多步交通预测的制作方法
1.本发明涉及交通控制系统,尤其涉及一种通过将统计和机器学习应用于大数据处理来优化交通预测的系统。
背景技术:
2.交通拥堵给城市基础设施带来严峻挑战,也影响人们的社会经济生活,因为在等候交通时浪费了时间。
3.尽管存在描述交通流模型的多种特性,但我们可以遵循一个一般性假设,即交通流数据是一个时间序列,它是一个时间索引的值序列(即,包含各种类型数据的元组:车辆数量、车辆速度等)。交通数据可以按时间顺序从各种来源(如摄像头或街道感应回路传感器)收集。这些数据由测量交通指标的传感器随着时间的推移不断生成。这些传感器通常在空间上分布在城市基础设施中。
4.人们已经开发各种交通建模和控制方法,例如宏观/微观模型、过滤模型和其它组合模型。此类研究缺乏实际部署,原因包括预测精度低、无法处理相关性、对数据要求严格、缺乏表现度或缺乏对内部机制的理解以及不可容忍的预测时间成本。
5.现有交通预测模型在实际应用中失败的关键原因在于,它们未能充分利用可用交通流传感器源中的时空相关性,例如动态空间因素,即车辆的拓扑(空间)结构和固有时间流及其相关性,这些相关性可以通过城市群中可用的多个廉价传感器来感测。同时,摄像头价格高昂、侵入性强、难以维护并且需要利用算法来处理数据,这增加了此类方案的成本,导致其无法大规模实施。
6.用于时间序列预测的典型统计和机器学习模型,例如自回归滑动平均系列(ar、ma、arma、arima)、贝叶斯推理和回归树,只能对一维时间序列进行建模和预测。此类预测模型假设数据中的相关性可以通过全局时间固定的参数来充分描述。此外,它们本质上不能扩展为多元空间相关预测,这使得它们不适用于数据之间的相关性呈动态和异构的情况,尤其是空间驱动的情况,例如道路交通数据。
7.在基于机器学习的时间序列建模和预测领域,有各种方法试图弥补典型统计方法的局限性,并对新技术进行补充以提高表现度和灵活性。该领域的现有技术侧重于采用贝叶斯积分、支持向量回归、非线性最小二乘法、组合方法和专家系统的离线程序。
8.以下文献所述的方法假设所涉及模型的多样性和精确度是选择模型时要考虑的最重要因素,并研究了一种基于神经网络和元特征的时间序列预测的新方法:r.fonseca等人,“时间序列预测组合方法中的自动模型选择”,《ieee汇刊》,第14卷第8期,第3811至3819页,2016年8月。该方法在选择预测器时自动调整多样性和精确度之间的所需平衡,并在高度非线性的时间序列上提供了良好的结果。然而,离线无监督训练和复杂的模型更新导致该方法难以适应实时场景。
9.以下文献所述的另一种方法假设了解时间序列复杂度可以使自适应预测决策支持系统的设计能够积极支持预测行为和结果的精确度:m.adya等人,“开发和验证基于规则
的时间序列复杂度评分技术以支持自适应预测决策支持系统(dss)的设计”,第83卷,2016年。该系统以基于规则的复杂度评分技术为基础,该技术使用十二条规则生成时间序列的复杂度评分,这些规则依赖于序列的十四个特征。尽管在建模中嵌入专家系统规则是一种有趣的方法,但决策系统选择模型时需要大量规则和特征,导致其难以符合实时处理所需的低资源和低时间预算要求。此外,该预测决策支持系统(forecasting decision support system,fdss)着眼于复杂特征,例如不连续度、基本趋势方向、水平不连续度和域知识,这确实可以增加适应性,但也会增加复杂度和计算时间。这些指标不是增量计算的,而是离线计算的,因此计算时间取决于序列的长度,但没有任何实时预测要求。
10.在交通预测领域,为了满足交通拥堵预警的需求,许多研究都提出了基于大数据驱动理论的实时交通流状态识别和预测方法。交通大数据具有时间相关性、空间相关性、历史相关性和多态性等特点。
11.以下文献所述的方法通过使用基于模拟退火遗传算法的模糊c均值(simulated annealing genetic algorithm based fuzzy c-means,saga-fcm)的交通聚类模型来量化交通流状态,这是交通流状态识别的基础:huapu lu、zhiyuan sun和wencong qu,“基于大数据驱动的实时交通流状态识别与预测”,《自然与社会离散动力学》,第2015卷,文章编号284906,11页,2015年。考虑到计算简单、预测精度高,建立了区域交通流相关性分析双层优化模型,以基于时间-空间-历史相关性预测交通流参数。尽管该模型具有灵活性,但它对模型的时空参数化进行了许多假设,在交通拥堵缓解方面仅获得10%的增益。
12.以下文献所述的另一种方法采用随机信元传输模型(stochastic cell transmission model,sctm)进行概率交通状态评估,该模型结合从空间相关性分析中校准的协方差结构:t.l.pan、a.sumalee、r.x.zhong和n.indrapayoong,“基于时空相关性的短期交通状态预测”,《ieee智能交通系统汇刊》,第14卷第3期,第1242至1254页,2013年9月。尽管模型背后的计算量很大,但该系统的所有预测的总体最大绝对百分比误差(maximum absolute percentage error,mape)约为16.2%,遗憾的是,该数字仅在静态实证研究中获得(而不是在真实场景中获得)。
13.以下文献中的研究采用了更面向实时的方法研究概率假设密度(probability hypothesis density,phd)过滤器在实时交通状态估计方面的潜力:m.canaud、l.mihaylova、j.sau等人,(2013年),“用于实时交通状态估计和预测的概率假设密度过滤”,《网络与非均匀介质》(nhm),8(3),第825至842页。该研究采用与phd过滤器耦合的信元传输模型(cell transmission model,ctm),考虑了测量来源的不确定性,并表明这可以在交通设置和实时计算成本方面提供高精确度。尽管该模型具有很大的吸引力,但它仅用于没有大量车道和交叉路口的高速公路环境,在实际交通环境下复杂度通常会增大。
14.us 2002/0067292 a1描述了使用传感器系统进行环境感测,以进行智能场景解释。为了确定机动车辆相对于行车道的位置,将来自与导航系统耦合的数字道路地图的数据与距离解析传感器提供的数据相融合。在这种背景下,对距离解析传感器的接收信号的特征和距离相关变化进行评估,以确定距离道路边缘的距离。
15.需要开发一种能解决这些问题的交通预测方法。
技术实现要素:
16.根据第一方面,提供了一种用于根据从多个传感器接收的数据预测道路交通流的道路交通流预测系统,所述多个传感器中的每个传感器用于获取相应位置处的道路交通数据,其中,所述系统用于:从所述传感器接收数据;实现机器学习算法,以根据所述接收的数据的时间序列学习第一位置处的交通流与所述传感器所在的其它位置处的交通流之间的关系的模型;实现所述模型,以根据从所述传感器接收的其它数据预测所述第一位置处的交通流的时间序列。
17.所述传感器中的至少一个传感器可以是用于在所述相应位置捕获车辆的一个或多个图像的摄像头。这可以允许确定在特定时间段内通过某个位置的车辆数量。
18.所述模型可以包括根据所述第一位置相对于所述其它位置的空间关系确定的权重。所述相应位置的所述权重可以随着该位置与所述第一位置的空间距离而减小。因此,距离所考虑位置较远的位置可能比空间上较近的位置具有更小的影响。
19.所述系统还可以用于根据从所述传感器接收的所述数据以时间增量迭代地更新所述权重。这可以提高所学习模型的精确度。
20.所述模型可以是神经网络。这可以是一种方便的实现方式。
21.所述位置可以是相应的交通交叉路口。所述系统还可以用于生成位于所述交叉路口处的多组交通信号灯的时间计划。因此,所述系统可以用于预测和控制多个交叉路口处的交通。
22.根据第二方面,提供了一种用于根据从多个传感器接收的数据预测道路交通流的方法,所述多个传感器中的每个传感器用于在相应交通位置处获取道路交通数据,其中,所述方法包括:从所述传感器接收数据;实现机器学习算法,以根据所述接收的数据的时间序列学习第一位置处的交通流与所述传感器所在的其它位置处的交通流之间的关系的模型;实现所述模型,以根据从所述传感器接收的其它数据预测所述第一位置处的交通流的时间序列。
23.所述传感器中的至少一个传感器可以是用于在所述相应位置捕获车辆的一个或多个图像的摄像头。这可以允许确定在特定时间段内通过某个位置的车辆数量。
24.所述模型可以包括根据所述第一位置相对于所述其它位置的空间关系确定的权重。所述相应位置的所述权重可以随着该位置与所述第一位置的空间距离而减小。因此,距离所考虑位置较远的位置可能比空间上较近的位置具有更小的影响。
25.所述方法还可以包括根据从所述传感器接收的所述数据以时间增量迭代地更新所述权重。这可以提高所学习模型的精确度。
26.所述模型可以是神经网络。这可以是一种方便的实现方式。
27.所述位置可以是相应的交通交叉路口。所述方法还可以包括生成位于所述交叉路口处的多组交通信号灯的时间计划。因此,所述方法可以用于预测和控制多个交叉路口处的交通。
28.根据第三方面,提供了一种计算机程序,当所述计算机程序由计算机执行时,使所述计算机执行上述方法。所述计算机程序可以存储在非瞬时性计算机可读存储介质上。
附图说明
29.现参照附图通过示例描述本发明。其中:
30.图1示出了交通预测的处理设置示例的概况;
31.图2示出了从用于区域中在空间上较远的交叉路口处收集交通流时间序列数据的摄像头接收数据的系统的示例性实现方式;
32.图3示出了从用于在相邻交叉路口处收集交通流时间序列数据的摄像头接收数据的系统的另一示例性实现方式;
33.图4示出了交通预测系统的示例性架构的概况;
34.图5示出了交通预测系统的模块;
35.图6示出了时间道路交通流时间序列预测模块中的多步时间学习和预测;
36.图7示出了时间序列的时空建模;
37.图8(a)至图8(c)示出了使用交通预测系统的数据的空间建模;
38.图9示出了系统中的非线性自回归时空预测;
39.图10示出了交通预测系统的运行时功能;
40.图11(a)至图11(c)示出了使用该系统的时空数据的实际运用;
41.图12示出了系统的可扩展性特征;
42.图13示出了用于预测道路交通流的方法的示例。
具体实施方式
43.本发明涉及一种用于通过聚合来自时空相关传感器数据源的数据来预测道路交通流以描述城市环境中的交通场景的系统和方法。例如,从一个交叉路口级别,到一系列交叉路口级别,再到多个交叉路口形成的区域。交通流可以定义为在特定时间段内通过特定点的车辆数量(例如,每分钟的车辆数量),或每个交通信号灯周期通过交叉路口的车辆数量(即,在交叉路口处的交通信号灯为绿灯的时间段内通过的车辆数量)。因此,用于评估车辆数量的时间分辨率可以是单位时间段,也可以是交通信号灯周期的持续时间。
44.图1示出了描述城市交通环境的典型场景(即,两条或多条道路的交叉路口)。在交叉路口101处,给定由交通流传感器103-106测量的道路s1-s4的交通流数据102(即,每条车道通过的车辆数量),交通预测系统可以预测道路s1-s4的交叉路口处的未来交通流107和交通信号灯的控制时间108,以使通过交叉路口的交通流最大化。
45.仅在每个位置、边缘(即,连接两个交叉路口并与另一条道路交叉形成交叉路口的道路)或交叉路口处使用摄像头数据进行交通流预测不仅成本高昂,而且需要额外的基础设施,例如专用图像处理软件。因此,大规模安装此类系统并不具有成本效益。此外,隐私问题也是一个障碍。仅使用交叉路口的一个边缘的摄像头数据也不够,因为所有边缘在空间和时间上都是相关的。然而,在城市级别,交叉路口的每个边缘都与其它会影响当地道路交通流估计的边缘相连。
46.本文所述的系统利用局部时间相关性、全局空间相关性和位置之间的连通性,因此可以有助于整体改进局部和全局预测。作为一个本质上复杂的过程,可以使用时空模型对道路交通流进行建模以进行预测,该模型以空间分布时间序列(即,时间索引值序列)的形式假设数据。所述系统能够接收交通数据时间序列,提取可用传感器值之间的时空相关
性,最后对任意时间范围内的未来交通流进行预测。
47.如图2的示例性实施例所示,城区200包括:一系列道路,车辆可以沿着这些道路在至少一个方向上行驶;以及交叉道路之间的交叉路口或十字路口。第一交通流传感器201位于交通交叉路口202的第一位置。第一传感器用于获取数据,所述数据提供交叉路口处车辆数量的测量值,从而据此确定交通流。优选地,第一传感器201是用于收集交叉路口处的车辆数量图像的摄像头,据此可以确定交通流。可替代地,第一交通流传感器可以是感应回路。第二交通流传感器204位于在空间上远离第一交叉路口202的交叉路口203的第二位置处。第三交通流传感器206位于在空间上远离第一和第二交叉路口的交叉路口205的第三位置处。
48.道路交通流预测系统用于根据从传感器201、204、206接收的数据预测道路交通流。如下文将更详细描述的,所述系统实现机器学习算法,以根据从传感器接收的数据的时间序列学习第一位置(交叉路口202)处的交通流与所述传感器所在的其它位置(交叉路口203、205)处的交通流之间的关系的模型。所述系统实现该模型,以根据从传感器接收的其它数据预测第一位置(即,交叉路口201)处的交通流的时间序列。所述系统可以预测该区域中多个位置处的交通流的时间序列。在另一实施例中,所述系统预测该区域中所有位置处的交通流的时间序列。在该示例中,交通流传感器位于该区域的交叉路口处。然而,所述系统可以从位于该区域的更多或更少位置或交叉路口处的传感器接收数据。交叉路口的预测交通流时间序列可以用于控制位于相应交叉路口处的交通信号灯的序列,如207、208、209所示,以改进交叉路口处的道路交通管理。
49.所述模型为从每个传感器接收的数据分配权重。应用于从相应传感器接收的数据的权重随着相应传感器所在的位置与第一位置(预测交通流的特定位置)的距离而减小。例如,在图2中,预测交叉路口202处的交通流时,来自位于交叉路口203(在空间上比交叉路口205更靠近交叉路口202)处的传感器的数据被赋予比来自交叉路口205处的传感器的数据更高的权重。
50.模型的优化是结合历史数据和当前交通数据的传入流(例如,车辆数量、车辆速度、交通信号灯处的占用情况等)持续进行的。
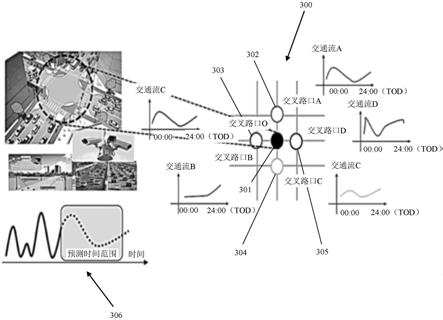
51.在另一个示例中,如图3所示,所述系统使用最近5天内在交叉路口a(302)、交叉路口b(303)、交叉路口c(304)、交叉路口d(305)和交叉路口o(301)处记录的交通流曲线图,生成通过301所示交叉路口o的交通流的多步(未来时间范围,即分钟、小时等)预测。
52.通过交叉路口o的交通流的多步预测如306处所示。该方法可用于使用来自其它交叉路口的记录交通流曲线图来预测交叉路口a、b、c、d和o中的每一个或多个或所有交叉路口处的交通流。交叉路口a、b、c和d是交叉路口o的相邻交叉路口。“相邻”是指两个交叉路口之间明显连接(通过边缘)。图3中的交叉路口在空间滞后1处相邻(1跳远),这意味着与交叉路口o直接相邻。距离参考交叉路口(在本例中为o)越远的交叉路口,空间滞后越高。
53.可以使用每个交叉路口的预测交通流时间序列来控制交通信号灯序列,以改进交叉路口处的道路交通管理。所述系统是与每个交叉路口的交通控制系统交互的组件。因此,该系统位于交通估计和建模与交通信号灯序列控制组件之间的交叉路口处。
54.图4介绍了该系统的整体架构和数据流。如400处的流程图所示,该系统包括几个部分,这些部分协同处理传入的传感器时间序列数据,如401所示。
55.该系统利用能够学习交通流时间序列样本401之间的非线性的递归时间预测模块402,以便预测任意未来时间范围的交通流。时空相关性融合模块403利用每个位置处的多个交通流预测的空间邻接性和时间相关性,来提取特定位置的时间序列对其邻居的影响的加权机制。给定从每个交叉路口提取的每个交通流时间序列的权重以及针对单个交叉路口的时间范围内预测,递归时空预测模块404推断出对各个交叉路口的交通流预测的更精确预测。
56.整个系统可以通过嵌入空间邻域数据和学习任意预测大小的时空相关性来预测单个或多个位置和/或交叉路口(即,在一个区域中)的道路交通流。
57.该系统利用能够捕获传感器时间序列形状和时间分布的时间相关学习机制,以及负责融合数据的时空相关学习和加权机制及根据简单操作的强大多元推理机制,允许在大范围、区域和城市级别改进高度非平稳问题(例如交通流预测)的时间序列预测。
58.所提出的系统具有灵活的基础设施,可以利用道路交通传感器相关性并提取可理解的时空关联,以改进交通预测。它是一种轻量级学习系统,能够使用递归计算层提取描述道路交通的基础传感器统计数据。此外,预测系统具有简单的模块化结构和可解释的输出,适用于双传感器、三传感器、多传感器场景(如区域或城市级别的交通流预测)。由于系统的学习能力较强,不需要对传感器关联和传感器模型进行显式编码。该系统采用高效机制,在给定可用交通流时间序列的情况下,具备在任何空间连接的交叉路口处推断交通流的固有能力,因此可最大限度地降低为所有交叉路口配备摄像头的相关成本。从计算的角度来看,由于效率高,该系统不需要固定或大量历史数据来学习,并且可以提供任意预测时间范围。
59.因此,该系统提供了一种流水线处理机制,该机制能够通过利用每个单独的道路交通交叉路口或边缘的固有时间相关性来预测交通流时间序列,以系统的方式利用时空相关性来融合单独的预测,并且能够利用融合的视角来预测所有时间序列,以针对任意时间范围改进预测。
60.该功能嵌入在所提出系统的组成模块中,如图5所示。该示例性系统具有三个子系统。现在将描述每个元素以及它们如何对实际交通预测中的整个系统的性能产生积极影响。
61.来自位于n个交叉路口的传感器的输入时间序列数据集如500处所示。非平稳和确定性时间序列的建模需要使用专门的机制来解释它们的特性。此外,处理多个此类相关时间序列会产生适当的层来描述其协方差。时间道路交通流时间序列预测模块501使用非线性自回归(nonlinear autoregressive,nar)神经网络来预测每个位置或交叉路口的单独交通流时间序列。该模块使用前馈神经网络对传感器读数与用于多步预测的反馈回路之间的时间关系函数进行回归。此类系统很容易训练和快速收敛到精确的预测,即使历史数据不大且处于任意时间范围内也是如此。该模块使用道路交通的历史数据(例如,通过摄像头确定的交叉路口的车辆数量)来预测未来某个时间范围(例如,分钟、小时、天等)的交通流。该系统学习每个位置记录的交通流样本之间的非线性时间相关性,并利用递归来预测任意大小的时间范围的交通流。
62.核心假设是,区域中的连接位置(例如交叉路口)在本质上具有时空相关性。这种相关性在其日常时间交通流模式中被认为是可见的。为了实现根据历史数据的单个时间序列的多步预测(即,任意未来时间范围),采用了递归神经网络。该神经网络是由以下等式定
义的非线性自回归(nonlinear autoregressive,nar)神经网络输入:
63.y(t)=f(y(t-1),y(t-2),
…
,y(t-n)),y
–
1d
ꢀꢀꢀ
(1)
64.其中,输出信号y(t)的下一个值根据输出信号的先前值进行回归。通过以下方式实现该模型:利用前馈神经网络逼近函数f,利用递归关系对任意时间范围进行多步预测。
65.来自传感器的各个时间序列数据被馈送到各个时间预测器,这些时间预测器利用每个时间序列内的时间相关性输出各个交通流预测,如图6所示。在训练阶段,向系统馈送一段时间内记录的历史数据,而在推理阶段,系统输出各个道路交通流时间序列的期望(任意)预测值。
66.因此,该模块根据从单个交叉路口的历史数据中学习的时间关系来预测单个交通流时间序列。
67.时空道路交通流时间序列融合模块502使用根据时空自回归(starma)的通用多元时间序列时空学习模型。该模型应用于每个交叉路口处的观测值和相邻交叉路口处的观测值之间,如图7所示。该模块利用各个交叉路口之间的时空相关性来学习加权方案,以确定每个交叉路口处的交通流对相邻交叉路口处的交通流的影响。
68.系统自动从交通流时间序列中提取要在时间估计中考虑的过去样本的最佳值,并学习加权每个相邻交通流时间序列对局部预测的影响的参数。
69.交叉路口的空间布局和车辆可以行驶的方向被编码在问题中,并且系统学习每个交通流估计器的贡献(即,权重)。加权机制考虑交叉路口的空间邻近度(大规模)和每个交叉路口的方向(细粒度),分别如图8(a)和8(b)中的空间关系和空间关系矩阵所示。图8(c)显示了空间滞后权重矩阵的示例。在滞后1处,所有32个方向(8个交叉路口和4个方向)与最近的两个方向具有对称连接,因此每个相邻方向的权重强度为0.5。在滞后2处,由于设置,每个方向具有不对称连接。对于32个方向中的每个方向,权重等于1/n,其中n是该滞后处的邻居数。
70.因此,该系统使用根据拓扑(空间)距离的加权机制来融合来自所有空间连接位置或交叉路口的时间(时间范围)预测。在空间上更接近预测交通流的位置或交叉路口的位置或交叉路口被赋予比更远的位置或交叉路口更高的权重。这种融合加权方案对于区域中的任意交叉路口配置是高效、轻量且可扩展的。所得到的权重随后用于任意时间范围内的全局时空预测。
71.时空道路交通流时间序列预测系统如图5中的503所示。该模块使用多元神经网络自回归器执行多步提前预测。该加权方案与各个非线性自回归神经网络预测结合在有外部输入的非线性自回归神经网络(narx)中,该网络能够同时生成对整个区域的任意时间范围交通流预测的预测。该机制类似于非线性自回归神经网络,通过回归一个位置的传感器时间序列与通过所学习的权重和用于多步预测的反馈回路连接到的其它位置之间的时间关系的函数来运行。这些机制可以通过相同的功能模块扩展到大规模的层次结构(即,城市中的区域)。该系统将时间(时间范围)预测与时空权重结合,以获得最终的时空(时间范围)预测,如504所示。
72.使用递归神经网络是为了实现根据时空相关多元输入(即,来自相邻交叉路口的多个时间序列)的多个时间序列的多步预测(即,对于任意时间范围)。
73.在一个示例中,神经网络是有外部输入的非线性自回归神经网络(narx),该输入
由以下等式定义:
74.y(t)=f(y(t-1),y(t-2),
…
,y(t-n)),x(t-1),x(t-2),
…
,x(t-n)),y
–
1d,x
–
nd,
ꢀꢀꢀ
(2)
75.其中,输出信号y(t)的下一个值根据输出信号的先前值和外部输入信号的先前值(空间相关时间序列)进行回归。通过以下方式实现narx模型:利用前馈神经网络逼近函数f,利用递归关系进行多步预测(即,任意时间范围:分钟、小时、天等)。
76.如图9所示,在训练阶段,向系统馈送在一段时间内记录的历史数据以及所学习的时空融合权重。在推理阶段,系统利用时间序列之间的时空相关性,输出每个道路交通流时间序列的期望(任意)预测值。
77.因此,系统使用递归来学习每个交叉路口的每个交通流与(空间上)相邻交叉路口的每个交通流之间的非线性时空相关性,以预测任意大小时间范围的交通流样本。系统通过考虑其它空间连接位置的影响及其自身的历史数据来预测每个位置或交叉路口的交通流时间序列,以获得每个位置的更准确的交通流预测。
78.上述所有组件在系统运行时协同工作,并对应于之前介绍的功能模块,如图10所示。现在将总结系统运行时间序列和相应功能模块(块)1001-1003的操作。
79.在模块1001中,通过使用能够通过递归关系提取时间依赖性的学习系统,根据历史数据1000计算单个时间序列的任意时间范围预测。在模块1002中,通过学习加权方案来利用位置之间的时空相关性。在模块1003中,通过使用能够通过递归关系提取时间相关性的学习系统,将时间范围预测与时空加权方案相结合,以根据来自多个时间序列的历史数据进行更精确的任意时间范围预测。可以并行执行多个时间序列的预测,从而支持分层表示(区域)。
80.因此,该系统提供了一种通过利用位置之间的时空相关性来预测多个位置的任意长时间范围内的道路交通流的方法。该系统能够通过在系统中嵌入空间知识,学习历史交通流时间序列中的时间相关性并学习在多个位置感测的道路交通之间的空间相关性,从而通过使用根据快速高效的计算的高效学习和时空相关性以及固定时间和资源预算,来实现道路交通流的精确多元预测(即,不需要在每个位置都安装摄像头)。
81.该系统可部署用于多种场景,不受位置、道路几何形状、大小和配置以及可用传感器的影响。空间布局可以直接嵌入并在融合模块502中使用,以确定改进的交通流时间序列预测的加权方案。因此,该系统能够以固定的资源预算执行快速高效的建模、表示、学习和预测。控制单元在内存、大小和计算方面属于资源轻量型系统。
82.本文所述的方法特别适用于交通优化,这需要建模、预测和快速适应传感器时间序列。如其模块化结构所示,该系统采用高效的单时间序列预测,能够嵌入并利用时空学习,以制定融合所有交通流时间序列的贡献的加权方案,从而在统一计算单元中进行更精确的单交叉时间序列预测。这种系统通过利用区域中所有可用交通流时间序列之间的所学习的时空相关性来减少在每个位置或交叉路口安装摄像头的需求,从而最大限度地降低成本。这些机制可以通过相同的功能模块扩展到大规模的层次结构(即,城市中的区域)。
83.图11(a)至图11(c)显示了对单个交叉路口的实际数据集执行的示例。图11(a)显示了时间序列的空间邻近度的建模。使用模型的空间滞后权重来确定具有特定相关方向的直连方向。例如,1n与1v、1e、1s和4s相连。图11(b)显示了使用时间相关性的单个交通流预测。系统根据时空相关的多元输入(即,多个时间序列,对于位于空间滞后1和2处的方向1v、
1e、1s和4s)对单个时间序列(即,方向1n)进行多步预测(即,未来一整天)。采用递归神经网络(narx),使得:
84.flow 1n(t)=f(flow1n(t-1),flow1n(t-2),
…
,flow1n(t-n),flowneighborslag1and2(t-1),flowneighborslag1and2(t-2),
…
,flowneighborslag1and2(t-n))
ꢀꢀꢀ
(3)
85.其中,flow1n是1d值,flowneighborslag1and2是空间滞后1和2处1n的邻居值的nd向量。输出信号flow1n(t)的下一个值根据flow1n信号的先前值和flowneighborslag1and2的先前值进行回归。通过以下方式实现narx模型:利用前馈神经网络逼近函数f,利用递归关系进行多步预测。图11(c)示出了改进的未来24小时预测的时空融合,该预测使用两天的历史数据(使用从第52天到第54天获取的数据)基于五个相邻方向,预测交叉路口处的第55天的交通。
86.为了强调系统的可扩展特性,图12介绍了利用各个交叉路口的时空相关性实现区域或城市级别预测的基本机制。为了将预测外推到区域,相同的神经网络预测器可以用于相关方向的任意设置。例如,考虑到整个地理设置,可以使用区域中组合方向的所有交通流的预测来计算24小时内的总区域交通流预测。该交通流可用于在starma解决方案的实时控制中创建计划和调整总周期。
87.图13示出了用于根据从多个传感器接收的数据预测道路交通流的方法的示例,其中每个传感器用于在相应交通位置获取道路交通数据。所述方法包括:在步骤1301中,从传感器接收数据。在步骤1302中,所述方法包括:实现机器学习算法,以根据接收的数据的时间序列学习第一位置处的交通流与传感器所在的其它位置处的交通流之间的关系的模型。在步骤1303中,所述方法包括:实现该模型,以根据从传感器接收的其它数据预测第一位置处的交通流的时间序列。
88.本文所述的系统可以包括处理器和非易失性存储器。该系统可以包括多个处理器和多个存储器。所述存储器可以存储可由所述处理器执行的数据。所述处理器可以用于根据以非瞬时形式存储在机器可读存储介质上的计算机程序运行。所述计算机程序可以存储用于使所述处理器按照本文描述的方式执行其方法的指令。这些组件可以在物理硬件中实现,也可以部署在各种边缘或云设备上。
89.该系统能够学习可支持交通拥堵缓解的交叉位置相关性(即,根据对交通状况的全局理解的预先局部决策)。该系统能够通过学习该位置的交通流动态来预测该位置的任意时间范围的交通流,并且还可以根据所学习的加权方案预测多个空间连接位置的交通流。该系统自动学习最适合交通传感器数据历史样本的基础数学关系,而无需任何关于基础统计和相关性的先验信息,以获得每个位置的更准确的交通流预测。利用这种计算,该系统能够通过从多个其它空间连接的位置推断某个位置的交通流来最小化交通控制系统的成本。因此,减少了普遍使用摄像头的需要。因此,该系统可以利用城市基础设施中固有的时空相关性来处理大规模城市级别城市群的多时间序列预测。
90.所提出的系统克服了根据微分方程、数值方法和经验方法的复杂解析流模型等资源消耗大、计算成本高且复杂的现有技术方法,具有有限数量的自由参数,在很大程度上依赖于从数据中提取这些参数,而无需系统设计者事先干预。
91.该系统的输出可以应用于交通控制单元,更新交通信号灯以最大化交通流。所提
出的单元可以同时处理来自多个传感器的数据。该系统由灵活的仪器支持,确保以低延迟、高传入事件率和固定资源预算进行更新。此外,该系统可以部署在任何类型的位置或交叉路口,无需预先训练,与交叉路口布局、大小和可用传感器的数量无关。这在降低部署成本方面提供了重大优势。
92.该系统结合了神经网络在有效表示时间序列方面表现出的学习能力以及高效的时空相关学习和融合机制。这种组合允许在任意时间范围内实时学习和重新学习。
93.该系统不断学习交通数据的时间相关性,利用来自不同传感器的道路交通时间序列之间的空间相关性,并适应变化以改进道路交通预测。这在交通流预测和控制中很重要,其中控制单元必须估计和适应数据分布的变化,并提供准确的预测和明智的控制动作,例如交通灯绿灯时间。因此,由该系统执行的简单操作也是有利的,因为当数据进入系统时,计算需要处理的时间跨度有限,资源分配和执行时间有限。
94.申请人在此单独公开了本文中描述的每个单独特征以及两个或多个此类特征的任何组合,在某种程度上,这样的特征或组合能够根据本领域技术人员的公知常识基于本说明书作为一个整体来执行,无论这些特征或特征的组合是否解决了本文公开的任何问题,并且不限制权利要求的范围。申请人指出,本发明的方面可以包括任何这样的单独特征或特征的组合。鉴于上述描述,本领域技术人员将明显地看到,在本发明的范围内可以进行各种修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1