乘客门的自动化打开的制作方法
[0001]
本发明涉及一种用于通过控制设备打开可自动化地运行的车辆的乘客门的方法。此外,本发明涉及一种控制设备、一种计算机程序以及一种机器可读的存储介质。
背景技术:
[0002]
在使用诸如公共汽车的公共交通工具时,出现乘客延迟地到达停靠站的情况。在这种情况下,公共汽车驾驶员可以作出打开乘客门的判定或阻止乘客进入。
[0003]
车辆驾驶员的该判定通常受各种各样的因素影响。例如,在交通信号灯切换到“红色”或堵车时公共汽车停住,使得存在由车辆驾驶员重新打开乘客门的可能性。车辆驾驶员的该友好的行为常常与所要求的时间表无关地实施。
[0004]
如果自动化地运行的车辆被用于运送乘客,则通常进行预先给定的时间表的精确遵守。尤其,在这种自动化地运行的车辆的情况下乘客门将与时间相关地关闭。乘客门在此情况下尽管可能有接纳其他乘客的可能性仍将保持关封,以便不危及时间表。
技术实现要素:
[0005]
本发明所基于的任务可以在于,提出用于提高客户价值和对自动化地运行的车辆的接受度的方法。
[0006]
该任务借助独立权利要求的相应主题来解决。本发明的有利设计方案是分别相关的从属权利要求的主题。
[0007]
根据本发明的一个方面,提供一种用于通过控制设备打开可自动化地运行的车辆的乘客门的方法。该控制设备在此情况下可以产生用于直接打开乘客门或用于促使打开乘客门的控制指令。
[0008]
在一个步骤中,接收和评估车辆环境的测量数据。所述测量数据可以通过车辆的环境传感器系统来收集。此外,可以接收外部服务器单元的测量数据,例如用于评定沿着推测的路线或轨迹的在前的交通状况。
[0009]
借助所接收的测量数据探测至少一个潜在乘客和潜在乘客的同乘意图。由此,该车辆可以权衡接纳其他乘客的可能性并且因此也提高客户满意度。潜在乘客可以是行人、轮椅使用者、自行车骑行者、电动滑板车(escooter)的骑行者等。
[0010]
可选的步骤在于,借助所接收的测量数据确定交通状况。交通状况在此情况下可以在邻近的车辆环境中和/或沿着车辆的推测的或所规划的轨迹来确定。
[0011]
紧接着,计算打开乘客门并接纳潜在乘客对时间表的影响。该影响例如可以通过被训练的神经网络、仿真模型和/或通过至少一种算法来计算。在确定所述影响时,可以可选地考虑所确定的交通状况。
[0012]
在另一步骤中,如果确定潜在乘客的同乘意图并且不存在对时间表的影响或存在对时间表的可忽略的影响,则可以为该乘客打开乘客门。如果该潜在乘客具有同乘意图并且通过控制设备确定了该同乘意图,则该潜在乘客变为乘客。
[0013]
根据本发明的另一方面,提供一种控制设备,其中所述控制设备被设立为实施该方法。控制设备例如可以是车辆侧的控制设备或车辆外部的控制设备。例如,控制设备可以与用于实施自动化驾驶功能的车辆控制装置可连接或集成到这种车辆控制装置中。被设计为在外部的控制设备例如可以是基于云技术的车辆外部的服务器单元。
[0014]
此外,根据本发明的一个方面提供一种计算机程序,该计算机程序包括指令,所述指令在由计算机或控制设备实施该计算机程序时促使该计算机或该控制设备实施根据本发明的方法。根据本发明的另一方面提供一种机器可读的存储介质,在所述存储介质上存储有根据本发明的计算机程序。
[0015]
该车辆在此情况下可以是根据bast标准可辅助地、部分自动化地、高度自动化地和/或全自动化地或无驾驶员地运行的。在此,该车辆优选地可以被设立用于运输或运送乘客。尤其,该车辆可以被设计为可自动化地运行的出租车、公共汽车、运输单元、运输车辆、渡轮或空中出租车。代替乘客门,也可以使用通道、人行桥、桥梁等等。
[0016]
可自动化地运行的车辆的时间表可以具有一个或多个时间点和/或时间段。这些时间点在此情况下可以以时钟时间的形式存在。可自动化地运行的车辆必须在时间表的所述时间点和/或在所述时间表的时间段之内到达预先给定的目的地。该时间表也可以具有时间容差,以便例如补偿在驶向(befahren)目的地时提高的交通量和与此相联系的延迟。
[0017]
车辆的环境传感器系统可以具有至少一个传感器。尤其,至少一个传感器可以是lidar传感器、雷达传感器、超声传感器、摄像机传感器等。此外,至少一个传感器也可以被设计为gnss传感器和/或超声传感器。
[0018]
通过该方法可以使自动化地运行的车辆、诸如机器人公共汽车(robobus)、机器人出租车(robotaxi)、空中出租车等与人类车辆驾驶员的友好的行为适配。尤其,因此车辆的反应可以更友好地实施并且自动化地运行的车辆的接受度可以被提高。
[0019]
根据一个实施例,潜在乘客的同乘意图通过潜在乘客的运动速度、运动方向、推测的轨迹和/或通过运动模式来确定。在此情况下,例如可以预测潜在乘客的运动方向和路径。如果潜在乘客向车辆和/或乘客门移动,则借助地图或可能的人行道或人行通道可以确定同乘意图。
[0020]
根据另一实施方式,交通状况借助所接收的测量数据来确定。优选地,打开乘客门并接纳潜在乘客对时间表的影响在考虑到所确定的交通状况的情况下来计算。在此情况下,可以考虑现有的计划或路线的微小的变化或偏差。尤其,例如可以适配最初所计划的轨迹或如果在停靠站没有乘客上车或下车,则可以跳过该停靠站。
[0021]
根据另一实施例,计算潜在乘客在乘客门处的推测的到达时间以确定对时间表的影响。基于同乘意图的确定可以计算直至乘客抵达乘客门处的持续时间。由此,可以执行检查:等待乘客是否对时间表有可忽略的影响。
[0022]
根据另一实施例,乘客在乘客门处的推测的到达时间借助乘客的运动速度、停靠站几何形状、交通信号灯状态和/或借助乘客的运动方向来估计。通过这些因素可以特别精确地确定乘客在乘客门处的到达时间。
[0023]
根据另一实施方式,交通状况在邻近的车辆环境中和/或沿着所计划的轨迹来确定并且被用于估计对时间表的影响。例如,可以检查:沿着所计划的轨迹是否已形成堵车或存在低的交通量。为了得到相应的信息,也可以联系第三方供应商或外部服务器单元。如果
沿着轨迹存在高的交通量,则与在推测不受阻碍地行驶的情况下相比可以更批判性地或在更严格的标准下考虑所述影响。由此,对将来的延迟的前瞻性考虑可以被用于打开乘客门的判定。
[0024]
根据另一实施方式,借助出发的时间延迟来评价对时间表的影响,其中可忽略的影响对应于处于容差阈值之下的时间延迟。由此,时间值可以被用作比较值,以便作出打开乘客门或让乘客门保持在关闭状态中的判定。通过该措施可以在技术上特别简单地确定影响。
[0025]
根据另一实施方式,静态地或动态地确定容差阈值,其中动态容差阈值基于沿着所计划的轨迹的交通状况和/或基于多个上车的乘客来确定。如果车辆可以不受阻碍地在其所计划的路线上行驶,则可以提高容差阈值,使得能够实现更大的时间延迟。在高的交通量和用于在所计划的轨迹上行驶的推测更长的持续时间的情况下,可以降低容差阈值,以便尽可能小地构成时间损耗。
附图说明
[0026]
在下文中借助大大简化的示意图更详细地解释本发明的优选的实施例。在此情况下:图1示出用于阐明根据本发明的方法的布置的示意图,以及图2示出用于阐明根据一个实施例的方法的示意性图表。
具体实施方式
[0027]
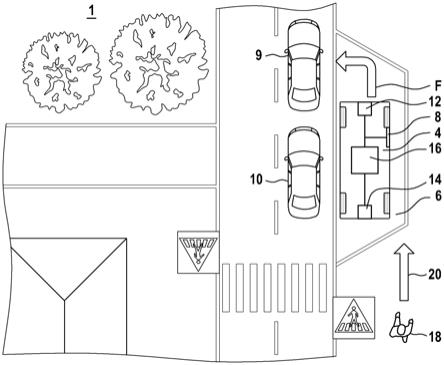
图1示出用于阐明根据本发明的方法2的布置1的示意图。布置1示出可自动化地运行的车辆4。
[0028]
可自动化地运行的车辆4根据该实施例是公共汽车。然而,车辆4可以是任意其他车辆,诸如载客汽车或所谓的机器人出租车(robotaxi)、空中出租车、渡船等等。
[0029]
车辆4处于停靠站6中并且已经将其乘客门8关闭,以便开始继续行驶。由于堵车,两个交通参与者9、10阻挡车辆4从停靠站6驶出。
[0030]
车辆4具有环境传感器系统,其示例性地由两个摄像机传感器12、14构成。摄像机传感器12朝着行驶方向f定向。第二摄像机传感器14与行驶方向f相反地定向。通过环境传感器系统12、14所确定的测量数据可以由车辆4的控制设备16接收和评估。
[0031]
潜在乘客18靠近车辆4并且通过第二摄像机传感器14被检测到。潜在乘客18根据该实施例被实施为行人。控制设备16可以借助潜在乘客18的运动模式通过评估所述测量数据将行人18分类为“跑步的”并且计算潜在乘客18的轨迹20,所述轨迹通向车辆4的乘客门8。因此,可以假定潜在乘客18的同乘意图。基于所确定的潜在乘客18的同乘意图,该潜在乘客变为乘客18。
[0032]
基于对车辆4的时间表的影响的估计,可以重新打开乘客门8,以便接纳乘客18作为乘客或乘客门8可以继续保持关闭,以便保证畅通无阻的继续行驶。
[0033]
在图2中示出了用于阐明根据一个实施例的方法2的示意性图表。该方法2尤其用于打开可自动化地运行的车辆4的乘客门8。相应的控制指令可以由控制设备16生成。
[0034]
在步骤21中,车辆4的环境传感器系统的测量数据由控制设备16接收。相应的测量
数据例如可以从第一摄像机传感器12和第二摄像机传感器14得到。
[0035]
此外,其他传感器、诸如雷达传感器22和lidar传感器24可以被用于收集测量数据。此外,可以从外部单元25接收数据和信息,例如用于得到交通信息。所收集的测量数据可以通过控制设备16被合并。
[0036]
长期存储器和被训练的行为模式可以用作其他数据源26。尤其,这种源26可以包含乘客18到相应的停靠站6的运动模式和轨迹。
[0037]
为了可自动化地运行的车辆4能够将其轨迹规划包含到所述方法2通过控制设备16的实施中,需要地图27、诸如had地图。
[0038]
根据所接收的车辆传感器系统12、14、22、24的测量数据21和例如已经存储的或从外部服务器单元或交通参与者得到的其他数据25、26、27可以在另一步骤中创建环境模型28。
[0039]
基于所创建的环境模型28探测29在车辆4的车辆环境中的潜在乘客18。除了探测潜在乘客18之外估计其轨迹20。所述轨迹20例如可以借助潜在乘客18在停靠站6之内的运动方向、运动速度和已经已知的轨迹来确定。此外,特定的运动模式、诸如向车辆4示意或奔跑等等可以被确定和分类。基于这些计算的结果可以确定潜在乘客18的同乘意图30。
[0040]
与此并行地,在另一步骤31中借助所接收的测量数据确定交通状况。为此,可以利用动态对象、如交通参与者9、10的数据、道路地图、交通流量数据、交通预报等等。
[0041]
在考虑到所确定的交通状况31的情况下,在另一步骤32中计算打开乘客门8并将乘客18接纳到车辆4中对车辆4的时间表的影响。
[0042]
打开乘客门8在此情况下对应于重新打开乘客门8,因为车辆4在图1中所示出的情况下已关闭了乘客门8并且已经等待继续行驶。
[0043]
对时间表的影响32优选地可以借助时间容差来评价。如果没有发生时间损耗,则因此不存在对时间表的影响。如果由于等待和接纳乘客18而产生的时间损耗在容差阈值之内,则可能存在对车辆4的时间表的可忽略的影响。
[0044]
优选地,容差阈值可以动态地或静态地来定义。在动态的容差阈值的情况下,例如交通状况31可以被用于提高或降低容差阈值。
[0045]
在紧接着的步骤中,如果确定潜在乘客18的同乘意图并且不存在对时间表的影响或存在对时间表的可忽略的影响,则可以为该乘客18打开33乘客门8。如果不满足这些标准,则乘客门8保持关闭34,使得该车辆4可以开始其继续行驶。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1