一种具有防盗功能的卡机设备的制作方法
1.本实用新型涉及人体检测技术领域,具体涉及一种具有防盗功能的卡机设备。
背景技术:
2.随着人脸识别考勤门禁技术得到广泛的应用,人脸卡机安全保护应用的场景也越来越多,大到国家级的档案室人脸识别门禁,人脸识别安防系统,小到公司日常的刷脸考勤机,用于人脸卡机的安全保护的防盗装置需求量越来越多。
3.现有的卡机安全保护技术在进行卡机的防拆保护的时候大多采用加速度计通过检测移动方向上的加速度变化或者通过摄像头实时监测并实时上传到手机上等单一方式进行防盗保护,防盗效果较差。比如,采用加速计的方式,由于加速度计对方向加速度的变化特别敏感,存在加速计失灵或者误触发造成误识别的风险;采用摄像头监测方式由于视频格式数据量大,则存在实时监测数据传输量大,易造成系统死机的问题,另外还存在被人员从外部切断电源造成保护装置失效的风险,从而造成安全隐患。
技术实现要素:
4.本实用新型的目的在于克服上述技术不足,提供一种具有防盗功能的卡机设备,以解决相关技术防盗效果较差的技术问题。
5.为达到上述技术目的,本实用新型采取了以下技术方案:
6.根据本实用新型,提供了一种具有防盗功能的卡机设备,包括:
7.卡机设备本体;
8.红外测距装置,设置于所述卡机设备本体上,用于检测人体距离所述卡机设备本体的距离;
9.陀螺仪,设置于所述卡机设备本体上,用于检测所述卡机设备本体的角速率。
10.可选的,所述红外测距装置包括:
11.多个红外发射模块,用于发射红外线;
12.多个红外接收模块,与所述多个红外发射模块一一对应设置,用于接收人体反射的红外线。
13.可选的,所述卡机设备本体包括屏幕;所述红外发射模块和所述红外接收模块分布在所述屏幕四周。
14.可选的,一个红外发射模块和一个红外接收模块组成一个红外发射-接收组,每个红外发射-接收组中的红外发射模块和红外接收模块在所述屏幕的一侧邻近设置。
15.可选的,多个所述红外发射-接收组在所述屏幕四周均匀分布。
16.可选的,所述陀螺仪设置于靠近所述卡机设备本体中心的位置。
17.可选的,所述卡机设备本体设置有主控芯片,所述主控芯片与所述红外发射模块通过脉冲宽度调制pmw接口连接,所述主控芯片与所述红外接收模块通过信号接收rx接口连接。
18.可选的,所述卡机设备本体还设置有印制电路板,所述主控芯片设置于所述印制电路板上,所述印制电路板放置方向与所述卡机设备本体的安装墙面平行。
19.可选的,所述主控芯片设置于所述印制电路板的正中央,所述陀螺仪设置于所述主控芯片附近。
20.可选的,还包括:报警装置,用于输出报警信息。
21.本实用新型提供的具有防盗功能的卡机设备,包括:卡机设备本体;红外测距装置,设置于所述卡机设备本体上,用于检测人体距离所述卡机设备本体的距离;陀螺仪,设置于所述卡机设备本体上,用于检测所述卡机设备本体的角速率。通过红外测距和陀螺仪配合实现了更好的安全防盗效果,同时采用的红外测距成本低,节省了成本。
附图说明
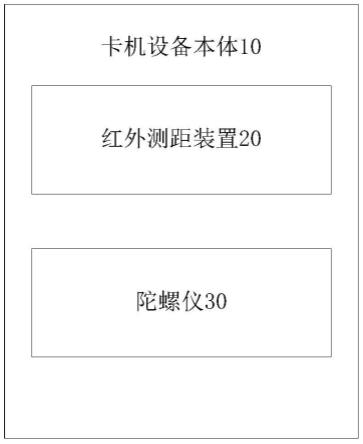
22.图1是本实用新型实施例提供的一种具有防盗功能的卡机设备的示意图;
23.图2是本实用新型实施例提供的另一种具有防盗功能的卡机设备的示意图;
24.图3是本实用新型实施例提供的一种具有防盗功能的卡机设备的防盗流程示意图;
25.图4是本实用新型实施例提供的一种具有防盗功能的卡机设备的防盗流程示意图。
具体实施方式
26.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
27.根据本实用新型实施例,提供了一种具有防盗功能的卡机设备。请参阅图1,该具有防盗功能的卡机设备可以包括:
28.卡机设备本体10;
29.红外测距装置20,设置于所述卡机设备本体上,用于检测人体距离所述卡机设备本体的距离;
30.陀螺仪30,设置于所述卡机设备本体上,用于检测所述卡机设备本体的角速率。
31.可选的,所述红外测距装置包括:
32.多个红外发射模块,用于发射红外线;
33.多个红外接收模块,与所述多个红外发射模块一一对应设置,用于接收人体反射的红外线。
34.可选的,红外发射模块可以是红外二极管,红外接收模块可以是红外二极管对应的红外接收头。或者,可选的,也可以是红外感应模组,红外感应模组安装方便,同样可以感应人体的位置变化信息,并转化为相应的电压信号。再或者,也可以采用红外发射对管的方式来感应人体位置的变化,从而得到变化的电压信号来进行红外测距。
35.可选的,所述卡机设备本体包括屏幕;所述红外发射模块和所述红外接收模块分布在所述屏幕四周。
36.可选的,一个红外发射模块和一个红外接收模块组成一个红外发射-接收组,每个
红外发射-接收组中的红外发射模块和红外接收模块在所述屏幕的一侧邻近设置。
37.可选的,多个所述红外发射-接收组在所述屏幕四周均匀分布。
38.可选的,卡机设备屏幕截面为方形,对应方形每个侧边的位置设置一个红外发射-接收组。
39.可选的,红外发射-接收组分布在屏幕的上侧、左侧和右侧。
40.可选的,所述陀螺仪设置于靠近所述卡机设备本体中心的位置。
41.可选的,所述卡机设备本体设置有主控芯片,所述主控芯片与所述红外发射模块通过脉冲宽度调制pmw接口连接,所述主控芯片与所述红外接收模块通过信号接收rx接口连接。
42.可选的,所述卡机设备本体还设置有印制电路板,所述主控芯片设置于所述印制电路板上,所述印制电路板放置方向与所述卡机设备本体的安装墙面平行。
43.可选的,所述主控芯片设置于所述印制电路板的正中央,所述陀螺仪设置于所述主控芯片附近。
44.可选的,所述陀螺仪与所述主控芯片连接。
45.可选的,还包括:报警装置,用于输出报警信息。
46.可选的,报警信息可以包括声音、光、文字等任意形式的报警信息。相应的,报警装置可以是喇叭、指示灯、屏幕等。
47.可选的,报警装置还可以是卡机设备本体关联的手机、电脑等终端。
48.本实用新型提供的具有防盗功能的卡机设备,包括:卡机设备本体;红外测距装置,设置于所述卡机设备本体上,用于检测人体距离所述卡机设备本体的距离;陀螺仪,设置于所述卡机设备本体上,用于检测所述卡机设备本体的角速率。通过红外测距和陀螺仪配合实现了更好的安全防盗效果,同时采用的红外测距成本低,节省了成本。
49.图2是本实用新型实施例提供的另一种具有防盗功能的卡机设备的示意图,如图2所示,该设备包括:
50.人脸卡机,即卡机设备本体10的一种可选实施例;
51.红外发射二极管hmira55t和红外接收头snm437,即红外测距装置20的一种可选实施例,设置于所述卡机设备本体上,用于检测人体距离所述卡机设备本体的距离;
52.加速度传感器lsm6ds3tr,即陀螺仪30的一种可选方式。
53.需要说明的是,上述红外发射二极管、红外接收头、加速度传感器型号仅为优选型号,本技术包括但不限于此。
54.本实施例提供的具有防盗功能的卡机设备,包括:人脸卡机;红外发射二极管hmira55t和红外接收头snm437;加速度传感器lsm6ds3tr。通过红外测距和陀螺仪配合实现了更好的安全防盗效果,同时采用的红外测距成本低,节省了成本。
55.图3是本实用新型实施例提供的一种具有防盗功能的卡机设备的防盗流程示意图,如图3所示,该方法适用于图1或2所示的具有防盗功能的卡机设备。该方法包括:
56.1、获取人员靠近方向信息以及靠近方向的距离坐标。具体的,在人脸卡机的四周安装红外发射接收装置,在卡机设备外壳正面屏幕上方、屏幕的左侧和右侧设置多路红外发射接收装置,用于采集人员距离卡机的实时方向和距离信息,通过红外发射接收装置判断人员方向和距离的实时变化。
57.3、判断人员靠近是否存在异常:判断当前的人员接近卡机的方向和距离是否是否有超出设定的阈值。
58.4、在人员靠近存在异常时,启动陀螺仪进行角度姿态判断。具体的,当通过红外装置检测到人员接近的方向和距离都处于异常状态,开始启动陀螺仪监测卡机的固定位置是否发生变化,对角速率持续监测。在红外装置检测到人员接近的方向和距离未处于异常状态的情况下,正常进行人脸识别。
59.5、根据角速率的监测情况,判断是否需要启动报警。具体的,判断当前卡机是否存在被盗的风险,在存在风险时,发出报警提示。
60.本实施例可以解决由于传感器精度问题带来的误识别,同时这种方式所采用的红外发射接收装置成本低,可以节约成本。
61.继续参考图2,可选的,一个红外发射二极管hmira55t和一个红外接收头snm437组成一个红外发射-接收组,人脸卡机正面设置有屏幕,人脸卡机侧面均匀设置有红外发射-接收组。加速度传感器lsm6ds3tr设置于人脸卡机靠近中央的位置。
62.继续参考图2,可选的,人脸卡机内的pcb电路板放置方向与安装墙面平行,加速度传感器lsm6ds3tr贴装在主控芯片r818附近,距离主控芯片5mm左右的距离,主控芯片贴装在电路板正中央,主控芯片通过i2c接口或四路串行外设接口spi高速接口与加速度传感器lsm6ds3tr建立通信,当卡机正常安装在墙面之后,卡机的位置和方向也就随之固定住了,不会轻易发生改变,这个时候陀螺仪在其三个方向轴上(x轴、y轴、z轴)上可检测到的加速度方向和可检测的角速率方向也就固定,不会发生改变。加速度传感器lsm6ds3tr将此刻检测到的加速度方向和角速率方向信息通过i2c通讯接口建立的通讯协议发送给主控芯片r818。
63.如图4所示,提供了一种具有防盗功能的卡机设备的人员检测流程示意图,该方法适用于图1或2所示的卡机设备,该方法具体可以包括:
64.步骤一、红外发射二极管通过输入/输出i/o口接收信号。具体的,人脸卡机设置的主控芯片r818,与红外发射二极管hmira55t通过主控的pwm口(i/o口)连接,主控芯片r818与红外接收头snm437通过主控的rx口(i/o口)进行连接,主控芯片r818通过脉冲宽度调制pwm口持续发射一定频率的脉冲信号给红外发射二极管。
65.步骤二、红外发射二极管发射固定频率的脉冲信号,其中,红外发射二极管接收到主控芯片发送来的信号,并将其转化为红外接收头可识别的红外信号进行发送。
66.步骤三、通过红外接收头接收到的红外信号判断人员靠近卡机的方向。其中,当红外检测到人员从正面靠近卡机,人员反射红外发射信号到正面接收头;如果任何方向都没有人员靠近卡机,则卡机处于屏保界面,不出发报警;当红外检测到人员从侧面靠近卡机,人员反射红外信号到侧面接收头。
67.其中,在红外检测到人员从正面靠近卡机,人员反射红外发射信号到正面接收头的情况下,该方法还可以包括以下步骤:
68.步骤1:红外接收头接收到反射回来的红外信号。具体的,主控芯片通过pwm口持续发射一定频率的脉冲信号给红外发射二极管,红外发射二极管接收到信号并将此信号转化为红外接收头可识别的红外信号;红外接收头接收到反射回来的红外信号。也即,当人员从前面或者侧面靠近卡机,就会被前置的红外发射装置检测到,并通过红外信号反射回到接
收头snm437。
69.步骤2:主控芯片通过s=1/2vt计算人员到卡机的实际距离s1。具体的,接收头将接收到的红外信号传递给主控芯片,主控芯片利用红外测距的原理测量卡机前人员的水平距离s,这样就可以得到一个人员的水平位置坐标信息s1。其中,一般卡机会在屏幕打卡界面设置一个图像框,用于矫正人员打卡距离d1(人站立在卡机前面到卡机的水平距离),人员只有将脸的边缘与图像框进行对齐,才能进行人脸打卡操作,如果要强制拆卸卡机,人员一定要靠近卡机,则此时到卡机的距离一定小于d1,侧面人员到卡机的水平距离也会存在一个安全阈值d2。
70.步骤3:间隔0.5s,主控芯片通过s=1/2vt计算人员得到卡机的实际距离s2。具体的,当位于屏幕上方和侧面的红外发射二极管和红外接收头第一次检测到有人员靠近卡机,并测得距离坐标为s1时,间隔0.5s位于正面的红外发射二极管再次进行红外测距检测,得到人员的距离坐标信息s2。
71.步骤4:再间隔0.5s,主控芯片通过s=1/2vt计算人员到卡机的实际距离s3。具体的,位于正面的红外发射二极管继续发射固定频率的脉冲信号,红外接收头将接收到的红外信号转化为芯片能识别到的电信号,主控芯片r818利用红外测距原理计算得到此刻的人员位置坐标信息s3。
72.步骤5:计算三次测距的平均值&s1=(s1+s2+s3)/3,并判断其是否在设定阈值d1之内,即&s1《d1。具体的,计算三次等间隔时间测距的平均值作为最终的人员距离位置坐标,利用平均值计算公式可得三次测距的平均值&s1=(s1+s2+s3)/3,将红外测距得到的最终的人员距离位置坐标与主控芯片r818设定的卡机正面距离d1进行比较,如果&s1《d1则说明当前人员距离卡机的位置距离处于一个过近的异常状态,但是不排除是由于人员进行打卡操作的时候不小心站的位置距离卡机过近,所以此时继续进行步骤一至步骤五的人员距离位置获取和判断。
73.步骤6:循环三次进行步骤一至步骤五的人员距离位置获取和判断。如果此时得到的三次测距平均值均&s1《d1,则可判定人员距离位置坐标过近,小于设定的阈值d1。
74.步骤7:用主控芯片内置计时器进行计时,判断人员停留时间是否在时间阈值范围内(人员停留卡机时间不宜过长,过长判断为人员异常靠近)。
75.步骤8:基于人员停留时间在时间阈值范围内,则确定人员靠近为异常靠近,启动陀螺仪进行姿态角度判断。
76.步骤9:判定卡机此时姿态角度&2大于系统设定阈值&1。
77.其中,当此时有人员从卡机屏幕前方或侧面接近卡机之后,对卡机进行暴力强行拆卸,此时由于卡机的固定安装位置发生了变化,所以内置的陀螺仪lsm6ds3tr也会随着卡机安装位置的改变而触发陀螺仪的姿态角度(加速度和角速率)检测,通过主控r818会设置一个正常的姿态角度的阈值范围&1。如果陀螺仪检测到的的姿态角度在阈值&1范围之内,则不会触发陀螺仪lsm6ds3tr响应;如果安装在室外由于风等不可抗力因素引起的卡机位置改变进而导致的陀螺仪姿态角度的改变&2《&1则此时陀螺仪不会上报姿态角度信息给主控芯片r818;如果是人员强行进行的暴力拆卸,则陀螺仪检测到的姿势角度&2》&1,此时陀螺仪将检测到的异常的姿态角度信息通过通讯协议发送给主控芯片r818。
78.步骤10:通过wi-fi将报警信号传输到手机服务器。
79.其中,主控芯片将通过存储卡sdmmc的wifi通讯接口向服务器进行上报,wifi模组wf-r189-ssh1将信号传递给手机服务器端,从而触发报警。可选的,卡机红色rgb指示灯常亮,用于警示作用。
80.步骤11:手机服务器接收到信号发出报警提示。
81.其中,在红外检测到人员从侧面靠近卡机,人员反射红外信号到侧面接收头的情况下,该方法还可以包括以下步骤:
82.步骤1:红外接收头接收到反射回来的红外信号。具体的,主控芯片通过pwm口持续发射一定频率的脉冲信号给红外发射二极管,红外发射二极管接收到信号并将此信号转化为红外接收头可识别的红外信号;红外接收头接收到反射回来的红外信号。也即,当人员从前面或者侧面靠近卡机,就会被前置的红外发射装置检测到,并通过红外信号反射回到接收头snm437。
83.步骤2:主控芯片通过s=1/2vt计算人员到卡机的实际距离s1。具体的,接收头将接收到的红外信号传递给主控芯片,主控芯片利用红外测距的原理测量卡机前人员的水平距离s,这样就可以得到一个人员的水平位置坐标信息s1。其中,一般卡机会在屏幕打卡界面设置一个图像框,用于矫正人员打卡距离d1(人站立在卡机前面到卡机的水平距离),人员只有将脸的边缘与图像框进行对齐,才能进行人脸打卡操作,如果要强制拆卸卡机,人员一定要靠近卡机,则此时到卡机的距离一定小于d1,侧面人员到卡机的水平距离也会存在一个安全阈值d2。
84.步骤3:间隔0.5s,主控芯片通过s=1/2vt计算人员得到卡机的实际距离s2。具体的,当位于屏幕上方和侧面的红外发射二极管和红外接收头第一次检测到有人员靠近卡机,并测得距离坐标为s1时,间隔0.5s位于正面的红外发射二极管再次进行红外测距检测,得到人员的距离坐标信息s2。
85.步骤4:再间隔0.5s,主控芯片通过s=1/2vt计算人员到卡机的实际距离s3。具体的,位于正面的红外发射二极管继续发射固定频率的脉冲信号,红外接收头将接收到的红外信号转化为芯片能识别到的电信号,主控芯片r818利用红外测距原理计算得到此刻的人员位置坐标信息s3。
86.步骤5:计算三次测距的平均值&s2=(s1+s2+s3)/3,并判断其是否在设定阈值d2之内,即&s2《d2。具体的,计算三次等间隔时间测距的平均值作为最终的人员距离位置坐标,利用平均值计算公式可得三次测距的平均值&s2=(s1+s2+s3)/3,将红外测距得到的最终的人员距离位置坐标与主控芯片r818设定的卡机正面距离d2进行比较,如果&s2《d2则说明当前人员距离卡机的位置距离处于一个过近的异常状态,但是不排除是由于人员进行打卡操作的时候不小心站的位置距离卡机过近,所以此时继续进行步骤一至步骤五的人员距离位置获取和判断。
87.步骤6:循环三次进行步骤一至步骤五的人员距离位置获取和判断。如果此时得到的三次测距平均值均&s2《d2,则可判定人员距离位置坐标过近,小于设定的阈值d2。
88.步骤7:用主控芯片内置计时器进行计时,判断人员停留时间是否在时间阈值范围内(人员停留卡机时间不宜过长,过长判断为人员异常靠近)。
89.步骤8:基于人员停留时间在时间阈值范围内,则确定人员靠近为异常靠近,启动陀螺仪进行姿态角度判断。
90.步骤9:判定卡机此时姿态角度&4大于系统设定阈值&3。
91.其中,当此时有人员从卡机屏幕前方或侧面接近卡机之后,对卡机进行暴力强行拆卸,此时由于卡机的固定安装位置发生了变化,所以内置的陀螺仪lsm6ds3tr也会随着卡机安装位置的改变而触发陀螺仪的姿态角度(加速度和角速率)检测,通过主控r818会设置一个正常的姿态角度的阈值范围&3。如果陀螺仪检测到的的姿态角度在阈值&3范围之内,则不会触发陀螺仪lsm6ds3tr响应;如果安装在室外由于风等不可抗力因素引起的卡机位置改变进而导致的陀螺仪姿态角度的改变&4《&3则此时陀螺仪不会上报姿态角度信息给主控芯片r818;如果是人员强行进行的暴力拆卸,则陀螺仪检测到的姿势角度&4》&3,此时陀螺仪将检测到的异常的姿态角度信息通过通讯协议发送给主控芯片r818。
92.步骤10:通过wi-fi将报警信号传输到手机服务器。
93.其中,主控芯片将通过存储卡sdmmc的wifi通讯接口向服务器进行上报,wifi模组wf-r189-ssh1将信号传递给手机服务器端,从而触发报警。可选的,卡机红色rgb指示灯常亮,用于警示作用。
94.步骤11:手机服务器接收到信号发出报警提示。
95.本实施例中,考虑到市面的人脸卡机一般进行防盗保护只是采用单一的加速度计或陀螺仪来进行防盗安全保护,如果人员采用特殊方式切断卡机电源则会导致造成卡机无法对暴力拆卸卡机进行报警,存在很大的安全隐患。本实施例采用红外测距感应和陀螺仪加速度和角速率方向检测相结合的方式来进行安全检测,可以在异常靠近时就发出报警,大大降低了采用切断电源方式带来的安全隐患,红外测距技术目前应用较为广泛,而且由于所采用的红外发射接收装置价格低廉,和市面上采用的多传感器检测方式相比,具有非常大的成本优势。
96.以上所述本实用新型的具体实施方式,并不构成对本实用新型保护范围的限定。任何根据本实用新型的技术构思所做出的各种其他相应的改变与变形,均应包含在本实用新型权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1