工业场景的远程巡检方法、系统及装置、设备及存储介质与流程
本发明涉及巡检,尤其涉及一种工业场景的远程巡检方法、系统及装置、设备及存储介质。
背景技术:
1、在现代科技学术不断发展的今天,人工智能是当前很多科研工作者研究的主要内容,人工智能由于其自动化程度高,也逐渐的融入在人们的日常生活中。复杂工业现场的设备与管道很多,不适宜工人长期驻守。因此,可以借助人工智能的高程度自动化,来提高复杂工业现场的自动化程度,以此减少工业现场人员的投入。
2、但是,现有人工智能的场景分类仅仅囊括了海洋、山脉、森林、街道、建筑物等在内的生活场景,而对于复杂工业场景上的研究与应用至今还是空白。
3、因此,如何利用人工智能提高复杂工业场景上的自动化程度是需要解决的问题。
技术实现思路
1、本发明的主要目的在于提供一种工业场景的远程巡检方法、系统及装置、设备及存储介质,可以解决现有技术中缺少提高复杂工业场景上的自动化程度的问题。
2、为实现上述目的,本发明第一方面提供一种工业场景的远程巡检方法,所述方法应用于工业场景的远程巡检系统,所述方法包括:
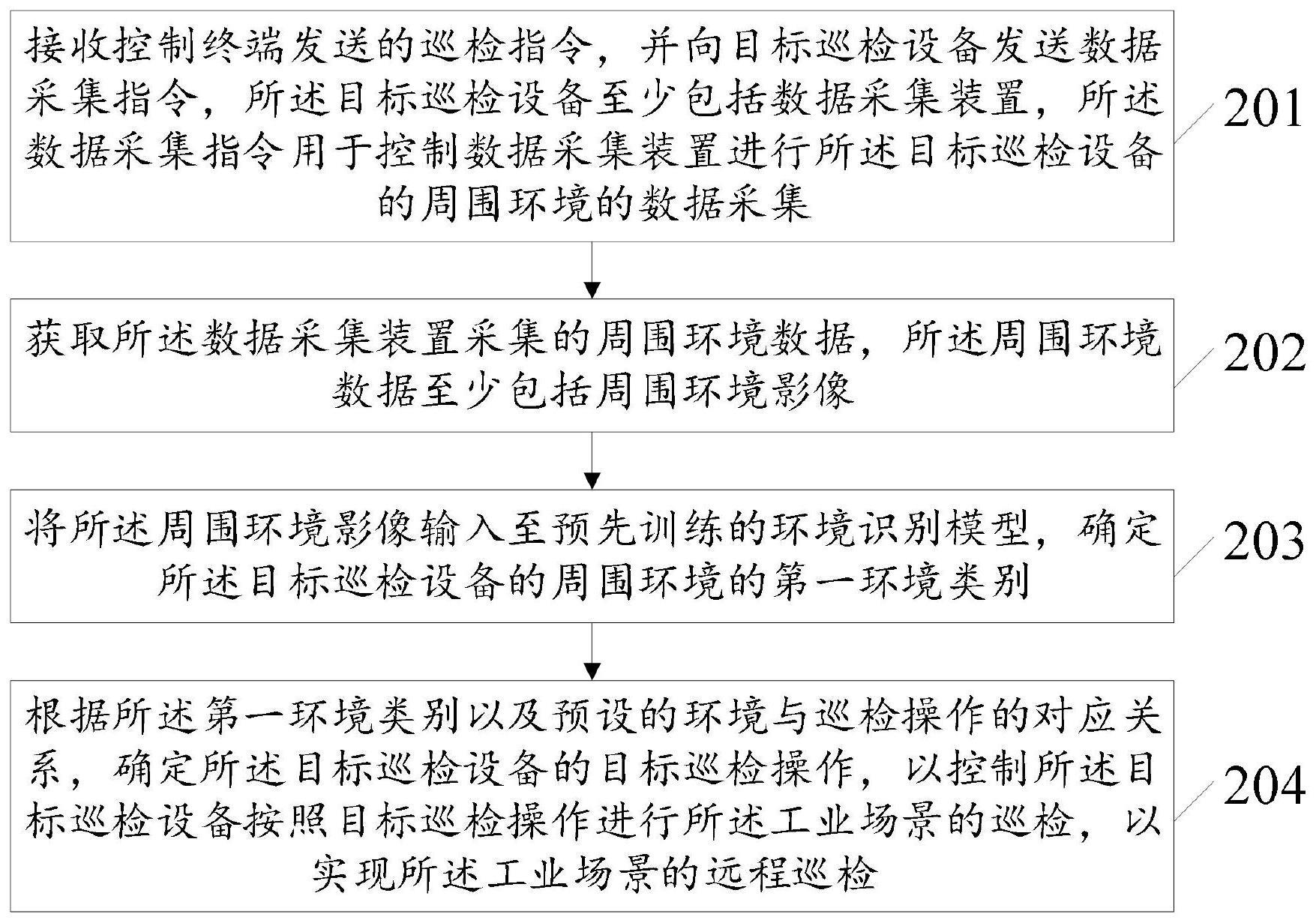
3、接收控制终端发送的巡检指令,并向目标巡检设备发送数据采集指令,所述目标巡检设备至少包括数据采集装置,所述数据采集指令用于控制数据采集装置进行所述目标巡检设备的周围环境的数据采集;
4、获取所述数据采集装置采集的周围环境数据,所述周围环境数据至少包括周围环境影像;
5、将所述周围环境影像输入至预先训练的环境识别模型,确定所述目标巡检设备的周围环境的第一环境类别;
6、根据所述第一环境类别以及预设的环境与巡检操作的对应关系,确定所述目标巡检设备的目标巡检操作,以控制所述目标巡检设备按照目标巡检操作进行所述工业场景的巡检,以实现所述工业场景的远程巡检。
7、在一种可行实现方式中,所述周围环境数据还包括物理环境数据,则所述获取所述数据采集装置采集的周围环境数据,之后还包括:
8、利用所述物理环境数据进行数据特征提取处理,确定所述目标巡检设备的周围环境的周围环境特征;
9、根据所述周围环境特征以及预设的特征阈值,确定所述目标巡检设备的周围环境的第二环境类别。
10、在一种可行实现方式中,所述根据所述第一环境类别以及预设的环境与巡检操作的对应关系,确定所述目标巡检设备的目标巡检操作,包括:
11、利用第一环境类别以及第二环境类别进行综合判断处理,确定所述目标巡检设备的周围环境的目标环境类别;
12、根据所述目标环境类别以及预设的环境与巡检操作的对应关系,确定所述目标巡检设备的目标巡检操作。
13、在一种可行实现方式中,所述目标环境类别包括室内环境或室外环境,则所述根据所述目标环境类别以及预设的环境与巡检操作的对应关系,确定所述目标巡检设备的目标巡检操作,包括:
14、确定所述目标巡检设备的当前设备姿态;
15、若所述目标环境类别为室内环境,则确定所述环境与巡检操作的对应关系中与所述室内环境对应的第一巡检操作,并将所述当前设备姿态调整至所述第一巡检操作,所述第一巡检操作为目标巡检操作;
16、若所述目标环境类别为室外环境,则确定所述室外环境与巡检操作的对应关系中与所述室外环境对应的第二巡检操作,并将所述当前设备姿态调整至所述第二巡检操作,所述第二巡检操作为目标巡检操作。
17、在一种可行实现方式中,所述环境识别模型为深度学习模型,所述深度学习模型至少包括节点识别模型、词袋模型以及拓扑地图,所述节点识别模型包括若干的拓扑节点以及每个拓扑节点的节点自然路标,所述词袋模型包括以单词形式命名的各个拓扑节点的节点自然路标的节点标识,所述拓扑地图由拓扑节点、节点自然路标以及节点标识构建,则所述将所述周围环境影像输入至预先训练的环境识别模型,确定所述目标巡检设备的周围环境的第一环境类别,包括:
18、将所述周围环境影像输入节点识别模型进行节点识别,确定输出的节点识别结果,所述节点识别结果包括目标拓扑节点以及目标节点自然路标;
19、将所述目标拓扑节点以及目标节点自然路标输入所述词袋模型进行自然标识匹配,确定输出的词袋匹配结果,所述词袋匹配结果包括目标节点标识;
20、根据所述目标节点标识以及拓扑地图进行推理标记,确定输出的第一环境类别。
21、为实现上述目的,本发明第二方面提供一种工业场景的远程巡检系统,所述工业场景的远程巡检系统分别与控制终端及目标巡检设备具有通讯连接,所述目标巡检设备至少包括数据采集装置以及移动载体,所述数据采集装置用于采集所述目标巡检设备在所述工业场景中的周围环境数据,所述移动载体用于驱使目标巡检设备在所述工业场景中移动。
22、在一种可行实现方式中,所述目标巡检设备还包括保护罩、雨刷以及照明设备;
23、所述数据采集装置至少包括视频采集设备、辅助设备以及物理传感器;
24、所述视频采集设备至少包括摄像机;
25、所述辅助设备至少包括云台、解码器、支架、防护罩以及视频分配器中的一种或多种;
26、所述物理传感器至少包括光电式传感器、压电传感器、压阻式传感器、电磁式传感器、热电式传感器以及光导纤维传感器中的一种或多种。
27、为实现上述目的,本发明第三方面提供一种工业场景的远程巡检装置,所述装置应用于工业场景的远程巡检系统,所述装置包括:
28、指令收发模块:用于接收控制终端发送的巡检指令,并向目标巡检设备发送数据采集指令,所述目标巡检设备至少包括数据采集装置,所述数据采集指令用于控制数据采集装置进行所述目标巡检设备的周围环境的数据采集;
29、数据获取模块:用于获取所述数据采集装置采集的周围环境数据,所述周围环境数据至少包括周围环境影像;
30、环境识别模块:用于将所述周围环境影像输入至预先训练的环境识别模型,确定所述目标巡检设备的周围环境的第一环境类别;
31、巡检动作模块:用于根据所述第一环境类别以及预设的环境与巡检操作的对应关系,确定所述目标巡检设备的目标巡检操作,以控制所述目标巡检设备按照目标巡检操作进行所述工业场景的巡检,以实现所述工业场景的远程巡检。
32、为实现上述目的,本发明第四方面提供一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行第一方面及其任一可行实现方式所示步骤。
33、为实现上述目的,本发明第四方面提供一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行第一方面及其任一可行实现方式所示步骤。
34、采用本发明实施例,具有如下有益效果:
35、本发明提供一种工业场景的远程巡检方法,方法应用于工业场景的远程巡检系统,方法包括:接收控制终端发送的巡检指令,并向目标巡检设备发送数据采集指令,目标巡检设备至少包括数据采集装置,数据采集指令用于控制数据采集装置进行目标巡检设备的周围环境的数据采集;获取数据采集装置采集的周围环境数据,周围环境数据至少包括周围环境影像;将周围环境影像输入至预先训练的环境识别模型,确定目标巡检设备的周围环境的第一环境类别;根据第一环境类别以及预设的环境与巡检操作的对应关系,确定目标巡检设备的目标巡检操作,以控制目标巡检设备按照目标巡检操作进行工业场景的巡检,以实现工业场景的远程巡检。通过上述方式,可以提高工业场景的自动化程度,并且通过环境识别模型的环境识别结果进行目标巡检操作的确定,进一步的提高了巡检的自动化。
- 还没有人留言评论。精彩留言会获得点赞!