用于无人驾驶飞行器防撞的装置和方法与流程
1.各种示例实施例涉及用于无人驾驶飞行器防撞的装置和方法。
背景技术:
2.无人驾驶飞行器(unmanned aerial vehicle,uav)或无人机(drone)可以是可移动的设备,例如安装了用户识别模块(subscriber identification module,sim)卡,使得uav可以连接到移动网络或电信网络,诸如4g、5g或未来将开发的网络,并且可以经由移动网络或电信网络由无人驾驶空中系统交通管理(unmanned aerial system traffic management,utm)控制。
3.utm是3gpp实体,负责包括例如uav的授权和交通管理的功能。为了使uav相互之间以及与少数飞机(诸如它们可能需要共享空域的低空飞行的直升机)之间保持隔离,utm提供基于准确的实时定位信息的无人驾驶飞行器防撞系统(unmanned aerial vehicle collision avoidance system,ucas)的服务,实时定位信息经由3gpp网络从uav连续进入utm,其具有如3gpp rel-16技术报告中建议的每秒1次更新的周期。
技术实现要素:
4.在第一方面,公开了一种方法。所述方法可包括:接收关于第一无人驾驶飞行器(uav)在第一跟踪区域(ta)中存在的第一信息;确定所述第一ta和相邻于所述第一ta的至少一个ta中的uav的第一数量;以及在所述第一数量为1的情况下,通知所述第一uav以第一频率发送实时定位信息。在一个示例实施例中,所述方法可以在utm侧执行,用于uav防撞。
5.在一些示例实施例中,所述方法可进一步包括:在所述第一数量大于1的情况下,通知所述第一uav以大于所述第一频率的第二频率发送所述实时定位信息。
6.在一些示例实施例中,所述方法可进一步包括:在所述第一数量大于1的情况下,通知除所述第一uav外的在所述第一ta和至少一个相邻ta中的其他一个或多个uav,以大于所述第一频率的第三频率发送所述实时定位信息。
7.在一些示例实施例中,所述第一信息指示所述第一uav从第二ta进入所述第一ta。
8.在一些示例实施例中,所述方法可以进一步包括:在第二uav处于相邻于所述第二ta的第三ta内的情况下,确定所述第三ta和相邻于所述第三ta的至少一个ta中的uav的第二数量;以及在所述第二数量为1的情况下,通知所述第二uav以所述第一频率发送所述实时定位信息。
9.在一些示例实施例中,所述第一频率可以具有指示停止发送实时定位信息的零值。
10.在一些示例实施例中,所述方法可进一步包括:分别从相同ta或两个相邻ta中的两个uav接收第一实时定位信息和第二实时定位信息;基于所述第一实时定位信息和所述第二实时定位信息来估计所述两个uav之间的碰撞风险;以及在所述风险高于阈值的情况下向所述两个uav中的至少一个发布路线变更命令。
11.在一些示例实施例中,每个uav可以是经由核心网络与无人驾驶空中系统交通管理进行通信的移动使能设备。
12.在一些示例实施例中,所述第一信息可以经由所述核心网络从所述第一uav接收。
13.在一些示例实施例中,在所述第一uav移动到所述第一ta的情况下,可以从所述核心网络接收所述第一信息。
14.在一些示例实施例中,每个ta可以包括电信网络中的一个或多个小区。
15.在一些示例实施例中,相邻于所述第一ta的所述至少一个ta可以包括直接和/或间接相邻于所述第一ta的至少一个ta。
16.在第二方面,公开了一种装置。所述装置可包括至少一个处理器以及包括计算机程序代码的至少一个存储器,所述至少一个存储器和所述计算机程序代码配置为,与所述至少一个处理器一起,使所述装置至少执行上述方法。
17.在一些示例实施例中,所述装置可以是无人驾驶空中系统交通管理服务器的至少一部分,并且每个uav是经由核心网络与无人驾驶空中系统交通管理服务器通信的移动使能设备。
18.在第三方面,公开了一种装置。所述装置可包括:第一电路,配置为接收关于第一ta中第一uav存在的第一信息;第二电路,配置为确定所述第一ta和与所述第一ta相邻的至少一个ta中uav的第一数量;以及第三电路,配置为在所述第一数量为1的情况下,通知所述第一uav以第一频率发送实时定位信息。
19.在一些示例实施例中,所述装置中的所述第三电路可进一步配置为在所述第一数量大于1的情况下,通知所述第一uav以大于所述第一频率的第二频率发送所述实时定位信息。
20.在一些示例实施例中,所述装置中的所述第三电路可以进一步配置为在所述第一数量大于1的情况下,通知除所述第一uav外的在所述第一ta和至少一个相邻ta中的其他一个或多个uav,以大于所述第一频率的第三频率发送所述实时定位信息。
21.在一些示例实施例中,所述第一信息可以指示所述第一uav从第二ta进入所述第一ta。
22.在一些示例实施例中,所述装置中的所述第二电路可以进一步配置为,在第二uav处于相邻于所述第二ta的第三ta内的情况下,确定所述第三ta和相邻于所述第三ta的至少一个ta中的uav的第二数量;以及所述装置中的第三电路可以进一步配置为,在所述第二数量为1的情况下,通知所述第二uav以所述第一频率发送所述实时定位信息。
23.在一些示例实施例中,所述第一频率可以具有指示停止发送实时定位信息的零值。
24.在一些示例实施例中,所述装置可进一步包括:第四电路,配置为分别从相同ta或两个相邻ta中的两个uav接收第一实时定位信息和第二实时定位信息;第五电路,配置为基于所述第一实时定位信息和所述第二实时定位信息来估计两个uav之间的碰撞风险;以及第六电路,配置为在所述风险高于阈值的情况下向所述两个uav中的至少一个发布路线变更命令。
25.在一些示例实施例中,所述装置可以是无人驾驶空中系统交通管理服务器的至少一部分,每个uav是经由核心网络与无人驾驶空中系统交通管理服务器通信的移动使能设
备。
26.在一些示例实施例中,所述第一信息可以经由所述核心网络从所述第一uav接收。
27.在一些示例实施例中,在所述第一uav移动到所述第一ta的情况下,所述第一信息可以从所述核心网络接收。
28.在一些示例实施例中,每个ta可以包括电信网络中的一个或多个小区。
29.在第四方面,公开了一种由uav执行的方法。所述方法可包括:接收关于发送实时定位信息的频率的信息;以及基于所述接收的信息控制所述实时定位信息的发送。
30.在一些示例实施例中,在所述频率具有零值的情况下,可以停止所述实时定位信息的发送。
31.在一些示例实施例中,所述方法可进一步包括:发送指示所述uav从第二跟踪区域进入第一跟踪区域的信息。
32.在一些示例实施例中,每个跟踪区域可以包括电信网络中的一个或多个小区。
33.在一些示例实施例中,所述uav可以是经由核心网络与无人驾驶空中系统交通管理服务器通信的移动使能设备。
34.在第五方面,公开了一种uav。所述uav可包括至少一个处理器和包括计算机程序代码的至少一个存储器,所述至少一个存储器和所述计算机程序代码配置为,与所述至少一个处理器一起,使所述uav在所述uav一侧执行至少上述方法。
35.在第六方面,公开了一种uav。所述uav可包括:第一电路,配置为接收关于用于发送实时定位信息的频率的信息;以及第二电路,配置为基于所述接收的信息来控制所述实时定位信息的发送。
36.在一些示例实施例中,所述uav中的所述第二电路可配置为在频率具有零值的情况下停止实时定位信息的发送。
37.在一些示例实施例中,所述uav可进一步包括:第三电路,配置为发送指示所述uav从第二跟踪区进入第一跟踪区的信息。
38.在一些示例实施例中,每个ta可以包括电信网络中的一个或多个小区。
39.在一些示例实施例中,所述uav可以是经由核心网络与无人驾驶空中系统交通管理服务器通信的移动使能设备。
40.在第七方面,公开了一种方法。所述方法可以包括确定在第一ta中第一uav的存在;以及发送关于所述第一ta和第二ta的第一信息,所述第一uav从所述第二ta进入所述第一ta。例如,所述方法可以在核心网络一侧执行。
41.在一些示例实施例中,所述第一信息从所述核心网络发送到无人驾驶空中系统交通管理服务器。
42.在一些示例实施例中,每个ta可以包括电信网络中的一个或多个小区。
43.在第八个方面,公开了一种装置。所述装置可包括至少一个处理器和包括计算机程序代码的至少一个存储器,所述至少一个存储器和所述计算机程序代码配置为,与所述至少一个处理器一起,使所述装置执行确定在第一ta中第一uav的存在,并且发送关于所述第一ta和第二ta的第一信息,所述第一uav从所述第二ta进入所述第一ta。
44.在一些示例实施例中,所述第一信息可以被发送到无人驾驶空中系统交通管理服务器。
45.在一些示例实施例中,每个ta可以包括电信网络中的一个或多个小区。
46.在一些示例实施例中,所述装置可以是核心网络的至少一部分。
47.在第九个方面,公开了一种计算机可读介质。所述计算机可读介质可包括:存储在其上的指令,用于使装置或uav执行上述方法中的至少任何一项。
48.在第十方面,公开了一种系统。所述系统可包括:至少一个上述uav,其包括第一uav;以及用于uav交通管理的上述装置。所述装置可配置为,响应于接收关于在第一跟踪区域(ta)中所述第一uav存在的第一信息,在所述第一ta和与所述第一ta相邻的至少一个ta中的uav的第一数量为1的情况下,通知所述第一uav以第一频率发送实时定位信息。所述第一uav可配置为基于来自所述装置的关于以所述第一频率发送实时定位信息的通知来控制所述实时定位信息的发送。
49.在一些示例实施例中,在所述系统中,所述装置可以进一步配置为在所述第一数量大于1的情况下,通知所述第一uav以大于所述第一频率的第二频率发送所述实时定位信息。
50.在一些示例实施例中,在所述系统中,所述装置可以进一步配置为在所述第一数量大于1的情况下,通知除所述第一uav外的在所述第一ta和所述至少一个相邻ta中的其他一个或多个uav,以大于所述第一频率的第三频率发送所述实时定位信息。
51.在一些示例实施例中,在所述系统中,所述第一信息可指示所述第一uav从第二ta进入所述第一ta。
52.在一些示例实施例中,在所述系统中,所述装置可以进一步配置为在所述第二uav处于相邻于所述第二ta的第三ta内,并且在所述第三ta和相邻于所述第三ta的至少一个ta内的uav的第二数量为1的情况下,通知所述至少一个uav以所述第一频率中发送所述实时定位信息。
53.在一些示例实施例中,在所述系统中,所述第一uav可配置为在所述第一频率具有零值的情况下停止所述实时定位信息的发送。
54.在一些示例实施例中,在所述系统中,所述装置可以是无人驾驶空中系统交通管理服务器的至少一部分,并且所述至少一个uav中的每一个可以是经由核心网络与所述装置通信的移动使能设备。
55.在一些示例实施例中,在所述系统中,每个ta可以包括电信网络中的一个或多个小区。
56.在一些示例实施例中,在所述系统中,所述第一信息可以经由所述核心网络从所述第一uav接收。
57.在一些示例实施例中,在所述系统中,在所述第一uav移动到所述第一ta的情况下,所述第一信息可以从所述核心网络接收。
58.在一些示例实施例中,所述系统可进一步包括所述核心网络的设备,所述设备配置为确定在所述第一ta中所述第一uav的存在,并发送关于所述第一ta和所述第二ta的第一信息,所述第一uav从所述第二ta进入所述第一ta。
59.在一些示例实施例中,相邻于所述第一ta的所述至少一个ta可以包括直接和/或间接相邻于所述第一ta的至少一个ta。
附图说明
60.现在将参考附图通过非限制性示例来描述一些示例实施例。
61.图1示出了根据一示例实施例的示例场景。
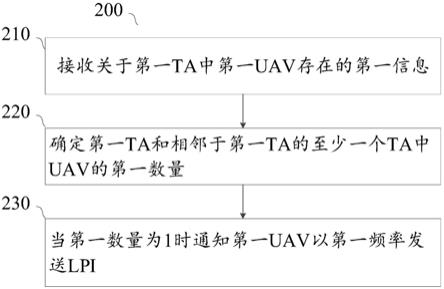
62.图2示出了根据一示例实施例,用于utm侧的uav防撞的示例方法。
63.图3示出了图2中示例方法的执行示例。
64.图4示出了图2中示例方法的另一执行示例。
65.图5示出了根据示例实施例,用于utm侧的uav防撞的另一示例方法。
66.图6示出了图5中示例方法的另一执行示例。
67.图7示出了根据一示例实施例,用于utm侧的uav防撞的另一示例方法。
68.图8示出了根据一示例实施例,用于utm侧的uav防撞的另一示例方法。
69.图9示出了图8中示例方法的另一执行示例。
70.图10示出了根据一示例实施例,用于utm侧的uav防撞的另一示例方法。
71.图11示出了根据一示例实施例,用于utm侧的uav防撞的示例装置。
72.图12示出了根据一示例实施例,用于utm侧的uav防撞的另一示例装置。
73.图13示出了根据一示例实施例,用于utm侧的uav防撞的另一示例装置。
74.图14示出了根据一示例实施例,用于utm侧的uav防撞的示例方法。
75.图15示出了根据一示例实施例的示例uav。
76.图16示出了根据一示例实施例的另一示例uav。
77.图17示出了根据一示例实施例,在cn侧上执行的一示例性方法。
78.图18示出了根据一示例实施例,在cn侧上执行的一示例性装置。
79.图19示出了根据一示例实施例,系统中的示例通信的一部分。
80.图20示出了根据一示例实施例,系统中的示例通信的一部分。
81.图21示出了根据一示例实施例,系统中的示例通信的一部分。
82.图22示出了根据一示例实施例,系统中的示例通信的一部分。
83.图23示出了根据一示例实施例,相邻ta的示例。
具体实施方式
84.图1示出了示例场景100,其中uav 110可例如通过包括合适的电信模块或电路(诸如sim卡111)用作移动使能设备或空中用户设备(ue),并可经由移动网络或电信网络的核心网络(cn)130(诸如4g,5g或待开发的网络)、或任何其他合适的移动网络或电信网络,与位于空中交通管制机构(atac)的utm服务器120通信。
85.在示例场景100中,预定用于uav 110的路线140可以跨越一个或多个跟踪区域(ta),例如ta150、160和170,如图1所示。
86.ta是小区级别的配置,用于ue(诸如作为空中ue的uav 110)的位置管理。移动网络或电信网络覆盖的区域可划分为一个或多个ta,诸如图1中的ta150、160和170,其中一个ta可包括或覆盖移动网络或电信网络中的一个或多个小区,一个小区可属于一个ta。每个ta可以与包括跟踪区域代码(tracking area code,tac)的跟踪区域身份(tracking area identity,tai)相关联,其可以与小区的系统信息(sib1)一起广播。例如,tai可以包括公共陆地移动网络(public land mobile network,plmn)的代码和tac。例如,tai可以包括移动
navigation satellite system,gnss)获得的uav位置的信息,或指示uav的绝对位置或相对位置的任何其他合适的信息。gnss的各种示例可以包括但不限于全球定位系统(gps)、伽利略(galileo)、格洛纳斯(glonass)、星基增强系统(space based augmentation systems,sbas)、准天顶卫星系统(quasi zenith satellite system,qzss)和北斗导航卫星系统(beidou navigation satellite system,bds)。
96.在一些示例实施例中,第一频率可以是任何合适的频率,例如低于3gpp rel-16技术报告中建议的提供lpi的频率(即,每秒1次更新的周期),例如,每分钟1次更新的周期、每5分钟1次更新的周期、每10分钟1次更新的周期,甚至可以具有指示停止发送lpi的零值。另外,第一频率可以不限于均匀或线性。例如,第一频率可以是可变的,例如,可以是在第一分钟一次,在第二分钟两次等。
97.图3示出了第一uav 110通电并在第一ta 310中起飞的示例场景。在这种情况下,uav 110可以向utm服务器120发送包括第一ta 310的tai的第一信息。
98.响应于步骤210处接收关于在第一ta 310中uav 110存在的第一信息,可以在步骤220在utm服务器120一侧确定在ta 310和相邻ta 320-370中的uav的第一数量。
99.如果确定的第一数量是1,如图3所示,那么示例方法200可以进入步骤230,并通知第一uav 110停止发送lpi,或以低频率发送lpi,例如,每5分钟1次更新。
100.图4中示出了另一个示例场景,其中第一uav 110从例如第二ta 450进入第一ta 410。在这种情况下,uav 110可以向utm服务器120发送包括第一ta 410的tai的第一信息。例如,第一信息也可以包括第二ta 450的tai。
101.响应于在步骤210处接收第一信息,在步骤220处可以在utm服务器120一侧确定在第一ta 410和相邻ta 420-470中的uav的第一数量。当第一数量为1时,如图4所示,示例方法200可进入步骤230并通知第一uav110停止发送lpi,或以第一频率发送lpi。在一示例实施例中,utm服务器120可以记录关于uav 110是否已经处于以第一频率发送lpi的状态的信息,并且通知的步骤230可以通过在检测到第一uav 110处于以第一频率发送lpi的状态时不执行动作来实施。
102.如图3和图4的示例所示,根据示例方法200,utm服务器120可以响应于经由cn 130从第一uav接收第一信息而检测在第一ta和第一ta的一个或多个相邻ta中的uav的数量。当检测到的数量为1时,utm服务器120可以确定没有碰撞风险或碰撞风险低,而不需要例如通过考虑两个uav的速度、方向或轨迹来计算两个uav之间的欧氏距离(euclidean distance),并且可以通知第一uav以第一频率发送lpi,第一频率可以低于例如3gpp rel-16技术报告中建议的连续提供lpi的频率,或者甚至停止发送lpi。为此,例如,utm的流量和工作负荷可以显著减少。
103.在一示例实施例中,如图5所示,示例方法200可进一步包括步骤510,当第一数量大于1时,通知第一uav以大于第一频率的第二频率发送lpi。
104.例如,如图6所示,当第一uav 110进入第一ta 610时,uav 110可以向utm服务器120发送第一信息,第一信息包括第一ta 610的tai。
105.响应于接收第一信息,可以在步骤220在utm服务器120一侧确定在第一ta 610和相邻ta 620-670中的uav的第一数量。
106.如图6所示,在ta 620中有一个uav 860,使得第一数量变成2,其大于1。在这种情
况下,示例方法200可以进行到步骤510,通知第一uav 110定期发送lpi,或者以大于第一频率的第二频率发送lpi。例如,第二频率可以是3gpp rel-16技术报告中建议的用于提供lpi的频率,即每秒1次更新的周期,或者甚至更高,例如,每秒2次更新的周期等。第二频率可以不限于均匀或线性。例如,第二频率可以是可变的,例如,可以是第一秒一次,第二秒两次等。
107.进一步地,如图7所示,在另一示例实施例中,示例方法200可以进一步包括步骤710,在第一数量大于1的情况下,通知除第一uav外的在第一ta和一个或多个相邻ta中的其他一个或多个uav,以大于第一频率的第三频率发送lpi。例如,第三频率可以是用于提供如3gpp rel-16技术报告中建议的lpi的频率,即每秒1次更新的周期,或者甚至更高,例如每秒2次更新的周期等。例如,第三频率可以与第二频率相同或不同。另外,第三频率可以不限于均匀或线性。例如,第三频率可以是可变的,例如,可以是第一秒一次,第二秒两次等。
108.例如,如图6所示,如果例如由于在utm服务器120一侧为uav 610执行的步骤210、220和230,ta 620中的uav 680在uav 110进入ta 170之前,没有周期性地发送lpi、或者以第一频率发送lpi到utm,那么在步骤710处utm服务器120可以通知uav 680在第一uav 110进入第一ta 610之后以第三频率发送lpi。
109.当在一个ta或两个相邻的ta中至少有两个uav时,存在至少两个uav之间的碰撞风险。通过图5中的步骤510和图7中的步骤710,可以使任何有碰撞风险的两个uav能够连续地向utm服务器120提供lpi,使得utm服务器120基于精确的lpi提供ucas服务。
110.作为例子,步骤710在图7中示为在步骤510之后执行。在另一示例实施例中,步骤710可以在步骤510之前或与之并行执行。在另一示例实施例中,步骤710和510可以合并为一个步骤。
111.进一步地,如图8所示,在另一示例实施例中,响应于或在接收到指示第一uav从第二ta进入第一ta的第一信息的步骤210之后,示例方法200可以进一步包括:步骤810,确定相邻于第二ta的第三ta和相邻于第三ta的一个或多个ta中的uav的第二数量,其中第三ta内存在第二uav;以及步骤820,在第二数量为1时,通知第二uav以第一频率发送lpi。
112.例如,如图9所示,当第一uav 110从例如第二ta 950移动到第一ta 980时,在第三ta 910中有一个第二uav 990。在这种情况下,uav 110可以向utm 120服务器发送第一信息,第一信息包括第一ta 980的tai和第二ta 910的tai。
113.响应于在步骤210处接收的第一信息,可以在步骤810在utm 120服务器一侧确定在第三ta 910和相邻ta 920-970中的uav的第二数量。
114.如图9所示,在ta 910-970中,有一个uav,即第二uav 990,也就是说,第二个数字是1。因此,示例方法200可以进行到步骤820并通知第二uav 990停止周期性地发送lpi、或以第一频率发送lpi。为此,例如,utm流量和工作负荷可以进一步减少。
115.图10示出了图2、图5、图7和图9的示例组合。然而,本技术并不限于上述示例。
116.通过根据各种示例实施例的示例方法200,可以通知或控制uav,至少是第一uav,停止周期性地提供lpi;或者当在相同ta和任何相邻ta中都没有发现其他uav时,以第一频率提供lpi;或者当在相同ta或任何相邻ta中发现有至少一个其他uav时,以高于第一频率的频率提供lpi,而不是以第二或第三频率连续向utm提供lpi。在utm服务器一侧,例如,至少可以减少对两个uav之间的欧氏距离的计算,从而可以减少utm流量和工作负荷。
117.对于具有分离损失风险的那些uav,例如在相同ta或相邻ta的那些uav,示例方法200可以进一步包括分别从相同ta或两个相邻ta中的两个uav接收第一实时定位信息和第二实时定位信息,基于第一实时定位信息和第二实时定位信息来估计两个uav之间的碰撞风险,以及当风险高于阈值时向两个uav中的至少一个发布路线变更命令。这些步骤可以例如在步骤510和/或步骤710之后执行,并且对于以大于第一频率的频率发送lpi的任何两个或更多个uav执行。
118.图11示出了根据一示例实施例的示例装置1100,其例如可以是utm服务器120的至少一部分。
119.如图11所示,示例装置1100可以包括至少一个处理器1110和可以包括计算机程序代码1130的至少一个存储器1120。至少一个存储器1120和计算机程序代码1130可以配置为,与至少一个处理器1110一起,使装置1100至少执行上述示例方法200。
120.在各种示例实施例中,示例装置1100中的至少一个处理器1110可以包括但不限于至少一个硬件处理器,其包括诸如中央处理单元(cpu)的至少一个微处理器、至少一个硬件处理器的一部分、以及诸如基于例如现场可编程门阵列(fpga)和专用集成电路(asic)开发的那些任何其他合适的专用处理器。此外,至少一个处理器1110还可以包括图11中未示出的至少一个其他电路或元件。
121.在各种示例实施例中,示例装置1100中的至少一个存储器1120可以包括各种形式的至少一个存储介质,诸如易失性存储器和/或非易失性存储器。易失性存储器可以包括但不限于,例如,随机存取存储器(ram)、高速缓存等。非易失性存储器可以包括但不限于,例如只读存储器(rom)、硬盘、闪存等。此外,至少存储器1120可以包括但不限于电、磁、光、电磁、红外或半导体系统、装置或设备或上述的任何组合。
122.此外,在各种示例实施例中,示例性装置1100还可以包括至少一个其他电路、元件和接口,例如至少一个i/o接口、至少一个天线元件等。
123.在各种示例实施例中,包括至少一个处理器1110和至少一个存储器1120的示例装置1100中的电路、部件、元件和接口,可以经由任何合适的连接(包括但不限于总线、交叉开关、布线和/或无线线路)以任何合适的方式(例如电、磁、光、电磁等)耦接在一起。
124.图12示出了根据一示例实施例的另一示例装置1200,其例如可以是utm服务器120的至少一部分,并且可以包括耦接在一起并配置为执行例如示例方法200的电路。
125.贯穿本技术的术语“电路”可以指以下的一个或多个或全部:(a)仅硬件的电路实现方式(诸如仅以模拟和/或数字电路的实现方式);(b)硬件电路和软件的组合,例如(如适用)(i)模拟和/或数字硬件电路与软件/固件的组合以及(ii)硬件处理器与软件的任何部分(包括数字信号处理器)、软件和存储器,它们一起工作以使诸如移动电话或服务器之类的设备执行各种功能);(c)需要软件(例如,固件)来进行运行的硬件电路和/或处理器,诸如微处理器或微处理器的一部分,但该软件在不需要运行时可能不存在。电路的此定义适用于本技术中(包括任何权利要求中)该术语的一种或全部用途。作为另外的示例,如本技术中所使用的,术语“电路”还涵盖仅硬件电路或处理器(或多个处理器)或硬件电路或处理器及其(或它们)随附软件和/或固件的一部分的实现。例如并且在适用于权利要求要素的情况下,术语电路还涵盖用于移动设备的基带集成电路或处理器集成电路,或者服务器、蜂窝网络装置或其他计算或网络装置中的类似集成电路。
126.如图12所示,示例装置1200可以包括:电路1210,其配置为接收关于在第一ta中第一uav存在的第一信息(即执行示例方法200的步骤210);电路1220,其配置为确定第一ta和相邻于第一ta的一个或多个ta中的uav的第一数量(即执行示例方法200的步骤220);以及电路1230,其配置为在第一数量为1时通知第一uav以第一频率发送实时定位信息(即执行示例方法200的步骤230)。
127.在一示例实施例中,电路1230可以进一步配置为当第一数量大于1时,通知第一uav以大于第一频率的第二频率发送实时定位信息(即执行示例方法200的步骤510)。
128.在一示例实施例中,电路1230可以进一步配置为在第一数量大于1的情况下,通知除第一uav外的在第一ta和相邻一个或多个ta中的其他一个或多个uav,以大于第一频率的第三频率发送实时定位信息(即执行示例方法200的步骤710)。
129.在一示例实施例中,电路1220可以进一步配置为当第二uav在相邻于第二ta的第三ta内时,确定第三ta和相邻于第三ta的一个或多个ta中的uav的第二数量(即执行示例方法200的步骤810),并且电路1230进一步配置为当第二数量为1时,通知第二uav以第一频率发送实时定位信息(即执行示例方法200的步骤820)。
130.在一示例实施例中,如图13所示,示例性装置1200可以进一步包括:电路1310,其配置为分别从相同ta或两个相邻ta中的两个uav接收第一实时定位信息和第二实时定位信息;电路1320,其配置为基于第一实时定位信息和第二实时定位信息来估计两个uav之间的碰撞风险;以及电路1330,其配置为在风险高于阈值时向两个uav中的至少一个发布路线变更命令。
131.可以理解的是,用于本技术的utm一侧的uav防撞装置并不限于上述示例。
132.图14示出了根据一示例实施例的用于uav防撞的示例方法1400,其可由uav(例如上述示例中的第一uav)执行。
133.如图14所示,示例方法1400可以包括接收关于发送lpi的频率的信息的步骤1410,以及基于接收的信息控制lpi的发送的步骤1420。对应于示例方法200,用于发送lpi的频率可以是从utm通知的频率,例如,上述第一、第二或第三频率。例如,如果频率是具有零值的第一频率,那么uav可以停止发送lpi。
134.对应于示例方法200的步骤210,示例方法1400可以进一步包括发送指示uav从第二ta进入第一ta的信息。该步骤可以在步骤1410和/或步骤1420之前或之后或与之并行执行。
135.图15示出了根据一示例实施例的uav 1500,其可以用作移动使能设备或空中ue,例如安装有sim卡。
136.如图15所示,示例uav1500可以包括至少一个处理器1510和包括计算机程序代码1530的至少一个存储器1520。至少一个存储器1520和计算机程序代码1530可以配置为,与至少一个处理器1510一起,使uav 1500至少执行上述示例方法1400。
137.在各种示例实施例中,示例性uav 1500中的至少一个处理器1510可以包括但不限于至少一个硬件处理器,其包括诸如cpu的至少一个微处理器、至少一个硬件处理器的一部分、以及诸如基于例如fpga和asic开发的那些任何其他合适的专用处理器。此外,至少一个处理器1510还可以包括图15中未示出的至少一个其他电路或元件。
138.在各种示例实施例中,示例uav1500中的至少一个存储器1520可以包括各种形式
的至少一个存储介质,诸如易失性存储器和/或非易失性存储器。易失性存储器可以包括但不限于,例如,ram、高速缓存等。非易失性存储器可以包括但不限于,例如,rom、硬盘、闪存等。此外,至少存储器1520可以包括但不限于电、磁、光、电磁、红外、或半导体系统、装置或设备或上述的任何组合。
139.此外,在各种示例实施例中,示例性uav 1500还可以包括至少一个其他电路、元件和接口,例如至少一个i/o接口、至少一个天线元件等。
140.在各种示例实施例中,包括至少一个处理器1510和至少一个存储器1520的示例uav 1500中的电路、部件、元件和接口,可以经由任何合适的连接(包括但不限于总线、交叉开关、布线和/或无线线路)以任何合适的方式(例如电、磁、光、电磁等)耦接在一起。
141.图16示出了根据一示例实施例的另一示例uav 1600,其可以包括耦接在一起并配置为执行示例方法1400的电路。
142.如图16所示,示例uav1600可以包括:电路1610,其配置为接收关于用于发送实时定位信息的频率的信息(即,执行示例方法1400的步骤1410);以及电路1620,其配置为基于接收的信息控制实时定位信息的发送(即,执行示例方法1400的步骤1420)。在另一示例实施例中,对应于utm一侧的操作,例如,示例性方法200的步骤210,示例uav 1600可以进一步包括配置为发送指示uav从第二ta进入第一ta的信息的电路。
143.根据上述示例实施例的uav或配置为执行根据上述实施例的示例方法1400的uav可以使得能够基于来自utm服务器的通知/指令,以不同的频率提供lpi、或者甚至停止周期性地提供lpi,这可以包括停止通过gnss获得lpi。例如,降低提供lpi的频率或甚至停止提供lpi可有助于通过节省电力来增加uav的耐久性。
144.在上述一个或多个示例实施例中,第一信息由第一uav通过cn发送至utm服务器。在另一示例实施例中,第一信息可以由cn发送。例如,当cn确定uav的ta改变时,cn可以将指示uav的第一和第二ta的第一信息发送到utm服务器。
145.图17示出了根据一示例实施例的cn 130一侧的示例方法1700。如图17所示,示例方法1700可以包括步骤1710,其例如基于来自uav的ta附接/注册请求或tau请求或注册更新请求、或uav的ta切换等,确定在第一ta中第一uav的存在。如图17所示,示例方法1700可以进一步包括步骤1720,其发送关于第一ta和第二ta的第一信息,第一uav从第二ta进入第一ta。
146.图18示出了根据一示例实施例的cn 130一侧的示例装置1800。如图18所示,示例装置1800可以包括至少一个处理器1810和包括计算机程序代码1830的至少一个存储器1820。至少一个存储器1820和计算机程序代码1830可以配置为,与至少一个处理器1810一起,使示例装置1800至少执行上述示例方法1700。
147.此外,所述的示例装置和示例性uav可以包括在根据示例实施例的系统中。例如,该系统可以包括:至少一个上述uav,其例如包括上述第一uav;以及上述用于uav交通管理的装置,其可以至少是utm服务器120的一部分,例如示例装置1100或1200。在另一个示例中,该系统可以进一步包括核心网络的设备,例如示例装置1700。
148.图19示出了根据一示例实施例的系统中至少一个uav与装置(例如,utm服务器120)的第一uav(例如,第一uav 110)之间的通信的示例过程。
149.如图19所示,当第一uav 110进入第一ta时,第一uav 110可以经由cn 130向utm服
务器120发送第一信息。
150.然后,在utm服务器120一侧,响应于在示例方法200的步骤210处从cn 130接收第一信息,可以执行示例方法200的步骤220,并且如果第一数量是1,那么可以在示例方法200的步骤230处经由cn 130通知uav 110以第一频率发送lpi。
151.然后,在uav 110一侧,响应于在示例方法1400的步骤1410处接收以第一频率发送lpi的通知,在示例方法1400的步骤1420处uav 110可以基于接收的信息控制lpi的发送。例如,当第一频率具有零值时,uav 110可以停止经由cn 130向utm服务器120提供lpi。
152.图20示出了根据一示例实施例的系统中除第一uav 110外的另一uav与装置(例如,utm服务器120)之间的通信的另一个示例过程,其中另一uav可以在第一ta或相邻ta中。
153.与图19中的示例不同,在示例方法200的步骤220处,utm服务器120确定第一数量大于1。然后,如图20所示,在utm服务器120一侧,可以执行示例方法200的步骤510和710,以便通知第一uav和其他uav以大于第一频率的第三频率发送lpi。
154.然后,在第一ta或相邻ta中的第一uav和其他uav的一侧,lpi可经由cn 130以指示的第三频率连续提供给utm服务器120。
155.图21中示出了根据一示例实施例的系统中上述第二uav(例如,图9中990的uav)和装置(例如,utm服务器120)之间的通信的另一个示例过程。
156.如图21所示,在utm服务器120一侧,响应于在示例方法200的步骤210处从第一uav 110接收第一信息,可以执行示例方法200的步骤810。当在步骤810中确定的第二数字为1时,可以在示例方法200的步骤820处向第二uav 990发送通知,以便指示第二uav 990以第一频率发送lpi。
157.然后,在uav 610一侧,响应于在示例方法1400的步骤1410处接收以第一频率发送lpi的通知,uav 110可以基于在示例方法1400的步骤1420处接收的信息来控制lpi的发送。例如,如果第一频率具有零值,那么uav 990可以停止经由cn 130向utm服务器120提供lpi。
158.在如图19-21所示的示例过程中,第一uav 110负责发送第一信息。如上所述,该系统还可以包括cn 130的设备,其可以负责将第一信息发送到utm服务器120。图22中示出了这种情况下的通信的示例过程。
159.如图22所示,cn 130的设备可以在示例方法1700的步骤1710处确定在第一ta中第一uav的存在。例如,当cn 130的设备确定第一uav从第二ta进入第一ta时,它可以在示例方法1700的步骤1720处发送指示第一ta和第二ta的第一信息到utm服务器120。
160.然后,响应于接收第一信息,utm服务器120可以执行类似于图19中那些的操作。
161.可以理解的是,系统中实体之间的通信过程不限于上述示例。
162.另一个示例实施例可涉及计算机程序代码或指令,其可使装置(例如,utm服务器120的至少一部分)或uav执行上述的至少相应方法。
163.另一示例实施例可与具有存储在其上的这种计算机程序代码或指令的计算机可读介质相关。在各种示例实施例中,这种计算机可读介质可以包括诸如易失性存储器和/或非易失性存储器的各种形式的至少一种存储介质。易失性存储器可以包括但不限于例如随机存取存储器(ram)、高速缓存等。非易失性存储器可以包括但不限于只读存储器(rom)、硬盘、闪存等。
164.虽然以uav为例描述了各种示例实施例,但本技术的防撞的解决方案也可应用于
任何其他类型的移动使能设备,诸如车辆和机器人。
165.此外,虽然上文以第一ta和直接与第一ta相邻的一个或多个ta为例描述了各种示例实施例,但如上所述,第一ta和一个或多个ta可以是直接或间接地相邻。也就是说,uav的数量可以在更大的区域内确定。
166.例如,如图23所示,对于ta 2320中的uav 2310,例如在uav 2310对应于第一uav的示例方法200的上述步骤220中,或者在uav 2310对应于第二uav的示例方法200的上述步骤810中,可以确定ta 2320中的uav、直接与ta 2320相邻的ta 2330-2336、以及间接与ta 2320相邻的ta 2340-2345的数量。然后,如果确定的数字是1,可以通知uav 2310以第一频率发送lpi,或者甚至如果第一频率具有零值,那么停止发送lpi。
167.此外,在各种示例实施例中的跟踪区域可以是与当前跟踪区域配置可以至少具有类似功能/特征的区域,例如,基于无线接入网的通知区域(rna)或用于当前或未来ue的位置管理的任何其他合适的区域。
168.除非上下文清楚地另外要求,否则在整个说明书和权利要求书中,词语“包括”、“包含”等应以包括性含义来解释,而不是排他性或穷举性;也就是说,在“包括但不限于”的意义上。如本文中通常使用的,术语“耦接”是指可直接连接,或通过一个或多个中间元件连接的两个或多个元件。同样地,如本文中通常使用的,术语“连接”是指可直接连接或通过一个或多个中间元件连接的两个或多个元件。另外,当在本技术中使用时,词语“本文”、“上文”、“下文”和类似含义的词语应整体上指本技术,而不是指本技术的任何特定部分。在上下文允许的情况下,在描述中使用单数或复数的词也可分别包括复数或单数。词语“或”指的是两个或多个项目的列表,该单词涵盖该词语的以下所有解释:列表中的所有项目、列表中的任何项目以及列表中的项目的任何组合。
169.此外,本文中使用的条件语言,诸如“可”、“可以”、“可能”、“能够”、“例如”、“例”、“诸如”等,除非否则以其他方式具体说明,或者在所使用的上下文中以其他方式理解,通常旨在传达某些实施例包括而某些实施例不包括某些特征、元素和/或状态。因此,这种条件语言通常不旨在特征、元素和/或状态以任何方式对于一个或多个实施例是必需的,或者一个或多个实施例必然在具有或不具有作者输入或提示的情况下,包括用于确定这些特征、元素和/或状态在任何特定实施例中被包括或将被执行的逻辑。
170.尽管已经描述了一些实施例,但是这些示例实施例已经通过示例的方式给出,并且不旨在限制本公开的范围。实际上,本文描述的装置、方法和系统可以多种其他形式来体现。此外,在不脱离本公开的精神的情况下,可对本文所述的方法和系统的形式进行各种省略、替换和改变。例如,尽管以给定的布置来呈现框,但是替代实施例可执行具有不同部件和/或电路拓扑的类似功能,并且可删除,移动,添加,细分,组合和/或修改一些框。这些框中的每个可以以各种不同的方式来实现。这些框的顺序也可更改。可将上述各种实施例的元素和动作的任何适当组合进行组合以提供其他实施例。所附权利要求及其等同物旨在覆盖将落入本技术的范围和精神内的这些形式或修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1