一种车辆碰撞监测方法及系统与流程
本发明涉及车辆碰撞监测,特别涉及一种基于多源传感器数据异常检测的车辆碰撞监测方法及系统。
背景技术:
1、在提高驾驶员交通规范监管的同时,建立一套完善的车辆碰撞实时监测系统,以便快速进行事故救援和交通梳理也是非常必要的。引入大数据、云计算、人工智能、物联网技术等先进的数字技术,能够最大程度地实现城市智慧交通管控的实战意义。
2、当车辆发生碰撞时,车身会产生x,y,z三个轴方向的加速度、角速度,同时车辆速度、刹车油门力度均有较大突变。
3、目前一般是依靠多种传感器对车辆碰撞前后的时序数据进行采样,然后通过碰撞检测系统对数据进行处理以及碰撞分析;当前能够实时采集、上传及处理多源时序数据,并且高效检测车辆碰撞事故的系统较少,且都存在有以下问题:
4、1、数据采集维度单一,大部分的碰撞检测方法只是依靠一两个维度的加速度传感器数据,导致碰撞检测精度较差,无法综合更多的车辆状态信息来提升碰撞检测准确度。
5、2、由于车辆的行驶数据复杂程度高,数据量巨大,而大多数的异常检测模型计算复杂、对算力和内存资源消耗大,不能兼顾系统的实时性要求。
6、3、车辆的碰撞场景、车身损坏程度都存在较大差异,在时序数据上的表现更是千变万化,现有方法很难对轻微碰撞、刮擦、爆胎等小事故进行召回。
7、4、现有点的碰撞检测系统无法对检测出的事故线索进行精准核实,大部分是采用电话沟通、app交互等方式与驾驶员核实,但这样只能核实少量事故,无法保证推送的碰撞事故较高的准确率与召回率。
技术实现思路
1、为解决上述问题,本发明提供了一种车辆碰撞监测方法,具体技术方案如下:
2、s1:智能车载传感器采集车辆的行驶数据,并将采集的各种数据上传到云端服务器;
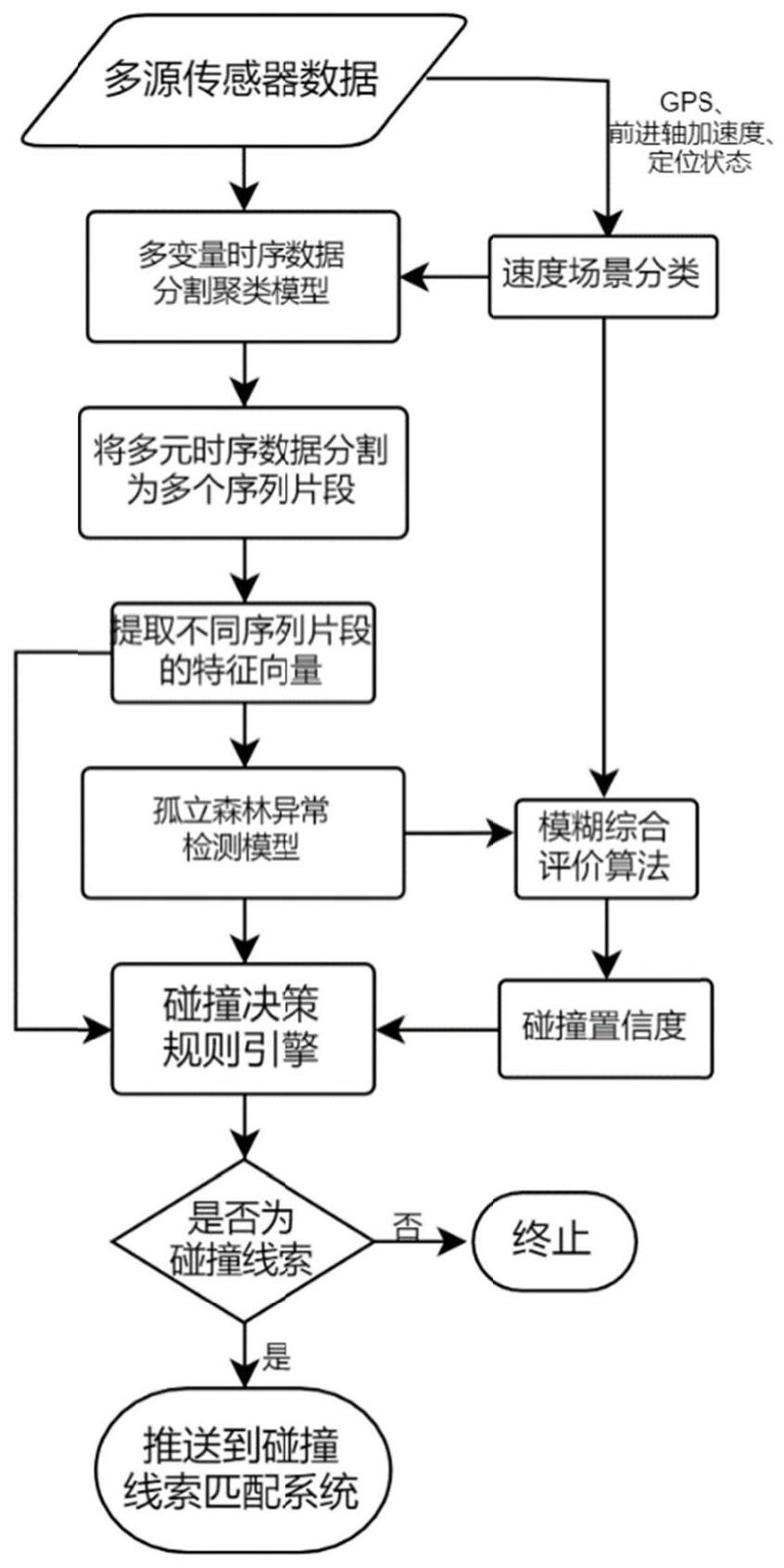
3、s2:通过大数据实时处理系统对采集的行驶数据进行解码、分析、处理后输入到训练好的多变量时序数据分割聚类模型中;
4、s3:对输入的多元时间序列进行分割和聚类,将长时间片段分割为多个子片段,并把所述子片段分类到固定的场景中;
5、s4:构建孤立森林模型,对所述子片段提取特征向量,将提取的特征分布输入到对应场景、对应特征的孤立森林模型中,得到异常分数向量;
6、s5:通过模糊综合评价方法,基于每个所述子片段的异常分数向量,计算每个所述子片段的碰撞置信度,然后将所述子片段中最大的碰撞置信度作为整个长时间序列的碰撞置信度;
7、s6:将整个长时间序列的碰撞置信度与场景分类数据、孤立森林模型输出以及异常子片段的特征向量,输入碰撞决策规则引擎中,最终判断是否推送该条线索。
8、进一步的,分割聚类模型,表示如下:
9、
10、其中,θi是第i类的协方差矩阵,μi是均值向量,x是输入信号段,pi(x)表示该信号段属于均值向量为μi,协方差矩阵为θi的高斯分布的概率。
11、进一步的,所述异常分数向量,获取的具体过程如下:
12、s401:对个场景对应的每个特征进行单独建模,并进行训练;
13、s402:通过训练好的孤立森林模型,对输入的各子片段特征数据进行异常打分,输出异常分数值,如下:
14、
15、其中,e(h(x))为输入的样本在模型t棵itree的路径长度的均值,c(n)为输入的n个样本构建一个bst二叉树的平均路径长度。
16、进一步的,所述孤立森林模型,训练过程如下:
17、m1:从训练数据中随机选择ψ个点样本点作为样本子集,放入树的根节点;
18、m2:随机指定一个维度即特征,在当前节点数据中随机产生一个切割点p,切割点产生于当前节点数据中指定维度的最大值和最小值之间;
19、m3:基于该切割点生成了一个超平面,将当前节点数据空间划分为2个子空间,将指定维度里小于p的数据放在当前节点的左子节点,把大于等于p的数据放在当前节点的右子节点;
20、m4:在子节点中递归步骤m2和m3,不断构造新的子节点,直到子节点中只有一个数据,即无法再继续切割,或子节点已到达限定高度;
21、m5:循环执行m1至m4,直至生成t个孤立树itree。
22、进一步的,所述长时间序列的碰撞置信度,获取过程如下:
23、s501:基于专家经验,赋予不同特征在各异常程度中的权重占比,构建模糊关系矩阵;
24、s502:对某个子片段的各个特征的异常得分进行归一化处理,再与模糊关系矩阵进行点乘,得到该片段特征在各异常程度上的得分;
25、s503:对不同异常程度的得分进行权重相乘后求和,获得该片段的碰撞置信度;
26、s504:将长时间序列中分割的每个子片段对应的碰撞置信度中最大的碰撞置信度作为整个长时间序列的碰撞置信度。
27、进一步的,还包括:
28、s7:将推送的碰撞线索匹配到对应时刻的视频,并传输给客服人员进行二次核查,确定为碰撞后联系车主是否需要救援,并将该条碰撞事故信息传输给第三方。
29、本发明还公开了一种车辆碰撞监测系统,包括数据采集模块、大数据实时处理单元、碰撞检测模块以及碰撞决策模块;
30、所述数据采集模块用于通过传感器采集车辆的行驶数据,并传输至所述大数据实时处理单元;
31、所述大数据实时处理单元用于对数据进行解码、分析和处理,并将处理后的数据传输至所述碰撞检测模块;
32、所述碰撞检测模块包括分割聚类模块和异常检测模块,分别存储有多变量时间序列分割聚类算法和模糊孤立森林异常检测算法,用于计算获取长时间序列的碰撞置信度,并将碰撞置信度以及场景分类数据、孤立森林模型输出以及异常子片段的特征向量,传输至所述碰撞决策模块;
33、所述碰撞决策模块用于根据接收的数据信息,基于设定的规则,判断是否推送该条线索,如果符合设定规则,则将该条碰撞线索推送,如果不符合设定规则,则结束。
34、进一步的,所述数据采集模块还通过车辆上的视频设备采集视频数据,并通过算法筛选出异常的视频数据传输至云端。
35、进一步的,异常的视频数据筛选过程如下:
36、基于加速度传感器采集的数据,获取x,y,z轴的一阶差分值,并进行求和,判断求和结果是否大于预设阈值;
37、如果大于预设阈值,则将当前时刻前后设定时间段内的视频数据作为异常的视频数据上传,反之,不进行上传。
38、进一步的,系统还包括碰撞线索视频匹配模块,用于接收所述碰撞决策模块推送的碰撞线索以及云端的视频数据,基于推送的碰撞线索检索匹配对应的视频数据,并将检索到的视频数据发送至终端,进行人工判别,若判别为碰撞,则推送至第三方,若判别为非碰撞,则结束。
39、本发明的有益效果如下:
40、1、基于传感器采集的多元时间序列数据,通过分割聚类模型将长段的时间序列数据分割为不同的小片段,再将这些小片段聚类为不同可解释的片段场景,提高了车身状态信息感知的准确性,模型采用无监督的生成类模型,主要保存协方差矩阵参数,将模型的主要的计算量设置在训练过程,降低使用时占用的计算和内存资源,保证了系统的实时性要求。
41、2、通过对不同场景下的不同特征进行分别建树组成孤立森林,从多维度出发,再对每一维特征的检测结果进行场景异常度判断,最后与模糊矩阵进行模糊运算得到最终评价结果,同时有效地解决了不同场景片段数据对于每一属性的异常程度不同的问题,极大提升了对轻微碰撞、刮擦、爆胎等小事故的感知能力。
- 还没有人留言评论。精彩留言会获得点赞!