禁机,所述门禁机上转动连接有螺杆,所述安装座螺纹连接于所述螺杆,所述螺杆穿过且与所述安装座螺纹连接,所述门禁机上设置有连接于所述螺杆的驱动件,所述驱动件用于驱动所述螺杆转动。
8.通过采用上述技术方案,操作驱动件时,驱动件驱动螺杆转动,由于安装座周向限位、轴向滑移,因此螺杆的转动带动安装座沿螺杆的长度方向滑移,从而适应不同用户的使用习惯,当用户欲通过门禁机时,操作驱动件调整安装座至所需高度,再操作控制板激活门禁机。
9.可选的,所述驱动件设置有两个,两所述驱动件沿竖直方向间距设置。
10.通过采用上述技术方案,不同的用户具有不同的身高,当控制板激活门禁机的方式为人脸识别时,控制板的高度必须与用户的身高相适应,因此设置两个不同高度的驱动件,当身高相对较高的用户欲通过门禁机时,操作位于上方的驱动件,当身高相对较低的用户欲通过门禁机时,可能会够不到上方的驱动件,因此可以操作位于下方的驱动件,驱动件驱动螺杆转动,带动安装座在竖直方向上滑移,待安装座滑移到相应高度后再操作控制板
激活门禁机。
11.可选的,所述门禁机上固定连接有限位杆,所述限位杆沿竖直方向设置,所述限位杆穿设于所述安装座。
12.通过采用上述技术方案,竖直方向固定的限位杆穿设过安装座,使安装座不会发生周向转动,螺杆在转动的时候,安装座不会随螺杆作同步转动,而是沿螺杆的长度方向滑移。
13.可选的,所述驱动件包括手轮、第一锥齿轮和转动安装于所述门禁机的第二锥齿轮,所述第一锥齿轮固定连接于所述螺杆的端部,所述第二锥齿轮与所述第一锥齿轮啮合,所述手轮与所述第二锥齿轮固定连接。
14.通过采用上述技术方案,转动手轮,手轮带动第二锥齿轮转动,第二锥齿轮带动第一锥齿轮转动,从而带动螺杆转动。
15.可选的,所述控制板转动连接于所述安装座,所述控制板的转动轴水平设置,所述安装座上安装有用于调节所述控制板的转动角度并自锁的调节件。
16.通过采用上述技术方案,控制板转动安装于安装座上,这样,通过调节件就可以调整控制板与安装座之间的角度,调整控制板的朝向,更加贴合不同用户的使用习惯。
17.可选的,所述控制板通过转动件转动安装于所述安装座,所述转动件包括连接轴、转动块和转动座,所述转动块固定连接于所述控制板,所述转动座一体连接于所述安装座,所述连接轴与所述转动块固定连接,所述连接轴与所述转动座转动连接,所述连接轴与所述调节件连接。
18.通过采用上述技术方案,控制板通过连接轴转动安装于安装座上,调节件调节连接轴的转动角度,从而调节控制板与安装座间的角度。
19.可选的,所述调节件包括蜗轮和蜗杆,所述蜗轮固定连接于所述连接轴,所述蜗杆转动安装于所述安装座,所述蜗杆与所述蜗轮啮合,所述蜗杆至少有一端伸出至所述控制板外侧,所述蜗杆伸出至所述控制板外侧的一端固定连接有施力块。
20.通过采用上述技术方案,在施力块上施力使蜗杆转动,蜗杆带动蜗轮转动,从而带动连接轴转动,且转动完成后实现自锁。
21.可选的,所述转动块上设置有至少一个螺栓,所述螺栓沿所述连接轴的径向与所述转动块螺纹连接,所述螺栓远离螺帽的一端穿入所述连接轴、与所述连接轴螺纹连接。
22.通过采用上述技术方案,在将控制板安装到安装座上时,先将控制板上的转动块对准安装座上的转动座,然后将连接轴穿过转动块和转动座,把螺栓旋入转动块和连接轴中。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.控制板可以在竖直方向上调整高度以适应不同用户的使用习惯;
25.2.控制板可以绕水平的转动轴转动,以调整朝向,适应用户的使用需求。
附图说明
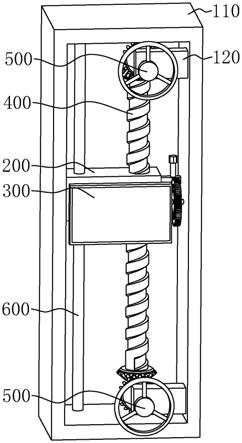
26.图1是本技术的门禁机整体结构示意图。
27.图2是本技术的螺杆结构示意图。
28.图3是本技术的驱动件结构示意图。
29.图4是本技术的转动件结构示意图。
30.图5是图4中的a部放大结构示意图。
31.附图标记:100、门禁机;110、安装框;120、安装块;200、安装座;300、控制板;400、螺杆;500、驱动件;510、手轮;520、第一锥齿轮;530、第二锥齿轮;600、限位杆;700、转动件;710、连接轴;711、定位块;720、转动块;721、定位槽;730、转动座;731、定位孔;740、螺栓;800、调节件;810、蜗轮;820、蜗杆;830、施力块。
具体实施方式
32.以下结合附图1
‑
5对本技术作进一步详细说明。
33.本技术实施例公开门禁消防智能联动系统,参照图1和图2,包括门禁机100、安装座200和用于激活门禁机100的控制板300,安装座200和控制板300均呈长方形,门禁机100上安装有螺杆400和用于驱动螺杆400转动的驱动件500,门禁机100上安装有安装框110,螺杆400和驱动件500均安装于安装框110内壁,安装座200沿竖直方向滑移安装于螺杆400上。
34.当用户欲通过门禁机100时,操作驱动件500,驱动件500驱动螺杆400转动,带动安装座200在竖直方向上滑移,待安装座200滑移到用户适应的高度后再操作控制板300激活门禁机100。
35.螺杆400轴向限位、周向转动安装于安装框110内,螺杆400沿竖直方向设置,螺杆400穿过安装座200、与安装座200螺纹连接,安装框110内安装有限位杆600,限位杆600沿竖直方向设置,限位杆600的两端分别与安装框110的顶面内壁与底面内壁固定连接,限位杆600位于螺杆400的一侧,安装座200套设于限位杆600上。
36.参照图2和图3,驱动件500包括手轮510、第一锥齿轮520和第二锥齿轮530,第一锥齿轮520同轴地固定连接于螺杆400的端部,安装框110的内壁上一体设置有安装块120,第二锥齿轮530的轴转动连接于安装块120上,第二锥齿轮530与第一锥齿轮520啮合,手轮510的轴穿过安装块120、与第二锥齿轮530的轴固定连接。
37.当需要调整控制板300的高度时,转动相应高度的手轮510,手轮510带动第二锥齿轮530转动,第二锥齿轮530带动第一锥齿轮520转动,从而带动螺杆400转动,由于螺杆400轴向限位、周向转动,安装座200周向限位、轴向滑移连接于所述螺杆400,因此螺杆400的周向转动带动安装座200沿螺杆400的长度方向滑移,待安装座200滑移至所需高度,停止转动手轮510。
38.由于不同的用户存在不同的身高,而驱动件500的高度固定设置,无法适配所有用户的身高,部分用户可能会对驱动件500的高度不适应,因此设置两个驱动件500,两驱动件500沿竖直方向间距设置,两驱动件500的高度分别适应身高较高与身高较低的用户的身高。
39.当身高相对较高的用户欲通过门禁机100时,操作位于上方的驱动件500,当身高相对较低的用户欲通过门禁机100时,操作位于下方的驱动件500。
40.参照图4,安装座200远离安装框110内壁的一面上设置有转动件700,控制板300通过转动件700转动安装于安装座200上,控制板300的转动轴水平设置,转动件700上安装有用于调节控制板300的转动角度并自锁的调节件800。操作调节件800,控制板300与安装座200之间的角度就可以进行调整,以适应人的使用习惯。
41.转动件700包括连接轴710、转动块720和两转动座730,转动块720固定连接于控制板300靠近安装座200的一面上,两转动座730均一体连接于安装座200靠近控制板300的一面上,两转动座730沿水平方向间距设置,连接轴710穿设于转动块720和两转动座730内,转动块720位于两转动座730间。
42.转动块720上设置有一个螺栓740,螺栓740沿连接轴710的径向与转动块720螺纹连接,螺栓740远离螺帽的一端穿过转动块720、穿入连接轴710,与连接轴710螺纹连接。
43.调节件800包括蜗轮810和蜗杆820,蜗轮810固定连接于连接轴710的一端,蜗杆820转动安装于安装座200,蜗杆820与蜗轮810啮合,蜗杆820的上端固定连接有截面呈多边形的施力块830。
44.当需要调整控制板300的朝向时,在施力块830上施力使蜗杆820转动,蜗杆820带动蜗轮810转动,从而带动连接轴710转动,且转动完成后实现自锁。
45.参照图5,连接轴710的中部一体设置有定位块711,靠近蜗轮810的转动座730上贯穿开设有供定位块711穿过的定位孔731,转动块720靠近蜗轮810的一面上开设有与定位块711相配合的定位槽721,定位孔731嵌于定位槽721内。
46.当穿设连接轴710时,定位块711穿过定位孔731嵌于定位槽721中,此时连接轴710上的螺栓孔与转动块720上的螺栓孔处于同轴位置,可直接将螺栓740旋入。
47.在另一较佳实施例中,安装框110上安装有用于保护螺杆400和驱动件500的外壳,外壳上沿竖直方向开设有供安装座200滑移的槽。
48.本技术实施例门禁消防智能联动系统的实施原理为:
49.在将控制板300安装到安装座200上时,先将控制板300上的转动块720对准安装座200上的转动座730,然后将连接轴710穿过转动块720和转动座730,使定位块711穿过定位孔731嵌于定位槽721中,再将螺栓740旋入转动块720和连接轴710的螺栓孔中。
50.当身高相对较高的用户欲通过门禁机100时,操作位于上方的驱动件500,驱动件500驱动螺杆400,带动安装座200在竖直方向上滑移,待安装座200滑移到相应高度后再操作控制板300激活门禁机100;当身高相对较低的用户欲通过门禁机100时,操作位于下方的驱动件500,驱动件500驱动螺杆400,带动安装座200在竖直方向上滑移,待安装座200滑移到相应高度后再操作控制板300激活门禁机100。
51.当需要调整控制板300的朝向时,通过调节件800调节连接轴710的转动角度,从而调节控制板300与安装座200间的角度,使控制板300的朝向更加贴合人的使用习惯,且调节完成后能够实现自锁。
52.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1