基于集成控制器的操控系统及工程机械的制作方法
1.本实用新型涉及智能远程控制领域,具体地涉及一种基于集成控制器的操控系统和一种工程机械。
背景技术:
2.现有的工程机械操控分为远程驾驶室操作、遥控操作和远程操作,其中远程驾驶室操作是最为常用的操作方式;遥控操作目前能达到的最大距离是2000m以内,且信号容易受到障碍物和天气等外部因素的影响。在某些危险的施工环境下,操作手在工作区域施工会有很大的危险性,甚至是根本无法进入施工区域;而遥控驾驶的有效范围过小,且很容易受到外部环境的干扰导致信号中断。
3.关于远程操作系统,现有技术中一般采用基于局域网的远程操控或者基于无线网络的远程操作;然而基于局域网的远程操控是在有线网络环境下才能实现,局限性很大;而且基于无线网络的远程操作,只是将局域网改成无线网络,为实现远程操作,原系统需要增加很多设备,导致生产调试都很困难。
技术实现要素:
4.本实用新型实施例的目的是提供一种基于集成控制器的操控系统和一种工程机械,主要解决工程机械操控远程操控系统集成度不高和操控不便的问题。
5.为了实现上述目的,本实用新型提供一种基于集成控制器的操控系统,所述操控系统包括:设备控制端和远程操作端;
6.所述设备控制端包括下端集成控制器,所述下端集成控制器用于获取并通过无线网络发送工程机械工作区域的视频信息;
7.所述远程操作端包括上端集成控制器和音影显示设备,所述上端集成控制器用于通过所述无线网络接收并发送接收到的所述工程机械工作区域的视频信息;
8.所述音影显示设备用于接收所述上端集成控制器发送的所述工程机械工作区域的视频信息进行显示。
9.可选的,所述下端集成控制器还用于获取并通过所述无线网络发送工程机械的工作参数和发动机运行数据;
10.所述上端集成控制器还用于通过所述无线网络接收并发送工程机械的工作参数和发动机运行数据;
11.所述音影显示设备还用于接收所述上端集成控制器发送的工程机械的工作参数和发动机运行数据并进行显示。
12.可选的,所述上端集成控制器还用于获取并通过所述无线网络发送工程机械的控制信号;
13.所述下端集成控制器还用于接收并根据所述控制信号控制工程车辆进行对应的动作。
14.可选的,所述下端集成控制器还用于响应于接收到的手动控制切换信号,获取手动控制信号,并根据所述手动控制信号控制工程车辆进行对应的动作。
15.可选的,所述操控系统还包括先导油源回路,所述先导油源回路用于提供液压先导控制液压压力;
16.所述下端集成控制器还用于响应于急停信号或第一急停触发信号,控制所述先导油源回路停止提供液压先导控制液压压力。
17.可选的,所述上端集成控制器还用于响应于接收到的第二急停触发信号,生成并通过所述无线网络发送所述急停信号至所述下端集成控制器。
18.可选的,所述操控系统还包括视频采集装置,所述视频采集装置用于采集所述工作区域的视频信息并通过有线网络传输至所述下端集成控制器。
19.可选的,所述视频采集装置包括摄像头系统和硬盘录像机;
20.所述视频采集装置通过所述摄像头系统采集所述工作区域的视频信息;
21.所述硬盘录像机用于接收所述工作区域的视频信息并通过有线网络传输至所述下端集成控制器。
22.可选的,所述操控系统还包括变焦操作器和远程驾驶室,所变焦操作器和所述音影显示设备设置于所述远程驾驶室;所述变焦操作器用于产生变焦信号;
23.所述上端集成控制器还用于获取所述变焦信号并通过所述无线网络发送至所述下端集成控制器;所述下端集成控制器通过所述硬盘录像机将所述变焦信号传输至所述摄像头系统;
24.所述摄像头系统根据所述变焦信号执行相应的变焦操作。
25.可选的,所述摄像头系统包括摄像头和摄像头云台系统;所述上端集成控制器还用于获取所述变焦信号并通过所述无线网络发送至所述下端集成控制器;所述下端集成控制器通过所述硬盘录像机将所述变焦信号传输至所述摄像头云台系统;
26.所述摄像头云台系统根据所述变焦信号控制所述摄像头执行相应的变焦操作。
27.可选的,所述下端集成控制器通过通信加密发送工程机械的工作参数、发动机运行数据和工作区域的视频信息。
28.本实用新型还提供一种工程机械,所述工程机械包括上述的基于集成控制器的操控系统。
29.通过上述技术方案,下端集成控制器集成了工程机械专用控制器功能和无线通信的功能,通过获取并通过无线网络发送工程机械的工作参数、发动机运行数据和工作区域的视频信息;上端集成控制器集成了无线通信功能、操作信号采集控制器的功能和信号发生器功能,通过所述无线网络接收并发送接收到的所述工程机械的工作参数和所述发动机运行数据与所述工作区域的视频信息;通过下端集成控制器和上端集成控制器的功能集成减少部件,节约成本,提高可靠性;
30.同时在集成的下端集成控制器和上端集成控制器的通信配合下,音影显示设备用于接收所述上端集成控制器发送的所述工程机械的工作参数和所述发动机运行数据与所述视频信息并进行叠加处理后进行显示,使操作手更直观得了解设备控制端的工作情况,便于远程操作工程机械。
31.本实用新型实施例的其它特征和优点将在随后的具体实施方式部分予以详细说
明。
附图说明
32.附图是用来提供对本实用新型实施例的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本实用新型实施例,但并不构成对本实用新型实施例的限制。在附图中:
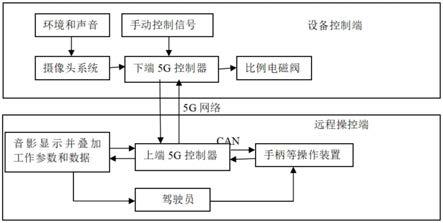
33.图1是本实用新型实施例提供的一种基于集成控制器的操控系统示意图。
具体实施方式
34.以下结合附图对本实用新型实施例的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本实用新型实施例,并不用于限制本实用新型实施例。
35.在本实用新型实施例中,在未作相反说明的情况下,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
36.实施例1
37.本实施例提供一种基于集成控制器的操控系统,如图1所示,所述操控系统包括:设备控制端和远程操作端;所述集成控制器优选于5g控制器。
38.所述设备控制端包括下端5g控制器,下端5g控制器优选的,将5g信号源、信号接收器和工程机械专用控制器的功能集成于下端5g控制器;下端5g控制器可以通过can等有线网络连接工程机械上设置的用于检测回转支撑的旋转角度的角度传感等获取到工程机械的工作参数,以及通过连接到发动机的ecu读取发动机的运行数据,其中包括发动机转速和发动机输出功率等运行参数;可选的,所述操控系统还包括视频采集装置;下端5g控制器通过有线网络从所述视频采集装置获取采集到的工作区域的视频信息。由于工程机械施工现场的环境复杂,wifi信号等近距离无线通信可能并不稳定,具体的,下端5g控制器可以通过网线直接连接视频采集装置提供网络,进一步的,下端5g控制器通过5g信号源产生的5g网络发送获取到的工程机械的工作参数、发动机运行数据和工作区域的视频信息。
39.所述远程操作端包括上端5g控制器和音影显示设备,上端5g控制器中集成了5g信号源+操作信号采集控制器+vpn+路由器+信号发生器的功能,所述上端5g控制器用于通过所述5g网络接收并发送接收到的所述工程机械的工作参数和所述发动机运行数据与所述工作区域的视频信息;其中,上端5g控制器中的操作信号采集控制器通过线束和can总线接收手柄、操作杆、钥匙开关、油门传来的控制信号;上端5g控制器中的5g信号源、信号发生器,以及下端5g控制器中的5g信号源、信号接收器等现有模块实现现有的5g通信。上端5g控制器和下端5g控制器之间的数据还可以通过vpn单元进行加密后进行通信传输。
40.所述音影显示设备用于接收所述上端5g控制器发送的所述工程机械的工作参数和/或所述发动机运行数据/或所述视频信息并进行显示;工作参数、发动机运行数据和视频信息三种数据优选通过叠加处理后进行显示。这样使得工程机械的工作参数和发动机运行数据与监控视频画面相叠加,使操作手更直观得了解本机工作情况。远程操作端的网络
环境相对固定,音影显示设备优选的,通过上端5g控制器中路由器中wifi单元进行数据传输。
41.可选的,所述视频采集装置包括摄像头系统和硬盘录像机;所述视频采集装置通过所述摄像头系统采集所述工作区域的视频信息;所述硬盘录像机用于接收所述工作区域的视频信息并通过有线网络传输至所述下端5g控制器。硬盘录像机通过网线连接摄像头系统,将采集的工作区域的视频信息进行收集,然后通过网线传至下端5g控制器。
42.可选的,所述操控系统还包括变焦操作器和远程驾驶室,所变焦操作器和所述音影显示设备设置于所述远程驾驶室;所述变焦操作器用于产生变焦信号。优选的,本实施例中,变焦操作器可以设置为远程操控端的座椅手柄按钮;操作人员在远程驾驶室中,可以根据音影显示设备(如电视墙)的实时显示功能,在要对工作位置进行精确操作时,可通过操作变焦操作器,利用带高倍变焦的摄像头系统放大视频信息并自动聚焦到工作范围,实现精确操作。所述上端5g控制器还用于获取所述变焦信号并通过所述5g网络发送至所述下端5g控制器;所述下端5g控制器通过所述硬盘录像机将所述变焦信号传输至所述摄像头系统;所述摄像头系统根据所述变焦信号执行相应的变焦操作。具体的,所述摄像头系统包括摄像头和摄像头云台系统;所述上端5g控制器还用于获取所述变焦信号并通过所述5g网络发送至所述下端5g控制器;所述下端5g控制器通过所述硬盘录像机将所述变焦信号传输至所述摄像头云台系统;所述摄像头云台系统根据所述变焦信号控制所述摄像头执行相应的变焦操作。所述摄像头系统中设置的全景摄像头个数优选为1个,自动变焦的摄像头的个数为5个;摄像头系统采集的工作区域的视频信息包括工程机械的动作区域情况视屏信息和动作区域周围区域的所处环境视频信息;其中1
‑
4号自动变焦的摄像头监视工程机械的前后左右方向;5号自动变焦的摄像头监控机器的工作区域,即斗杆和铲斗所工作的动作区域,这个区域需要非常精确的监控效果,因此选择高清自动变焦的摄像头,为了操作方便,摄像头的变焦功能集成在远程驾驶室座椅的手柄按钮上,操作手可以边操作边进行变焦工作。在要对工作位置进行精确操作时,通过带高倍变焦的摄像头放大并自动聚焦到工作范围,可实现精确操作。变焦摄像头的变焦通过手柄按钮信号经上端和下端5g控制器与摄像头云台系统对接实现,使变焦和操作可同时进行,方便且不影响操作效率。
43.6号摄像头为全景摄像头,安装在车辆外对挖掘机进行全景的监控。当然,音影显示设备可以选择六块显示屏,在远程远程驾驶室座椅组成了监控电视墙分别对应显示6个摄像头的采集画面实现方位监控。
44.可选的,上端5g控制器还用于获取并通过所述5g网络发送工程机械的控制信号;远程操作端设置于远程驾驶室内,远程驾驶室内设置有左右操作手柄、左右踏板等产生电信号的操作装置,这两个操作装置是通过can总线通讯对应的线束连接上端5g控制器;线束是为远程驾驶室座椅提供操作装置到上端5g控制器的可靠信号传递。线束一段接在操作装置上,另一端接入上端5g控制器接收信号。下端5g控制器还用于接收并根据所述控制信号控制工程车辆进行对应的动作。其中,下端5g控制器与工程机械如挖掘机本身的预设控制信息相结合,输出开关量信号控制工程机械的点火熄火、先导等动作;输出pwm信号控制挖掘机中对应的比例电磁阀等执行元件来控制行走、上车回转、动臂、斗杆和铲斗的动作;输出can总线信号控制发动机的转速等。因此远程操作系统,使操作手远离恶劣的工作环境以及现场声光等外在因素的影响,保障操作手的人身安全。
45.可选的,所述下端5g控制器还用于响应于接收到的手动控制切换信号,获取手动控制信号,并根据所述手动控制信号控制工程车辆进行对应的动作。下端5g控制器包括5g信号源、信号接收器和工程机械专用控制器;产生手动控制信号的按钮可以设置在工程机械端,也可以设置在远程操作端;这样方便对工程机械控制模式的切换和选择。
46.可选的,所述下端5g控制器通过通信加密发送工程机械的工作参数、发动机运行数据和工作区域的视频信息。上端5g控制器和下端5g控制器均包括vpn模块,下端5g控制器中的vpn模块设置为无成路由器功能,下端5g控制器所在的施工环境,wifi信号可能并不稳定,可以减少相应的功耗。上端5g控制器和下端5g控制器之间的通信通过vpn进行加密传输;上端5g控制器通过wifi模块将接收到工程机械的工作参数、发动机运行数据和工作区域的视频信息传输至音影显示设备中的视频解密模块,视频解密模块从wifi中获取视频信号,再将这些信号分配到六块显示屏上,实现方位监控。这样的设计适合工程机械的教学工作,避免多人在施工现场时发生危险,可以一人操作多人观看和学习。
47.可选的,所述操控系统还包括先导油源回路,所述先导油源回路用于向工程机械提供液压先导控制液压压力;所述下端5g控制器还用于响应于急停信号或第一急停触发信号,控制所述先导油源回路停止提供液压先导控制液压压力。在工程机械上配置遥控钥匙,用于产生第一急停触发信号,可以直接关断工程机械的先导油源回路的先导开关。
48.可选的,所述上端5g控制器还用于响应于接收到的第二急停触发信号,生成并通过所述5g网络发送所述急停信号至所述下端5g控制器。远程操控端可以设置遥控钥匙产生第二急停触发信号,以避免在工程机械发生失控的情况,而现场又有人在的情况下,远距离关断工程机械的先导油源回路,强行停止机器动作。这个先导开关直接串联在机器的先导回路里,可以直接关闭先导,不与其他任何元器件关联。在机器发生失控时,也保证了现场处理人员的人身安全。
49.本实用新型还提供一种工程机械,所述工程机械包括上述的基于5g控制器的操控系统。基于5g控制器的操控系统将传统的提供无线网络的5g模块变为一个集提供网络、采集信号、策略控制、输出控制为一体的模块。相对与传统远程操作的工程机械,具有很多的优势减少了许多新增的单独设备,如减少了传统工程机械端需要增加的控制器、信号接收器、cpe、路由器、vpn(使工程机械和操作室端的网络元件能互相访问的设备)等;如减少了传统工程的操作室端增加的cpe、操作信号采集设备、路由器、vpn、信号发生器等。本实施例中的工程机械实现量产,减少了众多独立设备增加的成本,减少了生产调试的难度和故障点,进一步的对于非常紧凑的小型挖机等工程机械,便于安装。
50.以上结合附图详细描述了本实用新型实施例的可选实施方式,但是,本实用新型实施例并不限于上述实施方式中的具体细节,在本实用新型实施例的技术构思范围内,可以对本实用新型实施例的技术方案进行多种简单变型,这些简单变型均属于本实用新型实施例的保护范围。
51.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本实用新型实施例对各种可能的组合方式不再另行说明。
52.此外,本实用新型实施例的各种不同的实施方式之间也可以进行任意组合,只要其不违背本实用新型实施例的思想,其同样应当视为本实用新型实施例所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1