基于动态数据流实时趋势分析的高速公路拥堵识别方法
1.本发明属于智能交通研究领域,具体涉及一种基于动态数据流实时趋势分析的高速公路拥堵识别方法。
背景技术:
2.高速公路一旦发生拥堵,将会导致高速公路的运行效率降低,甚至道路交通瘫痪,进而带来经济损失、能源浪费、汽车尾气污染等一系列问题。解决这些问题的关键就是及时有效地预测拥堵的发生,高速公路管控人员可通过预警信息,采取有效的抢救措施,避免拥堵的发生或拥堵情况的进一步恶化。
3.目前高速公路交通状态判别方法主要是聚类分析方法和基于人工智能的方法。然而,聚类分析往往需要从大量数据中提取特征,可能无法满足交通状态判别的实时性。而人工智能例如支持向量机算法只适用于小样本的数据,人工神经网络计算过程繁杂,不易操作。
技术实现要素:
4.本发明的目的在于提供一种基于动态数据流实时趋势分析的高速公路拥堵识别方法。
5.实现本发明目的的技术解决方案为:一种基于动态数据流实时趋势分析的高速公路拥堵识别方法,具体步骤为:
6.步骤1、确定拥堵和非拥堵状态下车速和车流量的阈值;
7.步骤2、通过车检器采集高速公路数据提取车辆速度、车流量参数,并对数据进行归一化处理;
8.步骤3、用不断到达的数据扩充当前数据段;
9.步骤4、采用增量递推最小二乘算法,进行递推回归建模;
10.步骤5、基于动态规划的广义似然比检验,用于对变化点的检测,判断是否需要更新数据段;
11.步骤6、将预测值与步骤1确定的阈值进行比较,识别拥堵状态。
12.本发明与现有技术相比,其显著优点为:(1)本发明适用于高速公路检测器中大量连续到达、潜在无限长、快速变化的数据组成的有序时间序列,为道路管控人员提供早期预警和决策支持;(2)数据流分析算法计算效率高,满足实时性或近似实时性,并且计算过程资源消耗少。
13.下面结合附图对本发明做进一步详细的描述。
附图说明
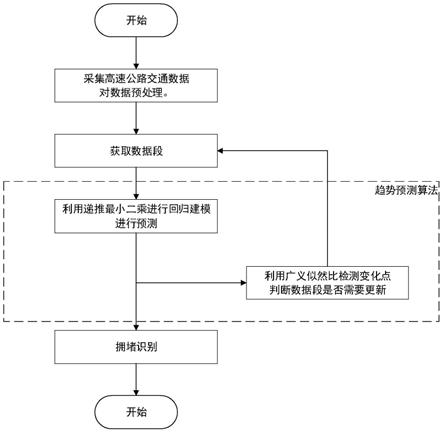
14.图1为基于动态数据流实时趋势分析的高速公路拥堵识别方法流程图。
具体实施方式
15.如图1所示,一种基于动态数据流实时趋势分析的高速公路拥堵识别方法,具体步骤为:
16.步骤1、确定拥堵和非拥堵状态下车速和车流量的阈值;
17.步骤2、通过车检器采集高速公路数据,提取车速、车流量参数,并对数据进行归一化处理;
18.步骤3、用不断到达的数据扩充当前数据段;
19.步骤4、采用增量递推最小二乘算法,进行递推回归建模;
20.步骤5、基于动态规划的广义似然比检验,对变化点进行检测,判断是否需要更新数据段;
21.步骤6、将预测值与步骤1确定的阈值进行比较,判断拥堵情况。
22.进一步的,步骤1中车速阈值为70km/h,车流量阈值为1600pcu/h。
23.进一步的,步骤3建立数据段的具体方法为:
24.从当前数据段x
s
的起始点(x
s
,1)开始,不断到达的新数据元素x(t
c
)持续扩充x
s
,设当前序列x
s,n
={x(t
s,1
),
…
,x(t
s,n
)},其中n为当前序列中有n个元素。
25.进一步的,步骤4采用增量递推最小二乘算法,进行递推回归建模的具体方法为:
26.步骤4-1、建立回归模型,以向量形式表示回归方程,则为x
s,n
=u
s,n
θ
s,n
+ε
s,n
27.式中,rank(u
s,n
)=2<n;ε
s,n
为期望为0的随机误差向量;
28.步骤4-2、以增量递推最小二乘法估计参数θ
s,n
,则
[0029][0030]
式中,
[0031]
步骤4-3、在回归模型参数θ
s,n
的基础上,采用递推方程快速获得新的回归模型参数θ
s,n+1
得出预测值,回归模型参数的递推计算式为θ
s,n+1
=θ
s,n
+δθ
s,n
[0032]
式中,
[0033]
步骤4-4、利用递推出的新模型参数和回归方程,预测出下一时刻的交通数据。
[0034]
进一步的,步骤5对广义似然比检验检测变化点的具体方法为:
[0035]
变化点就是数据段发生变化的点,即数据段新获取的数据;
[0036]
步骤5-1、在模型标准差μ
s,n
的基础上,计算μ
s,n+1
,再计算广义似然比统计量f
[0037]
μ
s,n+1
=μ
s,n
+δμ
s,n
[0038]
其中,μ
s,n+1
的初值μ
s,0
为0;
[0039][0040]
式中,n为当前数据段中有n个元素;
[0041]
步骤5-2、当f>δ时,x(t
c
)为x
s,n
的分割点,令x
s
=x
s,n
,并以θ
s,n
中的第n个元素作为x
s
的趋势特征值,更新当前数据段;以x(t
c
)为新的当前数据段的起始点,转步骤3;
[0042]
步骤5-3、当f<δ时,x(t
c
)不是x
s,n
的分割点,更新参数θ
s,n
和μ
s,n
,转步骤3;
[0043]
进一步的,步骤6识别拥堵状态的具体方法为:
[0044]
当车速小于等于v且车流量大于等于q,车辆进入拥堵状态,否则为非拥堵状态。其中车速阈值v为70km/h,车流量阈值q为1600pcu/h。
[0045]
本发明提出一种基于增量递推最小二乘法的动态数据流趋势分析算法,根据高速公路车检器采集的数据连续到达,快速变化的特点,采用增量计算快速检测数据流分割点并确定分段,所以预测的数据实时性比较强,适用于对高度公路数据的实时辨识和预测。同时根据新到数据实时调整趋势参数,采用广义似然比检测分割点,因而趋势分析的精度明显提高。
[0046]
本发明对增强高速公路交通的宏观控制能力、应变能力和对拥堵情况的预测方法的研究都具有非常重要的现实意义。
[0047]
下面结合实施例对本发明技术方案进行详细说明。
[0048]
实施例
[0049]
如图1所示,一种基于动态数据流实时趋势分析的高速公路拥堵识别方法,具体步骤为:
[0050]
步骤1、确定阈值:确定拥挤和非拥挤状态下车速的阈值v和车流量q,具体方法为:
[0051][0052]
表格中阈值是根据我国交通运输部颁布的《公路网运行监测与服务暂行技术要求》中的路段状态等级划分标准与高速公路基本路段服务水平分级表相结合确定的。
[0053]
根据高速公路交通流运行的特性,采用速度和车流量指标作为衡量交通运行状态的关键变量,可将表中基本畅通一行中的速度与车流量作为阈值来判断高速公路拥堵状况。
[0054]
步骤2、采集数据:通过车检器采集高速公路数据提取车辆速度、车流量参数,并对数据进行归一化处理;
[0055]
步骤3、获取数据段:用不断到达的数据扩充当前数据段,具体方法为:
[0056]
从当前数据段x
s
的起始点(x
s
,1)开始,不断到达的新数据元素x(t
c
)持续扩充x
s
,设当前序列x
s,n
={x(t
s,1
),
…
,x(t
s,n
)}。
[0057]
步骤4、建立模型:采用增量递推最小二乘算法,进行递推回归建模,具体方法为:
[0058]
步骤4-1、建立回归模型,以向量形式表示回归方程,则为x
s,n
=u
s,n
θ
s,n
+ε
s,n
[0059]
式中,rank(u
s,n
)=2<n;ε
s,n
为期望为0的随机误差向量;
[0060]
步骤4-2、以增量递推最小二乘法估计参数θ
s,n
,则
[0061][0062]
式中,
[0063]
步骤4-3、在回归模型参数θ
s,n
的基础上,采用递推方程快速获得新的回归模型参数θ
s,n+1
得出预测值,回归模型参数的递推计算式为θ
s,n+1
=θ
s,n
+δθ
s,n
[0064]
式中,
[0065]
步骤4-4、利用递推出的新模型参数和回归方程,可以预测出下一时刻的交通数据。
[0066]
步骤5、检测变化点:基于动态规划的广义似然比检验,用于对变化点的检测,判断是否需要更新数据段,具体方法为:
[0067]
变化点就是数据段发生变化的点,即数据段新获取的数据;
[0068]
步骤5-1、在模型标准差μ
s,n
的基础上,计算μ
s,n+1
,再计算广义似然比统计量f
[0069]
μ
s,n+1
=μ
s,n
+δμ
s,n
[0070]
其中,μ
s,n+1
的初值μ
s,0
为0;
[0071][0072]
式中,n为当前数据段中有n个元素;
[0073]
步骤5-2、当f>δ时,x(t
c
)为x
s,n
的分割点,令x
s
=x
s,n
,并以θ
s,n
中的第n个元素作为x
s
的趋势特征值,更新当前数据段;以x(t
c
)为新的当前数据段的起始点,转步骤3;
[0074]
步骤5-3、当f<δ时,x(t
c
)不是x
s,n
的分割点,更新参数θ
s,n
和μ
s,n
,转步骤3;
[0075]
当希望提取数据流长期趋势特征时,取较大的δ值;当希望提取数据流短期趋势特征时,取较小的δ值,δ取1~9之间的值。
[0076]
步骤6、识别拥堵状态:将预测值与步骤1确定的阈值进行比较,判断拥堵情况。
[0077]
当车速小于等于v且车流量大于等于q,车辆进入拥堵状态,否则为非拥堵状态。其中车速阈值v为70km/h,车流量阈值q为1600pcu/h。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1