一种船舶内河航行预警与辅助避碰方法及装置与流程
[0001]
本发明涉及航行避碰技术领域,尤其涉及一种船舶内河航行预警与辅助避碰方法、装置、系统及计算机存储介质。
背景技术:
[0002]
近年来,国家加快了内河航运中心的建设。由于内河航道窄且多弯曲,内河船舶数量多,通航密度大,即使改善了内河航行环境,内河船舶数量逐渐减少,船舶碰撞事故仍然频繁发生。据统计,在2019年的船舶交通事故中,内河水域占比49.3%,内河船舶占比59.9%。在水上运输过程中,无论是人、机还是环境都存在潜在的事故隐患,一旦发生水上交通事故,往往会造成严重的经济损失、人员伤亡和环境污染。
[0003]
精准、可靠的导助航设备是保障内河船舶安全航行的前提。船舶驾驶员可以通过各类助航设备获取船舶附近的动态和静态信息,再结合船舶驾驶员的良好船艺使得船舶得以安全航行。
[0004]
通过助航设备可以精确、有效的获取一定范围内的船舶和环境数据,能够为船舶驾驶员做航行决策提供辅助。但是存在以下两个问题:现有助航设备不具有有效的航行预警和避碰辅助决策功能,仅能数字化展现船舶周围动态和静态信息,现有设备也未融入内河航行规则,无法为船员提供规则方面的提示。
技术实现要素:
[0005]
有鉴于此,有必要提供一种船舶内河航行预警与辅助避碰方法及装置,用以解决目前内河船舶助航设备不具有有效的早期危险预警以及航行辅助决策功能的问题。
[0006]
本发明提供一种船舶内河航行预警与辅助避碰方法,包括以下步骤:
[0007]
获取航道边界数据以及碍航物数据,将航道划分为多个航段,将每一航段相对应的航段边界数据以及碍航物数据与相应的航段相关联;
[0008]
获取本船舶的位置数据以及航向数据;
[0009]
根据本船舶的实时位置数据以及各航段的航段边界数据,获取本船舶所在航段作为当前航段;
[0010]
对比本船舶的航向数据以及当前航段的走向数据,判断船舶是否顺航道行驶,如果是,则根据当前航段的航段边界数据获取偏航数据,并根据当前航段的碍航物数据获取避碰数据,基于内河避碰规则获取与所述避碰数据相对应的辅助决策数据;
[0011]
基于所述偏航数据输出偏航预警信息,基于所述辅助决策数据输出辅助避碰决策信息。
[0012]
进一步的,获取本船舶的位置数据以及航向数据,具体为:
[0013]
获取船舶的雷达信号与ais信号,分别对所述雷达信号以及ais信号进行数据解析;
[0014]
采用加权融合算法对解析后的雷达信号与ais信号进行融合,得到融合数据作为
所述位置数据以及航向数据。
[0015]
进一步的,根据本船舶的实时位置数据以及各航段的航段边界数据,获取本船舶所在航段作为当前航段,具体为:
[0016]
根据各航段的航段边界数据依次判断本船舶是否位于各航段内,得到所述当前航段;
[0017]
根据航段边界数据判断本船舶是否位于相应航段内,具体为:
[0018]
所述航段边界数据包括航段的四个顶点的坐标位置,根据四个顶点坐标位置获取四个顶点与船舶位置之间的连线,并计算每两条相邻连线之间的夹角之和;
[0019]
判断所述夹角之和是否位于区间[360-c0,360+c0]之内,c0为常数,如果是,则判定船舶位于相应航段内,否则判定船舶不位于相应航段内。
[0020]
进一步的,对比本船舶的航向数据以及当前航段的走向数据,判断船舶是否顺航道行驶,具体为:
[0021]
根据本船舶的航向数据以及当前航段的走向数据计算本船舶航向与当前航段走向之间的角度差值,判断所述角度差值是否在设定角度之内,如果是,则判定本船舶顺航道行驶,否则判定本船舶没有顺航道行驶。
[0022]
进一步的,根据当前航段的航段边界数据获取偏航数据,具体为:
[0023]
所述偏航数据包括本船舶距离下一转向点的距离和时间、本船舶与航段边界的距离以及本船舶与航段中心线的距离;
[0024]
计算本船舶距离下一转向点的距离,具体为:
[0025][0026]
其中,s为本船舶距离下一转向点的距离,(x0,y0)为本船舶位置坐标,(x1,y1)为、(x2,y2)、(x3,y3)、(x4,y4)分别为当前航段四个顶点的坐标,tc为本船舶航向角度;
[0027]
计算本船舶距离下一转向点的时间,具体为:
[0028][0029]
其中,t为本船舶距离下一转向点的时间,v
o
为本船舶航速;
[0030]
计算本船舶距离当前航段边界的距离,具体为:
[0031]
d=min(d
u
,d
d
);
[0032]
其中,d为本船舶距离当前航段边界的距离,min()表示取最小值,d
u
为本船舶距离当前航段一侧边界的距离,d
d
为本船舶距离当前航段另一侧边界的距离;
[0033]
计算本船舶距离当前航段中心线的距离,具体为:
[0034]
获取当前航段中心线的中心线直线方程,根据所述中心点直线方程计算本船舶距离当前航段中心线的距离:
[0035]
[0036]
其中,其中,a、b、c为中心线直线方程的系数,d
yaw
为本船舶距离当前航段中心线的距离。
[0037]
进一步的,根据当前航段的碍航物数据获取避碰数据,具体为:
[0038]
计算虚拟船位坐标作为左偏心椭圆模型的椭圆中心,基于所述椭圆中心建立描述本船舶的船舶领域的左偏心椭圆模型:
[0039]
基于所述碍航物数据,计算其它船舶相对于本船舶的相对速度矢量;
[0040]
计算所述相对速度矢量所在直线的矢量直线方程;
[0041]
根据所述矢量直线方程以及所述左偏心椭圆模型判断相对矢量直线与左偏心椭圆是否相交,如果是,则判定其它船舶与本船舶在空间上存在碰撞危险,否则判定其它船舶与本船舶在空间上不存在碰撞危险;
[0042]
结合所有其它船舶与本船舶的碰撞危险判断结果,得到所述避碰数据。
[0043]
进一步的,还包括:
[0044]
分别计算所有与本船舶存在碰撞危险的危险船舶进入本船舶的船舶领域的进入时间;
[0045]
筛选出进入时间最小的危险船舶作为最危险船舶;
[0046]
建立内河避碰规则,从所述内河避碰规则中查找与最危险船舶相对应的避碰决策,得到所述避碰数据。
[0047]
本发明还提供一种船舶内河航行预警与辅助避碰装置,包括处理器以及存储器,所述存储器上存储有计算机程序,所述计算机程序被所述处理器执行时,实现所述船舶内河航行预警与辅助避碰方法。
[0048]
本发明还提供一种船舶内河航行预警与辅助避碰系统,包括所述船舶内河航行预警与辅助避碰装置,还包括采集装置以及显示装置;
[0049]
所述采集装置用于采集本船舶的位置数据以及航向数据,所述显示装置用于对所述偏航预警信息以及辅助避碰决策信息进行显示。
[0050]
本发明还提供一种计算机存储介质,其上存储有计算机程序,所述计算机该程序被处理器执行时,实现所述船舶内河航行预警与辅助避碰方法。
[0051]
有益效果:本发明首先提取航道边界数据和碍航物数据并存入基础数据库,其中航道数据采取分段的形式存入。然后获取本船舶的位置数据以及航向数据,根据本船舶的实时位置数据以及各航段的航段边界数据,判断本船舶当前位于哪一个航段,得到当前航段。从基础数据库中提取当前航段的相关数据,对比本船舶的航向数据以及当前航段的走向数据,即判断船舶是否顺航道行驶,如果是,则进一步计算具体的偏航数据和避碰数据,实现偏航预警和辅助避碰。本发明能够有效实现航行偏航预警以及辅助避碰决策,同时充分考虑内河避碰规则,输出的预警信息和给出的辅助决策符合内河避碰规则的要求,从而保障船舶安全航行。
附图说明
[0052]
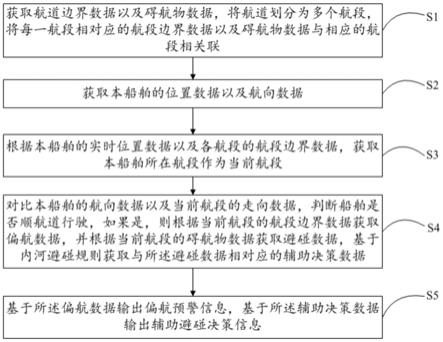
图1为本发明提供的船舶内河航行预警与辅助避碰方法第一实施例的方法流程图;
[0053]
图2a为图1中步骤s1一实施例的航道边界数据提取及分段示意图;
[0054]
图2b为图1中步骤s1一实施例的航道边界数据存储形式示意图;
[0055]
图3a为图1中步骤s1一实施例的碍航物数据提取示意图;
[0056]
图3b为图1中步骤s1一实施例的碍航物数据存储行驶示意图;
[0057]
图4为本发明提供的船舶内河航行预警与辅助避碰方法第一实施例的航道边界数据以及碍航物数据的数据图;
[0058]
图5为本发明提供的船舶内河航行预警与辅助避碰方法第一实施例的雷达信号及ais信号数据图;
[0059]
图6为图5中雷达信号及ais信号进行数据融合的效果图;
[0060]
图7为本发明提供的船舶内河航行预警与辅助避碰方法第一实施例的夹角之和计算原理图;
[0061]
图8a为本发明提供的船舶内河航行预警与辅助避碰方法第一实施例的本船舶在航道外行驶时的预警信息图;
[0062]
图8b为本发明提供的船舶内河航行预警与辅助避碰方法第一实施例的本船舶在航道内行驶但偏航时的预警信息图;
[0063]
图8c为本发明提供的船舶内河航行预警与辅助避碰方法第一实施例的本船舶在航道内行驶且顺航道行驶时的预警信息图;
[0064]
图9为本发明提供的船舶内河航行预警与辅助避碰方法第一实施例的左偏心椭圆模型图;
[0065]
图10为本发明提供的船舶内河航行预警与辅助避碰方法第一实施例的基于左偏心椭圆模型判断碰撞危险的原理图;
[0066]
图11为本发明提供的船舶内河航行预警与辅助避碰方法第一实施例的局面辨识模型图;
[0067]
图12为本发明提供的船舶内河航行预警与辅助避碰方法第一实施例的航行预警及避碰辅助决策显示图。
具体实施方式
[0068]
下面结合附图来具体描述本发明的优选实施例,其中,附图构成本申请一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
[0069]
实施例1
[0070]
如图1所示,本发明的实施例1提供了船舶内河航行预警与辅助避碰方法,包括以下步骤:
[0071]
s1、获取航道边界数据以及碍航物数据,将航道划分为多个航段,将每一航段相对应的航段边界数据以及碍航物数据与相应的航段相关联,建立基础数据库;
[0072]
s2、获取本船舶的位置数据以及航向数据;
[0073]
s3、根据本船舶的实时位置数据以及各航段的航段边界数据,获取本船舶所在航段作为当前航段;
[0074]
s4、对比本船舶的航向数据以及当前航段的走向数据,判断船舶是否顺航道行驶,如果是,则根据当前航段的航段边界数据获取偏航数据,并根据当前航段的碍航物数据获取避碰数据,基于内河避碰规则获取与所述避碰数据相对应的辅助决策数据;
[0075]
s5、基于所述偏航数据输出偏航预警信息,基于所述辅助决策数据输出辅助避碰决策信息。
[0076]
本实施例首先在电子海图上提取航道边界数据和碍航物数据,如图2a和图3a所示。将从电子海图上提取的航道边界数据和碍航物数据存入基础数据库,其中航道数据采取分段的形式存入,如图2b所示,包括航段编号和航段四个顶点的经纬度信息以及航道走向信息;碍航物数据存储形式如图3b所示,其中包括碍航物中心点和危险区域半径。
[0077]
具体的,图2a中虚线即航道边界,图2a中示出了划分的三个航段,分别为航段i、航段i+1和航段i+2。图2b中示出了航段边界数据channel_date的存储形式,包括航段编号id_channel、右上顶点经度lon_topright、右上顶点纬度lat_topright、左上顶点经度lon_topleft、左上顶点纬度lat_topleft、右下顶点lon_lowerright、右下顶点纬度lat_lowerright、左下顶点经度lat_lowerleft、左下顶点纬度lon_lowerleft、航段走向信息c_trend。航段编号采用整数int形式表示,各顶点的经纬度以及航段走向信息采用小数decimal形式表示,初始默认值default均设置空值null。图3a中示出了五个碍航物,用圆圈标识,图3b中示出了碍航物数据obstacle_date,包括中心点经度lon_center、中心点维度lat_center、危险区域半径r_dangercircle,均采用小数decimal形式表示,初始默认值default均设置空值null。
[0078]
按照图2b和图3b中数据格式对航道边界数据和碍航物数据进行存储后,得到基础数据库,基础数据库中航道边界数据和碍航物数据如图4所示。基础数据库建立好后,船舶航行时就可以实时从基础数据库中获取船舶周围的环境状况,从而实现后续的偏航预警和辅助避碰。具体的,首先获取本船舶的位置数据以及航向数据,根据本船舶的实时位置数据以及各航段的航段边界数据,判断本船舶当前位于哪一个航段,得到当前航段。从基础数据库中提取当前航段的相关数据,对比本船舶的航向数据以及当前航段的走向数据,即判断船舶是否顺航道行驶,如果是,则进一步计算具体的偏航数据和避碰数据,实现偏航预警和辅助避碰。具体的,具体的偏航数据,通过当前航段的航段边界数据与本船舶的航向数据进行计算即可获取,避碰数据根据当前航段的碍航物数据以及本船舶的位置数据以及航向数据即可获取。获取到避碰数据之后,基于内河避碰规则计算避碰数据相对应的航行辅助决策数据。最后根据偏航数据和辅助决策数据输出偏航预警信息和辅助避碰决策信息,偏航预警信息和辅助避碰决策信息的形式可以采用图、表、文字、语音、视频等形式体现。
[0079]
本发明能够有效实现航行偏航预警以及辅助避碰决策,同时充分考虑内河避碰规则,输出的预警信息和给出的辅助决策符合内河避碰规则的要求,从而保障船舶安全航行。
[0080]
优选的,获取本船舶的位置数据以及航向数据,具体为:
[0081]
获取船舶的雷达信号与ais信号,分别对所述雷达信号以及ais信号进行数据解析;
[0082]
采用加权融合算法对解析后的雷达信号与ais信号进行融合,得到融合数据作为所述位置数据以及航向数据。
[0083]
通过船用雷达与ais设备实时获取原始雷达/arpa信号和原始ais信号,如图5所示。雷达/arpa信号和ais信号都是标准的nmea0183协议格式,通过解析该格式提取出需要的雷达/arpa数据和ais数据,采用加权融合算法将雷达和ais数据进行预处理、航迹关联和数据融合,获取更精确、抗干扰能力更强、监测范围更广的数据,从而保障船舶安全航行。图
6是使用加权融合算法进行融合后的效果示意图,从图6中可以看出,融合后的航迹与真实航迹更贴近。
[0084]
具体的,根据本船舶的实时位置数据以及各航段的航段边界数据,获取本船舶所在航段作为当前航段之前,还包括:
[0085]
将所述位置数据、航段边界数据以及碍航物数据转换为同一坐标系下的坐标。
[0086]
在进行偏航预警和辅助避碰决策之前,先将需要用到的位置信息转换至同一的固定坐标系,方便后续计算。需要统一的位置信息具体包括:融合后的船舶位置数据、航向数据,以及从基础数据库中提取的航道边界数据和碍航物数据,其表现形式都为经度λ和纬度为了便于计算,需要将经纬度信息转换为固定坐标系xoy中的(x,y),为了避免转换过程中符号不一致,将把所有的物标都放在固定坐标系xoy中的第一象限,假设固定坐标系xoy中选取的原点经纬度为将经纬度为转换为在固定坐标系下的坐标为(x
t
,y
t
),转换公式如下式所示:
[0087][0088]
优选的,根据本船舶的实时位置数据以及各航段的航段边界数据,获取本船舶所在航段作为当前航段,具体为:
[0089]
根据各航段的航段边界数据依次判断本船舶是否位于各航段内,得到所述当前航段;
[0090]
根据航段边界数据判断本船舶是否位于相应航段内,具体为:
[0091]
所述航段边界数据包括航段的四个顶点的坐标位置,根据四个顶点坐标位置获取四个顶点与船舶位置之间的连线,并计算每两条相邻连线之间的夹角之和:
[0092]
c
t
=c1+c2+c3+c4;
[0093]
其中,c
t
为夹角之和,c1为第一个顶点所在连线与第二个顶点所在连线之间的夹角,c2为第二个顶点所在连线与第三个顶点所在连线之间的夹角,c3为第三个顶点所在连线与第四个顶点所在连线之间的夹角,c4为第四个顶点所在连线与第一个顶点所在连线之间的夹角;
[0094]
判断所述夹角之和是否位于区间[360-c0,360+c0]之内,c0为常数,如果是,则判定船舶位于相应航段内,否则判定船舶不位于相应航段内。
[0095]
具体的,如图7所示,航段的四个顶点组成四边形的航段边界,如果本船舶位于航段内,即位于四边形内,则理论上夹角之和为360度,如果本船舶不位于航段内,则夹角之和小于360度。因此本实施利用这一点,先计算夹角之和,然后考虑到测量以及计算的误差,判断夹角之和是否位于区间[360-c0,360+c0]之内,c0根据误差估算进行取值,经过上述判断,即可得知本船舶是否位于相应航段内。依次判断各航段,即可找到本船舶所在的当前航段。
[0096]
具体的,并计算每两条相邻连线之间的夹角,具体为:
[0097]
[0098][0099][0100][0101]
其中,(x0,y0)为船舶位置坐标,(x1,y1)为第一个顶点的坐标,(x2,y2)为第二个顶点的坐标,(x3,y3)为第三个顶点的坐标,(x4,y4)为第四个顶点的坐标。
[0102]
优选的,对比本船舶的航向数据以及当前航段的走向数据,判断船舶是否顺航道行驶,具体为:
[0103]
根据本船舶的航向数据以及当前航段的走向数据计算本船舶航向与当前航段走向之间的角度差值,判断所述角度差值是否在设定角度之内,如果是,则判定本船舶顺航道行驶,否则判定本船舶没有顺航道行驶。
[0104]
判断完本船舶所处的当前航段后,紧接着判断本船舶是否顺航道行驶。设当前航段走向为c,本船舶真航向为tc0,若两者相差在设定角度,例如10度内,则认为本船舶顺航道行驶,否则认为本船舶没有顺航道行驶,至此,船舶与航道的位置关系已经求出。
[0105]
具体的,还包括:如果船舶没有顺航道行驶,则输出顺航道行驶提示信息。
[0106]
经过上述判断后,若本船舶在航道外或在航道内但未顺航道行驶,则不进行后续的偏航预警以及辅助避碰决策,航行预警信息输出“请驶入推荐航道”或“请顺航道行驶”等提示信息,提示驾驶员行驶至航道内且顺航道行驶即可。本船舶在航道外时的预警信息如图8a所示,本船舶在航道内但未顺航道行驶的预警信息如图8b所示,
[0107]
若本船舶在航道内且顺航道行驶,则需要计算转向点提示、航道边界提示以及偏航提示信息,具体计算如下。
[0108]
优选的,根据当前航段的航段边界数据获取偏航数据,具体为:
[0109]
所述偏航数据包括本船舶距离下一转向点的距离和时间、本船舶与航段边界的距离以及本船舶与航段中心线的距离;
[0110]
计算本船舶距离下一转向点的距离,具体为:
[0111][0112]
其中,s为本船舶距离下一转向点的距离,(x0,y0)为本船舶位置坐标,(x1,y1)为、(x2,y2)、(x3,y3)、(x4,y4)分别为当前航段四个顶点的坐标,tc为本船舶航向角度;
[0113]
计算本船舶距离下一转向点的时间,具体为:
[0114][0115]
其中,t为本船舶距离下一转向点的时间,v
o
为本船舶航速;
[0116]
计算本船舶距离当前航段边界的距离,具体为:
[0117]
d=min(d
u
,d
d
);
[0118][0119][0120]
其中,d为本船舶距离当前航段边界的距离,min()表示取最小值,d
u
为本船舶距离当前航段一侧边界的距离,d
d
为本船舶距离当前航段另一侧边界的距离;
[0121]
计算本船舶距离当前航段中心线的距离,具体为:
[0122]
获取当前航段中心线的直线方程:
[0123][0124]
其中,a、b、c为中心线直线方程的系数,x为中心线直线方程自变量,y为中心线直线方程因变量;
[0125]
本船舶距离当前航段中心线的距离为:
[0126][0127]
其中,d
yaw
为本船舶距离当前航段中心线的距离。
[0128]
若为本船舶距离当前航段边界的距离d小于设定值d
set
,则会提示本船舶靠近航段边界,注意安全航行。若d大于d
yaw
,则提示船舶偏离推荐航线,注意安全航行。获取到上述偏航数据后,在航行预警提示界面显示如图8c所示的偏航预警信息。
[0129]
优选的,根据当前航段的碍航物数据获取避碰数据,具体为:
[0130]
建立描述本船舶的船舶领域的左偏心椭圆模型:
[0131]
计算虚拟船位坐标作为左偏心椭圆模型的椭圆中心;
[0132]
基于所述椭圆中心建立所述左偏心椭圆模型;
[0133]
基于所述碍航物数据,计算其它船舶相对于本船舶的相对速度矢量;
[0134]
计算所述相对速度矢量所在直线的矢量直线方程;
[0135]
判断相对速度矢量所在直线与所述左偏心椭圆模型是否相交,如果是,则判定其它船舶与本船舶在空间上存在碰撞危险,否则判定其它船舶与本船舶在空间上不存在碰撞危险;
[0136]
根据本船舶与所有其它船舶的碰撞危险判断结果,得到所述避碰数据。
[0137]
本实施例首先建立符合内河特点的左偏心椭圆船舶领域模型,椭圆的长半轴和短
半轴,可根据实际情况取值,本实施例建立的模型如图9所示。图9中有两个船位,位于椭圆中心的用虚线表示的是虚拟船位,位于虚拟船左下方用实线表示的是真实船位,真实船位偏离椭圆中心左后方角度为θ,且与中心的距离为r,r为椭圆中心沿真实船位方向至椭圆边界的距离。在空间坐标系xoy中,虚拟船位(即椭圆中心)的坐标计算公式如下式所示:
[0138]
x
inv
=x
act-rsin(tc+θ);
[0139]
y
inv
=y
act-rcos(tc+θ);
[0140]
其中,(x
act
,y
act
)为本船舶船位坐标,(x
inv
,y
inv
)为虚拟船位坐标,θ本船舶船位偏离椭圆中心的角度,r为本船舶船位距离椭圆中心的距离,r=4/r,r为椭圆中心沿θ方向至椭圆边界的距离,a为椭圆长半轴长度,b为椭圆短半轴长度,r2=a2b2/(a2sin2θ+b2cos2θ),tc为本船舶航向角度。
[0141]
计算椭圆中心建立的左偏心椭圆模型如下所示:
[0142][0143]
其中,w为本船舶逆时针旋转角度,w=360-tc。
[0144]
运用速度障碍法计算其它船舶是否与本船舶有碰撞危险,图10为判断碍航物是否在本船舶船舶领域外安全通过的示意图,图10中的船舶领域采用的是上面所建立的左偏心椭圆船舶领域模型,v0为本船舶速度矢量,v1为其它船舶速度矢量,v
p
为其它船舶相对于本船舶的速度矢量,ac为v
p
矢量方向的延长线,速度矢量v
p
的模长和方向通过下式可以求出:
[0145][0146][0147]
其中,v
p
为其它船舶相对于本船舶的速度,u为本船舶与其它船舶在x轴方向的合速度大小,v为船舶与其它船舶在y轴方向的合速度大小,v1为其它船舶速度,v0为本船舶速度,tc1为其它船舶航向,tc0为本船舶航向;tc
p
为其它船舶相对于本船舶的方向;
[0148]
结合上式可以求出其它船舶相对于本船舶的速度矢量v
p
,若已知其它船舶的坐标(x
tar
,y
tar
),则可以通过下式求出图10中直线ac的直线方程:
[0149][0150]
其中,(x
tar
,y
tar
)为其它船舶的坐标,x为矢量直线方程自变量,y为矢量直线方程因变量;
[0151]
若直线ac与本船舶船舶领域相交,则其它船舶和本船舶在空间上存在碰撞危险,若相切或无交点,则在空间上不存在碰撞危险,通过联立左偏心椭圆模型的方程和直线ac的直线方程求解,便可判断矢量直线是否与本船舶的船舶领域有交点。若联立求解出的结果有两个根,当两船保持目前运动状态的情况下,其它船舶在空间上对本船舶有碰撞危险,
若为一个根或无解,则其它船舶对本船舶不构成碰撞危险。
[0152]
优选的,还包括:
[0153]
分别计算所有与本船舶存在碰撞危险的危险船舶进入本船舶的船舶领域的进入时间;
[0154]
筛选出进入时间最小的危险船舶作为最危险船舶;
[0155]
建立内河避碰规则,从所述内河避碰规则中查找与最危险船舶相对应的避碰决策,将对相应的避碰决策进行推送。
[0156]
通过上述联立求解得到的根,即可得到其它船舶舶进入本船舶船舶领域的点(x
in
,y
in
),则进入本船舶的船舶领域的时间t
in
可通过下式计算:
[0157][0158]
其中,t
in
为危险船舶进入本船舶的船舶领域的进入时间,(x
tar
,y
tar
)为危险船舶的坐标,(x
in
,y
in
)为危险船舶进入本船舶的船舶领域的点,即危险船舶与本船舶的相对速度矢量所在直线与左偏心椭圆船舶领域模型的交点,v1为危险船舶的速度;
[0159]
分别计算出所有危险船舶进入本船舶的船舶领域的时间,t
in
最小的危险船舶就是最危险船舶。
[0160]
依据《内河避碰规则》与船员良好船艺建立内河船舶会遇局面辨识模型,辨识最危险船舶与本船舶所处局面,局面辨识模型如图11所示。具体的,《内河避碰规则》中船舶会遇局面划分为三大种类:追越、交叉和对遇,其中,追越分为追越和被追越,交叉分为左舷交叉和右舷交叉,左舷交叉分为左舷小角度交叉和左舷大角度交叉,右舷交叉分为右舷小角度交叉和右舷大角度交叉。图11中划分了各种不同局面的角度分布,根据船舶会遇时的角度即可判断出相应的局面。
[0161]
量化《内河避碰规则》得到内河避碰规则,提出不同局面可能的避碰行动原则,基于最危险船舶与本船舶所处局面计算出符合规则和良好船艺要求的避碰辅助决策。本实施例建立的量化内河避碰规则如下表所示:
[0162]
表1、不同局面可能的避碰行动原则
[0163][0164]
根据最危险船舶与本船舶所处局面从上表中获取相应的避碰行动得到相应的辅助决策数据,最后将其输出显示,如图12所示。
[0165]
本船舶不断的进行船舶位置数据和航向数据的实时获取,以及计算,从而实现内
河船舶航行实时预警与实时避碰辅助决策。
[0166]
实施例2
[0167]
本发明的实施例2提供了船舶内河航行预警与辅助避碰装置,包括处理器以及存储器,所述存储器上存储有计算机程序,所述计算机程序被所述处理器执行时,实现实施例1提供的船舶内河航行预警与辅助避碰方法。
[0168]
本发明实施例提供的船舶内河航行预警与辅助避碰装置,用于实现船舶内河航行预警与辅助避碰方法,因此,船舶内河航行预警与辅助避碰方法所具备的技术效果,船舶内河航行预警与辅助避碰装置同样具备,在此不再赘述。
[0169]
实施例3
[0170]
本发明的实施例3提供了船舶内河航行预警与辅助避碰系统,包括实施例2提供的船舶内河航行预警与辅助避碰装置,还包括采集装置以及显示装置;
[0171]
所述采集装置用于采集本船舶的位置数据以及航向数据,所述显示装置用于对所述偏航预警信息以及辅助避碰决策信息进行显示。
[0172]
具体的,本实施例中采集装置由一台船用雷达和一套ais设备组成;船舶内河航行预警与辅助避碰装置采用计算机,计算机上采用船舶内河航行预警与辅助避碰方法实现数据处理计算等;显示装置包括信息传输装置和显示平台,信息传输装置用于接收计算机的处理结果,显示平台对处理结果进行显示。
[0173]
实施例4
[0174]
本发明的实施例4提供了计算机存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实现实施例1提供的船舶内河航行预警与辅助避碰方法。
[0175]
本发明实施例提供的计算机存储介质,用于实现船舶内河航行预警与辅助避碰方法,因此,船舶内河航行预警与辅助避碰方法所具备的技术效果,计算机存储介质同样具备,在此不再赘述。
[0176]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1